MÉTODO Y SISTEMA DE SEGUIMIENTO DE LA CALIBRACIÓN DEL SISTEMA DE PRUEBA DEL PARÁMETRO DE DISPERSIÓN.
Un método de corrección de las mediciones del parámetro-S para un dispositivo bajo prueba (DUT) que tiene parámetros-S y al menos un puerto del DUT,
que utiliza un dispositivo de medición del parámetro-S incluyendo por lo menos un puerto de medición, y que comprende el acoplamiento de un módulo de seguimiento que incluye un primer y un segundo puertos, por su primer puerto al puerto de medición para formar un sistema de prueba del parámetro-S, en donde el módulo de seguimiento incluye además un conmutador conectado al primer puerto y, en una posición directa, conectando el primer puerto al segundo, y una pluralidad de estándares eléctricos caracterizados por un primer grupo de parámetros-S; la determinación de una calibración inicial para el sistema de prueba del parámetro-S; el acoplamiento del puerto del DUT al segundo puerto y la medición de los parámetros-S del dispositivo bajo prueba (DUT); el seguimiento de los cambios producidos en la calibración inicial durante la medición del dispositivo bajo prueba utilizando la pluralidad de estándares eléctricos y el conmutador; y la corrección de los parámetros-S medidos utilizando los cambios seguidos
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E09150811.
Solicitante: COM DEV INTERNATIONAL LIMITED.
Nacionalidad solicitante: Canadá.
Dirección: 155 SHELDON DRIVE CAMBRIDGE ON N1R 7H6 CANADA.
Inventor/es: PEACH,ROBERT CHRISTOPHER, VAN LINGEN,CHARLES, ALBERT-LEBRUN,XAVIER M. H, LISI,MARIO.
Fecha de Publicación: .
Fecha Solicitud PCT: 16 de Enero de 2009.
Fecha Concesión Europea: 15 de Septiembre de 2010.
Clasificación Internacional de Patentes:
- G01R27/32 FISICA. › G01 METROLOGIA; ENSAYOS. › G01R MEDIDA DE VARIABLES ELECTRICAS; MEDIDA DE VARIABLES MAGNETICAS (indicación de la sintonización de circuitos resonantes H03J 3/12). › G01R 27/00 Dispositivos para realizar medidas de la resistencia, reactancia, impedancia, o de características eléctricas derivadas. › en circuitos con constantes repartidas.
- G01R35/00C
Clasificación PCT:
- G01R27/28 G01R 27/00 […] › Medida de la atenuación, de la ganancia, del desfase o de las características derivadas en redes eléctricas cuadripolares, es decir, redes de doble entrada; Medida de la respuesta transitoria (en los sistemas de transmisión por líneas H04B 3/46).
- G01R35/00 G01R […] › Ensayo o calibrado de los aparatos cubiertos por los otros grupos de esta subclase.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
Método y sistema de seguimiento de la calibración del sistema de prueba del parámetro de dispersión.
Sector
Las realizaciones descritas se refieren a los sistemas y métodos de corrección de las mediciones del parámetro de dispersión para contabilizar la desviación de calibración. Más particularmente, las realizaciones descritas se refieren al seguimiento de la calibración del sistema de prueba del parámetro de dispersión y a la corrección de las mediciones de dicho parámetro de dispersión para contabilizar cualquier desviación de calibración.
Antecedentes
Los dispositivos de radiofrecuencia (RF) y microondas se caracterizan generalmente por una matriz N x N de parámetros de dispersión (parámetros-S) donde N es el número de puertos del dispositivo de RF o microondas. Cada parámetro S, denominado Sxy, es la proporción de la señal de salida del puerto x respecto a la señal incidente en el puerto y cuando en el dispositivo de RF o microondas no inciden otras señales. Por ejemplo, la proporción entre la señal de salida del puerto 2 y la señal que incide en el puerto 1 es denotada por S21.
Los parámetros-S se miden normalmente por medio de un dispositivo de medición de parámetros-S como, por ejemplo, un analizador de red. La mayoría de dichos analizadores de red tienen sólo dos puertos de medición, aunque también los hay disponibles con cuatro o más puertos de medición. Para adaptar un dispositivo multi-puerto bajo prueba (DUT) a un analizador de red con dos puertos, este último se conecta con frecuencia a una matriz de conmutación programable que contiene al menos tantos puertos como número de puertos del DUT. El analizador de red mide los parámetros-S del DUT configurando la matriz de conmutación para que acople los dos puertos del DUT a los dos puertos de medición. Los puertos restantes del DUT son terminados en la matriz de conmutación.
