SISTEMA DE GENERADOR CON PROCESAMIENTO INTELIGENTE DE SEÑAL DE POSICIÓN.
Sistema de generador de potencia eléctrica que incluye - un generador de potencia (GEN) que incluye un rotor impulsado por un árbol,
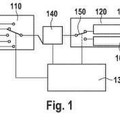
- un procesador (DSP) dispuesto - para calcular una posición angular (AP) en respuesta a una señal de posición (PS) que representa una posición angular del rotor, - para calcular una posición angular estimada (EAP) basándose en señales de posición recibidas anteriormente, y - para generar una posición angular procesada (PAP) basándose en comparar la posición angular (AP) calculada y la posición angular estimada (EAP) , caracterizado porque el sistema comprende un codificador de posición (ENC) dispuesto para detectar la posición angular del rotor a través de una conexión mecánica al árbol, y para generar dicha señal de posición (PS) , y porque el procesador (DSP) incluye una unidad de corrección (CORR) dispuesta para detectar y corregir tipos de errores predeterminados en la señal de posición (PS) antes de calcular la posición angular (AP) , en el que el procesador (DSP) está dispuesto para corregir la señal de posición (PS) basándose en una propiedad almacenada anteriormente de al menos uno de: el codificador de posición (ENC) , y el generador de potencia (GEN) .
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E08171178.
Solicitante: VESTAS WIND SYSTEMS A/S.
Nacionalidad solicitante: Dinamarca.
Dirección: ALSVEJ 21 8940 RANDERS DINAMARCA.
Inventor/es: BENDIXEN,Flemming,Buus , Larsen,Kim Brøndum, Lau,Mogens Lønberg.
Fecha de Publicación: .
Fecha Solicitud PCT: 10 de Diciembre de 2008.
Clasificación PCT:
- G01D5/244 FISICA. › G01 METROLOGIA; ENSAYOS. › G01D MEDIDAS NO ESPECIALMENTE ADAPTADAS A UNA VARIABLE PARTICULAR; DISPOSICIONES PARA LA MEDIDA DE DOS O MAS VARIABLES NO CUBIERTAS POR OTRA UNICA SUBCLASE; APARATOS CONTADORES DE TARIFA; DISPOSICIONES PARA TRANSFERENCIA O TRANSDUCTORES NO ESPECIALMENTE ADAPTADAS A UNA VARIABLE PARTICULAR; MEDIDAS O ENSAYOS NO PREVISTOS EN OTRO LUGAR. › G01D 5/00 Medios mecánicos para la transferencia de la magnitud de salida de un elemento sensor; Medios para la conversión de la magnitud de salida de un elemento sensor en otra variable, en los que la forma o naturaleza del elemento sensor no determinan los medios de conversión; Transductores no especialmente adaptados a una variable específica (G01D 3/00 tiene prioridad; especialmente adaptados para aparatos que dan resultados distintos al valor instantáneo de una variable G01D 1/00). › que influyen en las características de pulsos o trenes de pulsos; que generan pulsos o trenes de pulsos.
- G05B19/414 G […] › G05 CONTROL; REGULACION. › G05B SISTEMAS DE CONTROL O DE REGULACION EN GENERAL; ELEMENTOS FUNCIONALES DE TALES SISTEMAS; DISPOSITIVOS DE MONITORIZACION O ENSAYOS DE TALES SISTEMAS O ELEMENTOS (dispositivos de maniobra por presión de fluido o sistemas que funcionan por medio de fluidos en general F15B; dispositivos obturadores en sí F16K; caracterizados por particularidades mecánicas solamente G05G; elementos sensibles, ver las subclases apropiadas, p. ej. G12B, las subclases de G01, H01; elementos de corrección, ver las subclases apropiadas, p. ej. H02K). › G05B 19/00 Sistemas de control por programa (aplicaciones específicas, ver los lugares apropiados, p. ej. A47L 15/46; relojes que implican medios anejos o incorporados que permiten hacer funcionar un dispositivo cualquiera en un momento elegido de antemano o después de un intervalo de tiempo predeterminado G04C 23/00; marcado o lectura de soportes de registro con una información digital G06K; registro de información G11; interruptores horarios o de programa horario que se paran automáticamente cuando el programa se ha realizado H01H 43/00). › Estructura del sistema de control, p. ej. controlador común o sistema multiprocesador, interfaz hacia el servocontrolador, controlador de interfaz programable.
