SISTEMA DE CONTROL DE UN VEHICULO SUBMARINO AUTONOMO.
Sistema de control de un vehículo submarino autónomo.La invención se refiere a un sistema (10) de control de un vehículo submarino autónomo que comprende una arquitectura de control neuronal (11,
12, 13) para actuar sobre los medios (14) de propulsión del vehículo submarino, comprendiendo dicha arquitectura de control neuronal al menos un modelo neuronal auto-organizativo para la coordinación senso-motor de inspiración biológica.De este modo, el sistema de control para vehículos submarinos de acuerdo con la invención cumple con los requisitos generales de dichos sistemas: por ejemplo un buen control del vehículo
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P200900645.
Solicitante: UNIVERSIDAD POLITECNICA DE CARTAGENA.
Nacionalidad solicitante: España.
Provincia: MURCIA.
Inventor/es: GUERRERO GONZALEZ,ANTONIO, RAMOS LAGE,CIPRIANO.
Fecha de Solicitud: 6 de Marzo de 2009.
Fecha de Publicación: .
Fecha de Concesión: 11 de Mayo de 2011.
Clasificación Internacional de Patentes:
- B25J9/16C3
- G05B13/02C1
- G06N7/04 FISICA. › G06 CALCULO; CONTEO. › G06N SISTEMAS DE COMPUTADORES BASADOS EN MODELOS DE CALCULO ESPECIFICOS. › G06N 7/00 Sistemas de computadores basados en modelos matemáticos específicos. › Realización física.
Clasificación PCT:
- B25J9/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › Manipuladores de control programado.
- G05B13/02 G […] › G05 CONTROL; REGULACION. › G05B SISTEMAS DE CONTROL O DE REGULACION EN GENERAL; ELEMENTOS FUNCIONALES DE TALES SISTEMAS; DISPOSITIVOS DE MONITORIZACION O ENSAYOS DE TALES SISTEMAS O ELEMENTOS (dispositivos de maniobra por presión de fluido o sistemas que funcionan por medio de fluidos en general F15B; dispositivos obturadores en sí F16K; caracterizados por particularidades mecánicas solamente G05G; elementos sensibles, ver las subclases apropiadas, p. ej. G12B, las subclases de G01, H01; elementos de corrección, ver las subclases apropiadas, p. ej. H02K). › G05B 13/00 Sistemas de control adaptativos, es decir, sistemas que se regulan a sí mismos para obtener un rendimiento óptimo siguiendo un criterio predeterminado (G05B 19/00 tiene prioridad; aprendizaje automático G06N 20/00). › eléctricos.
- G05B19/18 G05B […] › G05B 19/00 Sistemas de control por programa (aplicaciones específicas, ver los lugares apropiados, p. ej. A47L 15/46; relojes que implican medios anejos o incorporados que permiten hacer funcionar un dispositivo cualquiera en un momento elegido de antemano o después de un intervalo de tiempo predeterminado G04C 23/00; marcado o lectura de soportes de registro con una información digital G06K; registro de información G11; interruptores horarios o de programa horario que se paran automáticamente cuando el programa se ha realizado H01H 43/00). › Control numérico (NC), es decir, máquinas que funcionan automáticamente, en particular máquinas herramientas, p. ej. en un entorno de fabricación industrial, para efectuar un posicionamiento, un movimiento o acciones coordinadas por medio de datos de un programa en forma numérica (G05B 19/418 tiene prioridad).
Fragmento de la descripción:
Sistema de control de un vehículo submarino autónomo.
La presente invención se refiere a un sistema de control de un vehículo submarino autónomo que comprende una arquitectura de control neuronal para actuar sobre los medios de propulsión del vehículo submarino. Más concretamente, la invención se refiere a un sistema de control de un vehículo submarino no tripulado que presenta las características de auto-sintonizarse y de auto-calibrarse, las cuales proporcionan al vehículo submarino la capacidad para llevar a cabo tareas de inspección y maniobra (guiado) de forma autónoma. Además, el sistema puede adaptarse con facilidad a tareas específicas como, por ejemplo, el desplazamiento de cargas a localizaciones específicas o el transporte de sensorización especializada para el análisis del medio marino.
Antecedentes de la invención
Debido a la dinámica no-lineal de un vehículo submarino autónomo (AUV - Autonomous Underwater Vehicle) y a la dificultad de modelar el entorno y su interacción con el AUV (es decir, el hecho de controlar un AUV en un entorno no estructurado e incierto como puede ser el fondo marino), presenta una importante problemática de control.
