SISTEMA DE ENTRENAMIENTO VIRTUAL PARA LA CIRUGÍA ARTROSCÓPICA.
Sistema de entrenamiento virtual para cirugía artroscópica, que comprende,
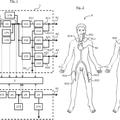
al menos:- una pieza guía (4 ) en T con brazos secundarios (41A y 41B) a los que se acoplan sendos grupos actuadores (9, 10, 11, 12), de movimiento codificado por codificadores de giro y desplazamiento lineal;- una guía (42A, 42B) en cada brazo secundario (41A, 41B);- sendos elementos deslizantes (5A, 5B) sobre las guías (42A, 42B), ajustables a distintas longitudes;- dos piezas puente (6A, 6B) articuladas respecto a los elementos deslizantes (5A, 5B) que incorporan un primer codificador de giro;- dos piezas (7) en L de transmisión de movimiento las piezas puente (6A, 6B) y el soporte (8) de cada grupo actuador, y que incorporan un segundo codificador de giro;- un soporte (8) con un orificio (38) para la inserción de una guía, que permite el desplazamiento axial del resto del grupo actuador
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P200803684.
Solicitante: UNIVERSIDAD REY JUAN CARLOS.
Nacionalidad solicitante: España.
Provincia: MADRID.
Inventor/es: SAN MARTIN LOPEZ,JOSE JAVIER.
Fecha de Solicitud: 23 de Diciembre de 2008.
Fecha de Publicación: .
Fecha de Concesión: 3 de Noviembre de 2011.
Clasificación PCT:
- G06F19/00
- G09B23/28 FISICA. › G09 ENSEÑANZA; CRIPTOGRAFIA; PRESENTACION; PUBLICIDAD; PRECINTOS. › G09B MATERIAL EDUCATIVO O DE DEMOSTRACION; MEDIOS DE ENSEÑANZA O DE COMUNICACION DESTINADOS A LOS CIEGOS, SORDOS O MUDOS; MODELOS; PLANETARIOS; GLOBOS; MAPAS GEOGRAFICOS; DIAGRAMAS. › G09B 23/00 Modelos para usos científicos, médicos o matemáticos, p. ej. dispositivos a escala real para la demostración (bajo forma de juguetes A63H). › para la medicina.
Fragmento de la descripción:
Sistema de entrenamiento virtual para cirugía artroscópica.
Objeto de la invención
La invención, tal como expresa el enunciado de la presente memoria descriptiva, se refiere a un sistema de entrenamiento virtual para cirugía artroscópica.
Más en particular, el objeto de la invención se centra en un sistema que simula las interacciones con un entorno virtual en operaciones de cirugía laparoscópica, donde la principal novedad que presenta es la simulación de técnicas que requieren una situación de actuadores enfrentados como, por ejemplo, la artroscopia de hombro.
La presente invención se refiere a un sistema háptico que permite la simulación de cualquier técnica de cirugía laparoscópica, además de permitir la simulación de técnicas de cirugía artroscópica que necesitan de grados de libertad adicionales que posibiliten el enfrentamiento de varios actuadores.
Campo de aplicación de la invención
El campo de aplicación de la presente invención se encuadra dentro del sector técnico de la industria dedicada a la fabricación de aparatos y dispositivos de entrenamiento virtual.
Antecedentes de la invención
Actualmente existen dispositivos hápticos dedicados a la simulación de cirugía laparoscópica con limitaciones estructurales que impiden la simulación de técnicas muy específicas, como diferentes artroscopias, sobre todo de hombro. Para técnicas como la artroscopia de rodilla o de hombro, existen entrenadores en los cuales se actúa sobre un modelo de rodilla o de hombro, en el cual se introducen a mano (sin un soporte estructural) los actuadores, realizándose su control de posición mediante sensores magnéticos. Sin embargo, con estos últimos no es posible realizar el entrenamiento de otras técnicas.
Esto supone una limitación importante en cuanto que hace de la cirugía virtual una alternativa o bien incompleta, dado que no se pueden adquirir todos los equipos específicos para rodilla, hombro, abdomen, etc., o bien excesivamente cara.
Por otra parte, existen simuladores hápticos de propósito general con una gran versatilidad para, en teoría, poder adaptar a cualquier disciplina aplicada. En este caso, la búsqueda de una excesiva generalidad limita la adaptación del dispositivo háptico a todas aquellas particularidades propias de la cirugía virtual, en cuanto a incorporar posibilidades de colocación, ergonomía o giro que proporcionen una opción más realista, así como actuadores específicos de los instrumentos de cirugía, dado que ello, por el contrario, limitaría la generalidad del dispositivo.