Sea cual sea el tipo de dispositivo de medición del parámetro-S usado, y de si se ha utilizado una matriz de conmutación, el sistema de medición del parámetro-S incluirá inevitablemente imperfecciones del hardware que pueden dar lugar a errores de medición si no se tienen en cuenta en las mediciones. Estos errores pueden ser sistemáticos o aleatorios. Los errores sistemáticos son originados por imperfecciones en el equipo de prueba y la configuración de prueba. Por ejemplo, los errores sistemáticos se pueden producir a partir de efectos direccionales en los acopladores, pérdidas de cable y desajustes entre el sistema de prueba del parámetro-S y el DUT. Habitualmente, estos errores pueden ser determinados por calibración y eliminarse matemáticamente durante el proceso de medición. Para una medición estándar por un analizador de red con dos puertos, existe un modelo de calibración generalmente aceptado que se utiliza para eliminar los efectos de los doce errores sistemáticos siguientes:
seguimiento de transmisión inverso (ETR).
En cambio, los errores aleatorios varían al azar en función del tiempo y, por tanto, no pueden ser eliminados mediante calibración. Los principales causantes de errores aleatorios son el ruido del aparato, la repetición del conmutador y la repetición del conector.
Incluso si el sistema es calibrado, todos los errores no pueden ser eliminados porque tras la calibración dicho sistema puede estar sujeto a varios cambios causantes de la desviación de calibración. Específicamente, son los cambios de temperatura, los debidos a la conmutación de la trayectoria de RF o microondas y al movimiento de los cables. Cuando en el sistema de prueba se utilizan conmutadores electromecánicos de RF o microondas, sus características de RF o microondas cambian cuando son ejecutados. El movimiento del cable también deteriora las características del sistema y cuanto mayor es la frecuencia más significativos son los efectos negativos. Por consiguiente, si la desviación de calibración no se tiene en cuenta las mediciones del parámetro-S perderán su exactitud con el tiempo.
Generalmente, la desviación de calibración se minimiza o elimina mediante uno de los métodos siguientes: el uso de cables de prueba de dióxido de silicio (SiO2) para minimizar la pérdida del sistema de prueba y mejorar la estabilidad de fase frente a la temperatura; el uso de conmutadores de elevada repetición; o el uso de cables de referencia para compensar el efecto de los cambios sistemáticos. Cada una de estas técnicas, sin embargo, lleva asociada una limitación particular. De manera específica, los conmutadores de elevada repetición son costosos y degeneran sustancialmente sus capacidades de repetición con el uso. Por otro lado, aunque los cables de dióxido de silicio sean muy estables con la temperatura, muestran cambios en función de la misma. Además, la eficacia de tales métodos se reduce significativamente a medida que las frecuencias de prueba alcanzan la banda Ka o cuando las pérdidas del sistema de prueba incrementan, por ejemplo, cuando se emplean cables de prueba largos para conectar el sistema de prueba al DUT.
En el documento US 2004251922 se describe un método y productos de programa informático para calibraciones completas de N puertos de un analizador vectorial. No obstante, existen muchas aplicaciones que requieren cables largos entre el sistema de prueba y el DUT. Por ejemplo, puede ser necesario poner el DUT en un entorno específico como dentro de una cámara de vacío, una cámara térmica o una cámara anecoica. Asimismo, puede que se requiera probar el DUT in situ como integrado mecánicamente en un gran conjunto. Por consiguiente, existe una necesidad por un sistema que pueda corregir dinámicamente las mediciones del parámetro-S para contabilizar la desviación de calibración.