- H02P9/00 ELECTRICIDAD. › H02 PRODUCCION, CONVERSION O DISTRIBUCION DE LA ENERGIA ELECTRICA. › H02P CONTROL O REGULACION DE MOTORES ELÉCTRICOS, GENERADORES ELECTRICOS O CONVERTIDORES DINAMOELECTRICOS; CONTROL DE TRANSFORMADORES, REACTANCIAS O BOBINAS DE CHOQUE. › Disposiciones para el control de generadores eléctricos con el propósito de obtener las características deseadas en la salida.
- H03M1/10 H […] › H03 CIRCUITOS ELECTRONICOS BASICOS. › H03M CODIFICACION, DECODIFICACION O CONVERSION DE CODIGO, EN GENERAL (por medio de fluidos F15C 4/00; convertidores ópticos analógico/digitales G02F 7/00; codificación, decodificación o conversión de código especialmente adaptada a aplicaciones particulares, ver las subclases apropiadas, p. ej. G01D, G01R, G06F, G06T, G09G, G10L, G11B, G11C, H04B, H04L, H04M, H04N; cifrado o descifrado para la criptografía o para otros fines que implican la necesidad de secreto G09C). › H03M 1/00 Conversión analógica/digital; Conversión digital/analógica (conversión de valores analógicos en, o a partir de una modulación diferencial H03M 3/00). › Calibración o ensayos.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
PDF original: ES-2369437_T3.pdf
Fragmento de la descripción:
Sistema de generador con procesamiento inteligente de señal de posición Campo de la invención La presente invención se refiere al campo de sistemas de generadores eléctricos, tales como sistemas de generadores para turbinas eólicas. Más específicamente, la invención se refiere a un sistema de generador con un procesamiento inteligente de una señal de posición que indica la posición angular del rotor de generador.
Antecedentes de la invención
Para una turbina eólica dispuesta para generar potencia eléctrica a una red eléctrica, la eficacia de potencia es un parámetro crucial. Para proporcionar una alta eficacia de potencia la turbina eólica debe conectarse a la red eléctrica con tan pocos acontecimientos de parada como sea posible.
Una fuente conocida de error que provoca la parada de la turbina eólica es la detección de posición o codificación de posición del rotor del generador de potencia. Por ejemplo los generadores de tipo inducción de doble alimentación requieren una detección precisa de posición angular del rotor de generador, por ejemplo dentro de +/-1º, para que los sistemas de controle combinen las señales de potencia eléctrica desde el generador hasta la red eléctrica para un suministro de potencia eléctrica fiable y suave a la red eléctrica. Incluso los errores a corto plazo o ninguna señal de posición pueden dar como resultado paradas de emergencia del sistema de generador debido a altas corrientes, dando así como resultado una mala eficacia de potencia global de la turbina eólica. Además, incluso errores menores en la señal de posición pueden provocar picos de voltaje involuntarios del sistema de generador reduciendo así la calidad en la potencia eléctrica suministrada a la red eléctrica.
Se sabe que los dispositivos de detección de posición, a menudo indicados codificadores de posición, producen eventualmente errores en sus señales de posición de salida. Además, tales dispositivos están a menudo conectados mecánicamente al árbol del generador y por tanto incluyen partes que se desplazan a la velocidad del árbol de generador, por ejemplo 1500 rpm o más. Por consiguiente, los cojinetes, etc. de los codificadores de posición tienen una vida útil limitada, y por tanto la detección temprana de problemas con el codificador de posición es vital con respecto a evitar un daño completo del codificador de posición, que parará la turbina eólica hasta que se sustituya el codificador de posición.