La función de los entrenadores, en cualquier caso, es que los médicos adquieran práctica en las operaciones laparoscópicas o artroscópicas.
Las operaciones o intervenciones artroscópicas se realizan sobre articulaciones (rodilla, hombro, etc.). La laparoscopia es una técnica de la endoscopia que permite la visión de la cavidad pélvica-abdominal con la ayuda de un tubo óptico. A través de una fibra óptica por un lado se transmite la luz para iluminar la cavidad, mientras que se observan las imágenes del interior con una cámara conectada a la misma fibra.
El mismo método permite intervenciones quirúrgicas, por lo que también se considera un sistema de cirugía de invasión mínima cuyo objeto es curar o corregir enfermedades. El aparato utilizado se llama laparoscopio y entra en el cuerpo a través de una pequeña incisión de entre dos y cinco centímetros.
Una artroscopia es un tipo, o derivado de la endoscopia. Es una visualización de una articulación, normalmente de la rodilla, con el fin de observar el menisco. Esto se logra con el uso de un artroscopio, un instrumento parecido al endoscopio, de menor longitud, y adaptado de cierta forma para ser más utilizable en una articulación. Existen dos formas de artroscopia: la quirúrgica y la diagnóstica.
El artroscopio puede estar equipado con distintas herramientas, de tal forma que sin necesidad de una operación invasiva, se puedan realizar correcciones en la articulación. En la quirúrgica, el artroscopio es implementado con herramientas y la finalidad de la intervención es hacer sanar o tratar una articulación. En la diagnóstica, el artroscopio solo está equipado con una cámara, ya que la finalidad de la intervención es hacer un diagnóstico, revisar el área u observar la zona para futuras operaciones de tipo invasivo.
Una de las dificultades de estas intervenciones, y que justifica el uso de estos entrenadores, es el hecho de que la información, acerca del interior del paciente que se está operando, se presenta en un monitor, tratándose por tanto de información en dos dimensiones, sin embargo, el cirujano está utilizando el instrumental dentro de un espacio tridimensional. La coordinación entre ambos entornos, es decir, la capacidad de interpretar la información en dos dimensiones de la pantalla mientras se actúa en el espacio real, supone en muchos casos un largo período de aprendizaje.
Se hace, por tanto, necesario un aparato que sirva tanto para la cirugía laparoscópica, donde los brazos del endoscopio son paralelos para realzar la intervención, como para artroscopia de rodilla u hombros donde estos brazos convergen. Además, debe servir tanto para niños como para personas mayores, permitiendo la regulación de la distancia entre ambos endoscopios, siendo estos los objetivos esenciales de la presente invención.
Sin embargo, por parte del solicitante, se desconoce la existencia de ningún otro sistema de entrenamiento virtual para cirugía artroscópica que presente unas características técnicas, estructurales o de configuración semejantes.
Explicación de la invención
El sistema de entrenamiento virtual para cirugía artroscópica, objeto de la presente invención, se encuentra a mitad de camino de las dos opciones descritas en el estado de la técnica. Por un lado, está adaptado a las características propias de un simulador de laparoscopia virtual, incluyendo, ventajosamente, la posibilidad de adaptar el campo de operación a una posición más natural de la técnica a simular. Por otra parte incorpora la innovadora opción de, con diferentes actuadores fácilmente intercambiables, simular técnicas de laparoscopia, o permitir cambiar de lado la cámara por el instrumental, práctica habitual en el transcurso de una intervención real.
Así, el sistema de entrenamiento virtual que la invención propone, se configura como una destacable novedad dentro de su campo de aplicación, estando los detalles caracterizadores que los distinguen, adecuadamente recogidos en las reivindicaciones finales que acompañan a la presente memoria descriptiva.
De forma concreta, el sistema objeto de la invención consiste en un dispositivo que simula las interacciones con un entorno virtual a través de la codificación de los movimiento de una pareja de grupos actuadores con que está dotado dicho dispositivo.
Esta codificación viene determinada por un conjunto de tres codificadores ópticos de giro y un codificador láser de desplazamiento lineal, previstos en cada grupo actuador. Los codificadores de giro son sensores ópticos que realizan una medición del ángulo recorrido por los ejes de cada actuador, mientras que el codificador de desplazamiento lineal, está constituido por un emisor láser, que mide el avance axial de todo el grupo actuador.