Sumario
Las realizaciones descritas en el presente documento proporcionan en un aspecto un método de corrección de las mediciones del parámetro-S para un dispositivo bajo prueba (DUT) utilizando un dispositivo de medición del parámetro-S. El método incluye el acoplamiento de un módulo de seguimiento a un puerto del dispositivo de medición del parámetro-S para formar un sistema de prueba del parámetro-S en donde dicho módulo de seguimiento está asociado a una pluralidad de estándares eléctricos caracterizados por un primer grupo de parámetros-S; la determinación de una calibración inicial para el sistema de prueba del parámetro-S; el acoplamiento del dispositivo bajo prueba (DUT) al sistema de prueba del parámetro-S y la medición de los parámetros-S del dispositivo bajo prueba (DUT); el seguimiento de los cambios producidos en la calibración inicial durante la medición utilizando la pluralidad de estándares eléctricos del módulo de seguimiento; y la corrección de los parámetros-S medidos utilizando los cambios seguidos.
La determinación de la calibración inicial puede incluir la determinación de un segundo grupo de parámetros-S para la pluralidad de estándares eléctricos; la determinación de una calibración de un puerto a lo largo de un plano de calibración en donde dicho plano de calibración está situado entre el módulo de seguimiento y el dispositivo bajo prueba (DUT); la determinación de una primera calibración de un puerto a lo largo de un plano de corrección en base al primer y segundo grupos de parámetros-S en donde el plano de corrección está situado entre el módulo de seguimiento y el dispositivo de medición del parámetro-S; y el cálculo de un adaptador de error basado en la calibración de un puerto a lo largo del plano de calibración y la primera calibración de un puerto a lo largo del plano de corrección.
El seguimiento de los cambios producidos en la calibración inicial puede incluir la determinación de un tercer grupo de parámetros-S para la pluralidad de estándares eléctricos; la determinación de una segunda...
Reivindicaciones:
1. Un método de corrección de las mediciones del parámetro-S para un dispositivo bajo prueba (DUT) que tiene parámetros-S y al menos un puerto del DUT, que utiliza un dispositivo de medición del parámetro-S incluyendo por lo menos un puerto de medición, y que comprende el acoplamiento de un módulo de seguimiento que incluye un primer y un segundo puertos, por su primer puerto al puerto de medición para formar un sistema de prueba del parámetro-S, en donde el módulo de seguimiento incluye además un conmutador conectado al primer puerto y, en una posición directa, conectando el primer puerto al segundo, y una pluralidad de estándares eléctricos caracterizados por un primer grupo de parámetros-S; la determinación de una calibración inicial para el sistema de prueba del parámetro-S; el acoplamiento del puerto del DUT al segundo puerto y la medición de los parámetros-S del dispositivo bajo prueba (DUT); el seguimiento de los cambios producidos en la calibración inicial durante la medición del dispositivo bajo prueba utilizando la pluralidad de estándares eléctricos y el conmutador; y la corrección de los parámetros-S medidos utilizando los cambios seguidos.
2. El método de la reivindicación 1, en donde la determinación de la calibración inicial incluye la determinación de un segundo grupo de parámetros-S para la pluralidad de estándares eléctricos; la determinación de una calibración de un puerto a lo largo de un plano de calibración en donde dicho plano está entre el módulo de seguimiento y el dispositivo bajo prueba (DUT); la determinación de una primera calibración de un puerto a lo largo de un plano de corrección en base al primer y segundo grupos de parámetros-S en donde dicho plano de corrección está entre el módulo de seguimiento y el dispositivo de medición del parámetro-S; y el cálculo de un adaptador de error en base a la calibración de un puerto a lo largo del plano de calibración y la primera calibración de un puerto a lo largo del plano de corrección.
3. El método de la reivindicación 2, en donde el seguimiento de los cambios producidos en la calibración inicial incluye la determinación de un tercer grupo de parámetros-S para la pluralidad de estándares eléctricos; la determinación de una segunda calibración de un puerto a lo largo del plano de corrección en base al primer y tercer grupos de parámetros-S; y la generación de una calibración corregida de un puerto a lo largo del plano de calibración en base a la segunda calibración de un puerto a lo largo del plano de corrección y el adaptador de error.
4. El método de la reivindicación 3, en donde la corrección de los parámetros-S medidos comprende la aplicación de la calibración corregida de un puerto a lo largo del plano de calibración a dichos parámetros-S medidos.
5. El método de la reivindicación 1, que además comprende el acoplamiento de una pluralidad de módulos de seguimiento a una pluralidad de puertos del dispositivo de medición del parámetro-S para formar un sistema de prueba del parámetro-S, incluyendo cada módulo de seguimiento un grupo de estándares eléctricos caracterizados por un primer grupo de parámetros-S; el seguimiento de los cambios producidos en la calibración inicial durante la medición del dispositivo bajo prueba utilizando los estándares eléctricos de la pluralidad de módulos de seguimiento; y la corrección de los parámetros-S medidos utilizando los cambios seguidos.