También es posible calcular una posición angular del rotor basándose solamente en las señales de salida eléctricas del generador y la red eléctrica a la que el generador suministra potencia. Esto elimina la necesidad de un codificador de posición mecánico. Sin embargo, tales cálculos son complejos y requieren una gran cantidad de poder de procesamiento. Además, si el voltaje es bajo en la red eléctrica, entonces los valores calculados no son fiables, y a voltaje nulo en la red eléctrica el cálculo no es posible.
El documento US 2008/0300820 A1 da a conocer un sistema para estimar una posición angular y una velocidad angular de un rotor en una máquina dinamoeléctrica. Un microprocesador recibe una entrada de voltaje trifásico y una entrada de corriente trifásica desde el generador de potencia eléctrica. Un estimador de posición y velocidad implementado en el microprocesador calcula en respuesta a una velocidad y posición angular del rotor de generador de potencia eléctrica sin la necesidad de contacto mecánico con el árbol de rotor.
El documento EP 1 341 311 A2 da a conocer un aparato de procesamiento de señales para un codificador, por ejemplo como un codificador giratorio tal como se usa para detectar una posición rotacional de un motor de una herramienta de máquina tal como un dispositivo de control numérico, una escala lineal para detectar la posición de movimiento lineal de una tabla, etc.
Sumario de la invención
Por tanto, según la descripción anterior, un objeto de la presente invención es proporcionar un sistema de generador de potencia eléctrica que pueda proporcionar una gestión mejorada de la señal de posición recibida del codificador de posición, para permitir un funcionamiento más fiable del sistema de generador con una cantidad reducida de paradas.
En un primer aspecto, la invención proporciona un sistema de generador de potencia eléctrica según la reivindicación 1 adjunta.
Puesto que tal sistema de generador proporciona una posición angular procesada teniendo en cuenta tanto la posición angular calculada basándose en la última señal de posición del codificador de posición como basándose en entradas de posición anteriores, tal posición angular procesada será más fiable que una posición angular basada en un cálculo directo basándose en una única señal de posición del codificador de posición. Por tanto, la posición angular procesada es menos vulnerable a errores en la señal de posición recibida del codificador de posición.
Debido a la posición angular estimada es posible detectar errores en la señal de posición y en algún grado también corregir tales errores, e incluso en casos en los que el codificador de posición deja de funcionar durante un corto periodo, puede ser posible proporcionar un algoritmo de control de manera que la posición angular procesada sea suficientemente fiable para mantener un funcionamiento normal del sistema de generador de potencia basándose completamente en la posición angular estimada en tal periodo. A continuación se describirán maneras más específicas de calcular y utilizar la posición angular estimada para dar como resultado una posición angular procesada más fiable.
Los sistemas de generadores, por ejemplo generadores de tipo inducción de doble alimentación, cuya función de generación de potencia depende de un conocimiento preciso de la posición de rotor, se verán menos influidos por errores en el codificador de posición que de otro modo pueden provocar una mala calidad eléctrica o paradas de emergencia, e incluso en el caso de un fallo permanente del codificador de posición, el sistema tendrá tiempo de pararse de una manera controlada sin la necesidad de paradas de emergencia.
Según lo anterior, el sistema de generador según el primer aspecto es altamente adecuado para turbinas eólicas y otros generadores de potencia en los que el funcionamiento fiable y alta eficacia de potencia son parámetros cruciales. Pueden reducirse los periodos en los que la turbina eólica deja de producir potencia eléctrica debido a problemas del codificador de posición. Puesto que la mayoría de los sistemas de generadores modernos incluyen un procesador de señales digitales, el procesamiento necesario de la señal de posición puede ejecutarse completamente en el software que se ejecuta en tal procesador. Sin embargo, el procesamiento o parte de éste también puede involucrar componentes de procesamiento analógico, si se prefiere.