Uno de los sistemas de control de AUV pioneros fue desarrollado por Yoerger y Slotine [D. N. Yoerger and J. E. Slotine, "Robust trajectory control of underwater vehicles", IEEE J. Oceanic Eng., vol. OE-10, pp. 462-470, Sept. 1985]. Yoerger y Slotine idearon un controlador de modo deslizante e investigaron los efectos de incertidumbre de los coeficientes hidrodinámicos y los términos de acoplamiento cruzado. El resultado mostró que el controlador de modo deslizante adaptativo presentaba mejores prestaciones que un controlador lineal convencional, a un amplio rango de velocidades.
Más recientemente, Fossen y Blanke [T. I. Fossen and M. Blanke, "Nonlinear output feedback control of underwater vehicle propellers using feedback from estimated axial flow velocity", IEEE J. Oceanic Eng., vol. 25, pp. 241-255, Apr. 2000] derivaron un controlador de realimentación de salida utilizando la teoría de control no-lineal y de realimentación de la velocidad del agua axial. Básicamente, pudieron demostrar que un observador no-lineal combinado con un controlador integral de realimentación de salida proporciona la estabilidad exponencial.
Healey y Lienard [A. J. Healey and D. Lienard, "Multivariable sliding mode control for autonomous diving and steering of unmanned underwater vehicles", IEEE J. Oceanic Eng., vol. 18, pp. 327-339, July 1993] diseñaron un controlador de modo deslizante para un control de un AUV de seis-grado-de-libertad (DOF). Principalmente, descompusieron el sistema en sub-sistemas no entrelazados y ciertas funciones importantes agrupadas para las funciones separadas de pilotar, sumergir y controlar la velocidad.
Choi y Yuh [S. K. Choi and J. Yuh, "Experimental study on a learning control system with bound estimation for underwater vehicles", in Underwater Robots, J. Yuh, T. Ura, and G. A. Bekey, Eds. Norwelll, MA: Kluwer, 1996, pp. 113-120] desarrollaron un controlador adaptativo basado en la estimación limitada y la implantación de esta para el control de un AUV.
Destacable fue el trabajo realizado por Yuh [J. Yuh, "A neural net controller for underwater robotic vehicles", IEEE Journal of Oceanic Engineering, vol. 15, nº 3, pp. 161-166, July 1990], que describió un sistema de control de un AUV basado en un controlador de red o modelo neuronal, cuya robustez con respecto al comportamiento dinámico no lineal y a las incertidumbres de los parámetros fue investigada por simulación por ordenador. Los resultados mostraron la fiabilidad del uso de las redes neuronales para controlar los AUV, con la presencia de cambios imprevisibles en la dinámica del vehículo y su entorno.
Siguiendo el mismo camino, Ishii et al. [K. Ishii, T. Fujii, and T. Ura, "An on-line adaptation method in a neural network-based control system for AUVs", IEEE J. Oceanic Eng. Vol. 20, pp. 221-228, July 1995] propusieron un controlador basado en redes neuronales asociado con un método de adaptación referenciado como "Entrenamiento Imaginario", para el control de un AUV llamado "Twin-Burger".
Anteriormente, Venugopal et al. [K. P. Venugopal, R. Sudhakar, and A. S. Pandya, "On-line learning control of autonomous underwater vehicles using feedforward neural networks", IEEE Journal Of Oceanic Engineering, vol. 17, nº 4, pp. 308-319, october 1992] habían propuesto un sistema de control de un AUV que utilizaba redes neuronales de propagación hacia atrás (feedback).
Puesto que los robots submarinos (entre los que destacan los AUV) requieren de un control y guiado adecuados para desarrollar tareas útiles, la información visual es importante para esas tareas y el control servo-visual es un procedimiento a partir del cual se puede obtener el guiado. Para coordinar y controlar modelos complejos se pueden usar unas procedimientos de aprendizaje conexionistas. El aprendizaje por refuerzo utiliza una señal de recompensa, así como mucha interacción con el entorno para formar una política correcta de comportamiento. Por tanto, es posible controlar un AUV combinando el guiado basado en la visión con un neuro-controlador entrenado por un aprendizaje de refuerzo.
Los sistemas neurodifusos son redes conexionistas de múltiples capas que realizan las funciones y elementos de los sistemas de decisión/control de lógica difusa tradicional. Un sistema neurodifuso entrenado es un sistema de lógica difusa, y el conocimiento de la regla difusa "si ... entonces" puede ser explícitamente extraído e interpretado de la red. Wang y Lee [J. S. Wang, C. S. G. Lee, and J. Yuh, "An on-line self-organizing neurofuzzy control for autonomous underwater vehicles", IEEE Trans. Robotics and Automation, vol. 19, nº 2, pp. 283-295, Apr. 2003] desarrollaron una estructura de control neurodifuso recurrente y un algoritmo de aprendizaje auto-adaptable como un controlador neuronal de propagación hacia atrás y un controlador PD como un controlador de realimentación para controlar a un AUV.