En cuanto al dispositivo, en el que se acoplan dichos grupos actuadores, comprende, al menos, un soporte principal de sustentación, constituido por una base y un brazo vertical, al que, por medio de un primer eje principal de unión, se acopla una guía soporte, permitiendo su giro hasta 90º.
Esta guía soporte, que adopta una configuración en T, permite el deslizamiento, en un plano horizontal, de los dos grupos actuadores acoplados en sus respectivos extremos, de tal forma que la distancia relativa entre dichos grupos es ajustable por el usuario, dando versatilidad al sistema entrenador, de acuerdo a la técnica de cirugía a simular.
Además, la unión de cada uno de los grupos actuadores con dicha pieza guía, se realiza mediante sendas piezas, que denominamos pieza puente, con capacidad de giro. El ángulo de giro de esta pieza puente, define una gama de posiciones del par de actuadores, permitiendo que el sistema entrenador, es decir, el dispositivo, se configure, fácilmente, para las necesidades de cada caso, para la intervención de laparoscopia general,...
Reivindicaciones:
1. Sistema de entrenamiento virtual para cirugía artroscópica, destinado a permitir la simulación de cualquier técnica de cirugía laparoscópica, además de la simulación de técnicas de cirugía artroscópica que necesitan de grados de libertad adicionales que posibiliten el enfrentamiento de varios actuadores, siendo del tipo que comprende un soporte principal, consistente en una base (2) y un brazo vertical (3), caracterizado por el hecho de comprender, al menos:
- una pieza guía (4) de configuración en T contando con un brazo central (41), mediante el que se une articuladamente al brazo vertical (3), y dos brazos secundarios (41A y 41B) en cuyos respectivos extremos se acoplan sendos grupos actuadores, cuyo movimiento está codificado por un conjunto de, al menos, tres codificadores de giro y un codificador de desplazamiento lineal, en cada grupo;
- una guía (42A, 42B) practicada en la superficie de cada uno de los brazos secundarios (41A, 41B) de la pieza guía (4);
- sendos elementos deslizantes (5A, 5B) dispuestos sobre cada tramo de guía (42A, 42B), ajustables sobre la misma, a distintas longitudes de ambos brazos de la guía (42A, 42B);
- dos piezas puente (6A, 6B) articuladas respecto a los elementos deslizantes (5A, 5B) mediante un eje tal que permita un ángulo de giro sobre el eje vertical del plano de sustentación, y en las que se aloja un primer codificador que recoge el giro del eje (36) que las une a la pieza (7) de transmisión de movimiento;
- dos piezas (7) de configuración en L o escuadra, de transmisión de movimiento entre cada una de las piezas puente (6A, 6B) y el soporte (8) de cada grupo actuador, y que cuentan con un segundo codificador que recoge el giro del eje (37) que las une al soporte (8) del grupo actuador;
- un soporte (8) en cada grupo actuador, que comprende un orificio (38) con una pluralidad de rebajes laterales (39), apto para la introducción en él de una guía, la cual permite el desplazamiento axial del resto del grupo actuador (9, 10, 11, 12), existiendo, en dicha guía, un codificador de desplazamiento lineal.
2. Sistema de entrenamiento virtual para cirugía artroscópica, según la reivindicación 1, caracterizado por el hecho de que el codificador de desplazamiento lineal, que registra el avance axial del actuador, es un sensor de desplazamiento láser que cuenta con un emisor y un receptor; y porque los codificadores de giro son sensores ópticos que realizan una medición del ángulo recorrido por los ejes de cada actuador.
3. Sistema de entrenamiento virtual para cirugía artroscópica, según la reivindicación 1, caracterizado por el hecho de que el giro de las piezas puente (6A y 6B) viene determinado por, al menos, seis posiciones prefijadas, con incrementos de 30º, por un pasador (50) entre la pieza puente (6A, 6B) y cada una de las ranuras u oquedades (51) practicadas en los elementos deslizantes (5A, 5B) a los que se acopla dicha pieza puente (6A, 6B).
4. Sistema de entrenamiento virtual para cirugía artroscópica, según la reivindicación 1, caracterizado por el hecho de que cada grupo actuador se compone de un soporte (8), que mediante el eje (37) lo une a las piezas (7) de transmisión de movimiento, y una guía de desplazamiento axial que atraviesa dicho soporte (8), así como, un primer actuador superior (9), un segundo actuador superior (10), un tercer actuador superior (11) y un actuador inferior (12); en que el primer actuador superior (9) realiza un movimiento de traslación a través de la guía insertada en el soporte (8), estando, además, unida al segundo actuador superior (10).