A continuación, se describirán realizaciones preferidas, especialmente con respecto a las realizaciones del algoritmo de control predeterminado.
El procesador incluye una unidad de corrección dispuesta para detectar y corregir tipos de errores predeterminados en la señal de posición antes de calcular la posición angular, realizando así un filtrado previo de la señal de posición que pretende eliminar tipos de errores temporales conocidos en la señal de posición del codificador de posición. De ese modo la señal de posición angular calculada basándose en la señal de posición corregida se vuelve más fiable, y puede evitarse la parada del sistema de generador debido a tipos de errores temporales conocidos. Especialmente, los errores pueden corregirse basándose en una propiedad almacenada anteriormente del codificador de posición, tal como su resolución angular, utilizando así información redundante en la señal de posición recibida desde el codificador de posición. También pueden corregirse errores basándose en una propiedad almacenada anteriormente del generador de potencia, tal como su máxima aceleración angular posible, permitiendo así el rechazo de valores en la señal de posición que parecen reflejar una aceleración angular que no es físicamente posible para el generador específico. La corrección de errores en la señal de posición incluye preferiblemente uno o más de: 1) eliminación de un pico que puede provocarse por un ruido eléctrico o un bit de “suspensión” en una parte digital del sistema, 2) eliminación de desplazamiento de valor que puede provocarse por uno o más... [Seguir leyendo]
Reivindicaciones:
1. Sistema de generador de potencia eléctrica que incluye
- un generador de potencia (GEN) que incluye un rotor impulsado por un árbol,
- un procesador (DSP) dispuesto
- para calcular una posición angular (AP) en respuesta a una señal de posición (PS) que representa una posición angular del rotor,
- para calcular una posición angular estimada (EAP) basándose en señales de posición recibidas anteriormente, y
- para generar una posición angular procesada (PAP) basándose en comparar la posición angular (AP) calculada y la posición angular estimada (EAP) ,
caracterizado porque el sistema comprende un codificador de posición (ENC) dispuesto para detectar la posición angular del rotor a través de una conexión mecánica al árbol, y para generar dicha señal de posición (PS) , y porque el procesador (DSP) incluye una unidad de corrección (CORR) dispuesta para detectar y corregir tipos de errores predeterminados en la señal de posición (PS) antes de calcular la posición angular (AP) , en el que el procesador (DSP) está dispuesto para corregir la señal de posición (PS) basándose en una propiedad almacenada anteriormente de al menos uno de: el codificador de posición (ENC) , y el generador de potencia (GEN) .
2. Sistema según la reivindicación 1, en el que el procesador (DSP) está dispuesto para corregir la señal de posición (PS) basándose en una resolución angular del codificador de posición (ENC) .
3. Sistema según la reivindicación 1 ó 2, en el que el procesador (DSP) está dispuesto para corregir la señal de posición (PS) basándose en una posible aceleración máxima del generador de potencia (GEN) .
4. Sistema según cualquiera de las reivindicaciones anteriores, en el que la corrección de errores en la señal de posición (PS) incluye al menos uno de: eliminación de un pico (E1) , eliminación de desplazamiento de valor (E2) , limitación de aceleración angular que supera un valor predeterminado (E3) , y compensación de número inesperado de impulsos por revolución (E4, E5) .
5. Sistema según cualquiera de las reivindicaciones anteriores, en el que el procesador (DSP) incluye una unidad de estimación (EST) que incluye un bucle de enganche de fase (PLL) , en el que la unidad de estimación (EST) genera la posición angular estimada (EAP) basándose en entradas de posición angular anteriores (EI) .
6. Sistema según la reivindicación 5, en el que el procesador (DSP) está dispuesto para seleccionar aplicar la posición angular (AP) o la posición angular estimada (EAP) como entrada (EI) a la unidad de estimación (EST) .