Sin un conocimiento a priori, el sistema neurodifuso recurrente es entrenado para modelar la dinámica inversa del AUV y usado como un controlador de propagación hacia atrás. Dicho controlador minimiza los efectos no-lineales de la dinámica del AUV a lo largo de una trayectoria deseada. El controlador proporcional plus derivativo (PD) es usado como un controlador realimentado para calcular el error de par y minimizar el error de trayectoria del AUV.
Son conocidos también controladores neurodifusos que comprenden una red neuronal basada en las funciones de pertenencias difusas modificadas. Dicha arquitectura de control combina las ventajas de la lógica difusa y las redes neuronales, tales como la capacidad de inferencia y la adaptación de la experiencia de los operadores humanos con lógica difusa y la capacidad de aprendizaje y la aproximación universal con redes neuronales.
Por otro lado, son conocidos en el estado de la técnica modelos neuronales inspirados en la neurobiología.
Los seres vivos son máquinas complejas, dotadas de una gran variedad de instrumentos de medición, de análisis, de recepción de estímulos y de reacción y respuesta. Los cinco sentidos, esas ventanas que nos conectan con el mundo exterior y a través de las cuales percibimos importante información sobre todo cuanto nos rodea, nos permiten ejercer nuestra capacidad de selección en el proceso de la información. Así, a un ser humano no le cuesta ningún esfuerzo identificar y evaluar las cosas por medio de sus percepciones sensoriales en combinación con su memoria. La vista, el oído, el olfato, etc. trabajando por separado o en combinación constituyen literalmente nuestra conexión con el mundo, una conexión que se erige como el gran misterio a desvelar por la ciencia actual.
Crear máquinas que se parezcan a cerebros humanos, capacitadas para observar un comportamiento inteligente, es el campo de investigación de la robótica y la inteligencia artificial (AI). Dentro de ese comportamiento inteligente se encuentran tanto las actividades relacionadas con el raciocinio, es decir, planeamiento y estrategia, como con la percepción y reconocimiento de imágenes, sonidos, etc.
Así, las llamadas tecnologías bio-inspiradas nacen de la aplicación de conceptos...
Reivindicaciones:
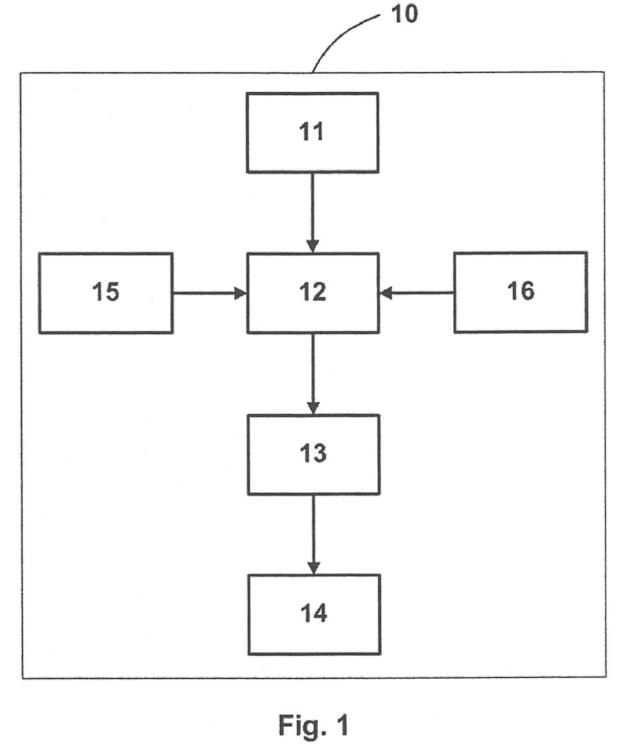
1. Sistema (10) de control de un vehículo submarino autónomo que comprende una arquitectura de control neuronal (11, 12, 13), caracterizado porque comprende, al menos:
un módulo de planificación global (11); un módulo de generación de rutas (12) que recibe datos del módulo de planificación (11), de un módulo de navegación (15) y de un módulo sensorial (16); y un módulo de control (13) que recibe los datos del módulo de generación de rutas (12);
comprendiendo esta arquitectura de control neuronal (11, 12, 13),al menos, un modelo neuronal auto-organizativo para la coordinación senso-motor de inspiración biológica, estando además configurado para que tanto el módulo de planificación (11), como el módulo de navegación (15), como el módulos sensorial (16) generen datos para que el módulo de generación de rutas (12) genere una ruta que, transmitida al módulo de control (13) actúe sobre los medios de propulsión (14) del vehículo submarino, y provoque el movimiento del mismo según la ruta calculada.
2. Sistema (10) según la reivindicación 1, caracterizado por el hecho que el modelo neuronal auto-organizativo para la coordinación senso-motor de inspiración biológica comprende al menos uno de los siguientes algoritmos: VAM, AVITE, DIRECT, FLETE o CEREBELLUM.