5. Sistema de entrenamiento virtual para cirugía artroscópica, según la reivindicación 4, caracterizado por el hecho de que el segundo actuador superior (10), aloja el tercer codificador óptico de giro en un hueco previsto para tal fin; y porque, está unido al tercer actuador superior (11), que es el permite el giro del actuador inferior (12) en torno a su eje axial y que se inserta en un orificio previsto en él para tal fin.
6. Sistema de entrenamiento virtual para cirugía artroscópica, según las reivindicaciones anteriores, caracterizado por el hecho de que el actuador inferior (12) es apto para acoplársele diferentes herramientas intercambiables, que representan a los diferentes instrumentos utilizados en cirugía laparoscópica.
7. Sistema de entrenamiento virtual para cirugía artroscópica, según las reivindicaciones anteriores, caracterizado por el hecho de que se interconecta a un sistema de control, constituido, por ejemplo, por un ordenador personal o cualquier otro elemento análogo adecuado, comprendiendo:
- unos medios de control apropiados, de tal forma que permitan la visualización y el control de las diferentes señales de posición que comunican cada uno de los codificadores;
- un sistema de detección de averías, facilitando información de errores y del estado del sistema; y
- una pantalla digital que informa de los mensajes de estado que envían los medios de control, además de informar de los estados básicos de funcionamiento y error.
Patentes similares o relacionadas:
Dispositivos y métodos para la administración y mezclado de fármacos, y capacitación en técnicas apropiadas para los mismos, del 22 de Julio de 2020, de JANSSEN PHARMACEUTICA NV: Un dispositivo para capacitar o ayudar a los usuarios en un mezclado apropiado de componentes farmacéuticos, el dispositivo comprendiendo: una carcasa […]
ELEMENTO TATUABLE PARA PARA ORNAMENTAR OBJETOS DE MODA O DECORACIÓN Y EXTREMIDADES HUMANAS, del 18 de Junio de 2020, de DRAMMEH MORA, Eddi: Elemento tatuadle para ornamentar objetos de moda o decoración y las extremidades del cuerpo humano, que comprende una capa de polímero apta para ser tatuadle […]
Sistema de entrenamiento en desfibrilación, del 13 de Mayo de 2020, de LAERDAL MEDICAL AS: Un sistema de entrenamiento en desfibrilación, que permite el uso de una unidad de desfibrilación con corriente , que comprende un módulo y un cable que interconecta […]
APARATO DE SIMULACIÓN PARA CIRUGÍA LAPAROSCÓPICA, del 23 de Abril de 2020, de SERVICIO CÁNTABRO DE SALUD: 1. Aparato de simulación para cirugía laparoscópica para entrenamiento de cirujanos destinado a ser introducido dentro de una máquina de simulación […]
 Simulador médico-quirúrgico y procedimiento de simulación médico-quirúrgica, del 26 de Febrero de 2020, de CENTRE NATIONAL DE LA RECHERCHE SCIENTIFIQUE: Simulador médico-quirúrgico que comprende:
- un dispositivo de vascularización establecido para vascularizar un circuito cardiovascular, comprendiendo […]
Simulador médico-quirúrgico y procedimiento de simulación médico-quirúrgica, del 26 de Febrero de 2020, de CENTRE NATIONAL DE LA RECHERCHE SCIENTIFIQUE: Simulador médico-quirúrgico que comprende:
- un dispositivo de vascularización establecido para vascularizar un circuito cardiovascular, comprendiendo […]
Sistemas, aparatos y procedimientos para simuladores de pacientes, del 19 de Febrero de 2020, de BOARD OF REGENTS THE UNIVERSITY OF TEXAS SYSTEM: Un simulador abdominal que comprende: un alojamiento que simula al menos el abdomen de un paciente, comprendiendo el alojamiento: una capa […]
Modelo avanzado de primera entrada para simulación quirúrgica, del 19 de Febrero de 2020, de APPLIED MEDICAL RESOURCES CORPORATION: Un dispositivo de entrenamiento quirúrgico , que comprende: una estructura de tejido simulado penetrable que tiene una superficie superior […]
QL BLOCK TRAINER - SIMULADOR PARA BLOQUEO ECOGUÍADO DEL PLANO MUSCULAR CUADRADO LUMBAR, del 13 de Febrero de 2020, de MEDICAL PHANTOM SAS: La invención pertenece al campo de la física aplicada a tecnología médica relacionada con un simulador para aplicación de anestesia por bloqueo selectivo de una […]