7. Sistema según la reivindicación 5 ó 6, en el que la posición angular procesada (PAP) es una salida del bucle de enganche de fase (PLL) .
8. Sistema según cualquiera de las reivindicaciones anteriores, en el que la posición angular estimada (EAP) se calcula a partir de la posición angular procesada (PAP) mediante un algoritmo de extrapolación (EX) .
9. Sistema según la reivindicación 8, en el que el algoritmo de extrapolación (EX) se basa en asumir una velocidad angular constante del rotor.
10. Sistema según cualquiera de las reivindicaciones anteriores 6-9, en el que el procesador (DSP) incluye una unidad de gestión de errores (EHU) dispuesta para detectar un error basándose en comparar la posición angular (AP) y la posición angular estimada (EAP) , y en el que la unidad de gestión de errores (EHU) selecciona aplicar la posición angular estimada (EAP) como entrada (EI) a la unidad de estimación (EST) en caso de detectarse un error.
11. Sistema según la reivindicación 10, en el que la unidad de gestión de errores (EHU) está dispuesta para detectar un error en caso de que una diferencia entre la posición angular (AP) y la posición angular estimada (EAP) supere un valor predeterminado.
12. Sistema según la reivindicación 10 u 11, en el que la unidad de gestión de errores (EHU) está dispuesta para seleccionar emitir la posición angular estimada (EAP) como la posición angular procesada (PAP) en caso de detectarse un error.
13. Sistema según cualquiera de las reivindicaciones 10-12, en el que la unidad de gestión de errores (EHU) está dispuesta para generar una señal de error (ERRS) , indicando que hay un error en el codificador de posición (ENC) , tal como para generar la señal de error (ERRS) después de detectar un número de errores predeterminado durante un periodo de tiempo predeterminado.
14. Sistema según cualquiera de las reivindicaciones anteriores, en el que la señal de posición (PS) generada por el codificador de posición (ENC) es una señal de posición digital de tres hilos (A, B, Z) , tal como la señal de posición (PS) que se muestrea a una frecuencia de muestreo de al menos 2 kHz, tal como a una frecuencia de muestreo de 5 kHz.
15. Sistema según cualquiera de las reivindicaciones anteriores, en el que el generador de potencia (GEN) es 10 un generador de inducción de doble alimentación.
16. Sistema según cualquiera de las reivindicaciones anteriores, que incluye además un sistema de control (CS) dispuesto para recibir la posición angular procesada (PAP) y para controlar por consiguiente al menos uno de: conexión eléctrica del generador de potencia (GEN) a una red eléctrica (EG) , y un nivel de vibración del generador de potencia (GEN) .
17. Sistema según la reivindicación 16, en el que el procesador está dispuesto para detectar un error en el codificador de posición (ENC) y para generar una señal de error (ERRS) por consiguiente, y en el que el sistema de control (CS) está dispuesto para iniciar un procedimiento de desconexión controlado de la red eléctrica (EG) en respuesta a la señal de error (ERRS) .
18. Turbina eólica que incluye un sistema de generador de potencia según cualquiera de las reivindicaciones 1
17, tal como una turbina eólica dispuesta para suministrar potencia eléctrica a una red eléctrica (EG) , y en la que la posición angular procesada (PAP) sirve para eliminar paradas de emergencia debido a un error en el codificador de posición (ENC) .