3. Sistema (10) según cualquiera de las reivindicaciones 1 ó 2, caracterizado por el hecho de que la arquitectura de control neuronal comprende medios configurados para auto-ajustar el sistema, auto-sintonizándolo y auto-calibrándolo, en donde dicho ajuste está basado en una pluralidad de ciclos de acción y reacción, aprendiendo la correlación entre los sensores y actuadores que conforman el módulo sensorial (16), y ajustando los módulos de generación de rutas (12) y de navegación (15).
4. Sistema (10) según cualquiera de las reivindicaciones 1 a 3, caracterizado por el hecho de que comprende medios configurados para capturar los datos procedentes de, al menos, un dispositivo sensorial/actuador integrado en el vehículo submarino.
5. Sistema (10) según cualquiera de las reivindicaciones 1 a 4, caracterizado porque el módulo de navegación (15) está configurado para el control del posicionamiento del vehículo submarino.
6. Sistema (10) según cualquiera de las reivindicaciones 1 a 5, caracterizado por el hecho de que comprende un módulo (12) de generación de trayectorias del vehículo submarino, configurado para la generación de una ruta en base a los datos recibidos por los módulos de planificación (11), navegación (15) y sensorial (16).
Patentes similares o relacionadas:
 SISTEMA DE MONITORIZACION Y CONTROL DE PROCESOS DE TRATAMIENTO TERMICO SUPERFICIAL DE MATERIALES CON LASER MEDIANTE UN CONTROL NEURONAL ADAPTATIVO MEDIANTE MODELO DE REFERENCIA, del 16 de Diciembre de 2008, de UNIVERSIDAD POLITECNICA DE MADRID: Sistema de monitorización y control de procesos de tratamiento térmico superficial de materiales con láser mediante un control neuronal adaptativo […]
SISTEMA DE MONITORIZACION Y CONTROL DE PROCESOS DE TRATAMIENTO TERMICO SUPERFICIAL DE MATERIALES CON LASER MEDIANTE UN CONTROL NEURONAL ADAPTATIVO MEDIANTE MODELO DE REFERENCIA, del 16 de Diciembre de 2008, de UNIVERSIDAD POLITECNICA DE MADRID: Sistema de monitorización y control de procesos de tratamiento térmico superficial de materiales con láser mediante un control neuronal adaptativo […]
Puesta en servicio automática de controlador para convertidores electrónicos de potencia activos trifásicos, del 1 de Julio de 2020, de OTIS ELEVATOR COMPANY: Un sistema para modular un nivel de corriente de salida de un convertidor de potencia bidireccional conectado a una red para garantizar que se proporcione […]
 Sistema de control, del 29 de Abril de 2020, de COVENTRY UNIVERSITY: Un sistema de control para controlar una instalación , comprendiendo el sistema de control un bucle de retroalimentación que incluye un integrador […]
Sistema de control, del 29 de Abril de 2020, de COVENTRY UNIVERSITY: Un sistema de control para controlar una instalación , comprendiendo el sistema de control un bucle de retroalimentación que incluye un integrador […]
Procedimiento y aparato de administración de energía eléctrica y dispositivo electrónico, del 1 de Enero de 2020, de Guangdong OPPO Mobile Telecommunications Corp., Ltd: Un procedimiento de administración de energía eléctrica, aplicado en un dispositivo electrónico cargado por un adaptador de alimentación eléctrica […]
MÉTODO DE CONTROL DE UN CONVERTIDOR ELECTRÓNICO CC/CA TRIFÁSICO CON FALLO EN UNA FASE, del 19 de Diciembre de 2019, de UNIVERSIDAD POLITECNICA DE MADRID: Método de control de un convertidor electrónico CC/CA trifásico con fallo en una fase. Se divulga un método de control de un convertidor electrónico de CC/CA trifásico […]
Método y sistema de refrigeración redundante, del 5 de Diciembre de 2019, de Dawes, Warwick Graham Andrew: Un método para implementar un sistema de refrigeración redundante para proporcionar una carga de refrigeración máxima predeterminada para el aire en un espacio acondicionado […]
Método de control de bomba, del 4 de Diciembre de 2019, de Grundfos Holding A/S: Procedimiento de control de bombas para controlar el funcionamiento de un sistema der bombas con al menos dos equipos de bombas , que están dispuestos en paralelo […]
MÉTODO Y SISTEMA DE CONTROL PREDICTIVO DE UN CONVERTIDOR CC/CA, del 2 de Diciembre de 2019, de UNIVERSIDAD POLITECNICA DE MADRID: Método y sistema de control predictivo de un convertidor CC/CA. Se divulga un método y un sistema de control predictivo de un convertidor CC/CA para transmisión […]