Patentes similares o relacionadas:
Compensación de deriva, del 20 de Noviembre de 2019, de Teledyne Signal Processing Devices Sweden AB: Un método asociado a un diseño de circuito eléctrico predefinido, en donde cada circuito eléctrico fabricado de acuerdo con el diseño de circuito […]
 Procedimiento y dispositivo para la conversión analógica-digital de señales, del 21 de Noviembre de 2013, de STAGE TEC ENTWICKLUNGSGESELLSCHAFT FUR PROFESSIONELLE AUDIOTECHNIK MBH: Procedimiento y dispositivo para la conversión analógica-digital de señales por medio de, como mínimo, dosconvertidores A/D (convertidores analógicos-digitales) […]
Procedimiento y dispositivo para la conversión analógica-digital de señales, del 21 de Noviembre de 2013, de STAGE TEC ENTWICKLUNGSGESELLSCHAFT FUR PROFESSIONELLE AUDIOTECHNIK MBH: Procedimiento y dispositivo para la conversión analógica-digital de señales por medio de, como mínimo, dosconvertidores A/D (convertidores analógicos-digitales) […]
 Procedimiento y dispositivo de corrección para la corrección de un error de offset de un convertidor de señal, del 1 de Agosto de 2013, de ROBERT BOSCH GMBH: Procedimiento para la corrección de un error de offset de un convertidor de señal , en donde elprocedimiento presenta los siguientes […]
Procedimiento y dispositivo de corrección para la corrección de un error de offset de un convertidor de señal, del 1 de Agosto de 2013, de ROBERT BOSCH GMBH: Procedimiento para la corrección de un error de offset de un convertidor de señal , en donde elprocedimiento presenta los siguientes […]
PROCEDIMIENTO ADAPTATIVO DE CALIBRACIÓN DÍGITAL CONCURRENTE DEL OFFSET EN COMPARADORES EN CONVERTIDORES ANALÓGICO-DIGITALES (ADCS), del 18 de Diciembre de 2012, de CONSEJO SUPERIOR DE INVESTIGACIONES CIENTIFICAS (CSIC): El objeto de la presente invención es un procedimiento adaptativo para la calibración del offset de comparadores en convertidores analógico-digitales […]
PROCEDIMIENTO ADAPTATIVO PARA LA ESTIMACIÓN DE LA INL EN CONVERTIDORES ANALÓGICO-DIGITALES (ADCS), del 3 de Diciembre de 2012, de CONSEJO SUPERIOR DE INVESTIGACIONES CIENTIFICAS (CSIC): Procedimiento adaptativo para la estimación de la INL en convertidores analógico-digitales (ADCs). Permite caracterizar y testar los convertidores analógico-digitales mediante […]
 EQUIPO DE DIAGNÓSTICO DE ALTAVOCES Y PROCEDIMIENTO DE UTILIZACIÓN DE ÉSTE MEDIANTE EL USO DE TRANSFORMADA WAVELET, del 24 de Julio de 2012, de UNIVERSITAT POLITECNICA DE CATALUNYA: Equipo de Diagnóstico de Altavoces y procedimiento de utilización de este mediante el uso de transformada Wavelet.
Técnica de detección de fallos o defectos debidos […]
EQUIPO DE DIAGNÓSTICO DE ALTAVOCES Y PROCEDIMIENTO DE UTILIZACIÓN DE ÉSTE MEDIANTE EL USO DE TRANSFORMADA WAVELET, del 24 de Julio de 2012, de UNIVERSITAT POLITECNICA DE CATALUNYA: Equipo de Diagnóstico de Altavoces y procedimiento de utilización de este mediante el uso de transformada Wavelet.
Técnica de detección de fallos o defectos debidos […]
CIRCUITO MULTIPLICADOR DE UN UNICO BIT CON FUNCION DE AJUSTE DE FASE, del 8 de Abril de 2011, de OSAKI ELECTRIC CO., LTD: Circuito multiplicador de un único bit con función de ajuste de fase.Aumenta la resolución del ajuste de fase. Incluye un elemento aritmético […]
EMPAREJAMIENTO DINAMICO DE ELEMENTOS PARA CONVERTIDORES A/D., del 16 de Marzo de 2007, de TELEFONAKTIEBOLAGET LM ERICSSON: Un método para un emparejamiento dinámico de elementos para un subconvertidor D/A de una etapa de convertidor A/D, caracterizado porque en ese dicho método se incluye el paso […]