6. El método de la reivindicación 5, en donde la determinación de la calibración inicial comprende la determinación de un segundo grupo de parámetros-S para cada grupo de estándares eléctricos; la generación de una calibración inicial completa de dos puertos a lo largo de un plano de calibración en donde dicho plano está entre la pluralidad de módulos de seguimiento y el dispositivo bajo prueba (DUT) en donde la calibración completa de dos puertos comprende las calibraciones de dos puertos para al menos un par de puertos seleccionados de la pluralidad de los mismos; la generación de una primera calibración de un puerto a lo largo de un plano de corrección para cada puerto del DUT del dispositivo bajo prueba (DUT) en base al primer y segundo grupos de parámetros-S en donde dicho plano de corrección está entre la pluralidad de módulos de seguimiento y el dispositivo de medición del parámetro-S; y el cálculo de un adaptador de error para cada puerto del DUT del dispositivo bajo prueba (DUT) en base a la calibración inicial completa de dos puertos a lo largo del plano de calibración y las primeras calibraciones de un puerto a lo largo del plano de corrección.
7. El método de la reivindicación 6, en donde el seguimiento de los cambios producidos en la calibración inicial comprende la determinación de un tercer grupo de parámetros-S para cada grupo de estándares eléctricos; la generación de una segunda calibración de un puerto a lo largo del plano de corrección para cada puerto del DUT del dispositivo bajo prueba (DUT) en base al primer y tercer grupos de parámetros-S; la determinación de una calibración completa de dos puertos a lo largo del plano de corrección en base a las segundas calibraciones de un puerto a lo largo del plano de corrección y la calibración inicial completa de dos puertos a lo largo del plano de calibración; y la generación de una calibración corregida completa de dos puertos a lo largo del plano de calibración en base a la calibración completa de dos puertos a lo largo del plano de corrección y los adaptadores de error.
8. El método de la reivindicación 7, en donde la calibración corregida completa de dos puertos a lo largo del plano de calibración y la calibración inicial completa de dos puertos a lo largo del plano de calibración incluyen términos de error ETF y ETR con fases asociadas, y la generación de una calibración corregida completa de dos puertos a lo largo del plano de calibración incluye el alineamiento de las fases de los términos ETF y ETR de la calibración corregida completa de dos puertos a lo largo del plano de calibración con las fases de los términos ETF y ETR de la calibración inicial completa de dos puertos a lo largo del plano de calibración.
9. El método de la reivindicación 7, en donde la calibración completa de dos puertos a lo largo del plano de corrección incluye los términos de error ELF, ELR, ETF, y ETR, y la determinación de la calibración completa de dos puertos a lo largo del plano de corrección comprende la determinación de ELF, ELR, ETF y ETR en base a una pluralidad de parámetros específicos del dispositivo de medición del parámetro-S y las segundas calibraciones de un puerto a lo largo del plano de corrección.
10. El método de la reivindicación 9, en donde la pluralidad de parámetros específicos del dispositivo de medición del parámetro-S son generados a partir de la calibración inicial completa de dos puertos a lo largo del plano de calibración.
11. El método de la reivindicación 10, en donde la pluralidad de parámetros específicos del dispositivo de medición del parámetro-S incluye:

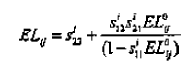
12. El método de la reivindicación 11, en donde los términos ELF y ELR son generados a partir de la fórmula siguiente:
13. El método de la reivindicación 11, en donde los términos de error ETF y ETR son generados a partir de la fórmula siguiente:
14. El método de la reivindicación 7, en donde la calibración completa de dos puertos a lo largo del plano de corrección incluye los términos de error ELF, ELR, ETF, y ETR, y la determinación de la calibración completa de dos puertos a lo largo del plano de corrección comprende la determinación de ELF, ELR, ETF y ETR en base a una pluralidad de adaptadores de error del plano de corrección en donde cada uno de ellos representa la diferencia entre una primera y una segunda calibraciones de un puerto a lo largo del plano de corrección.
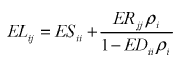
15. El método de la reivindicación 14, en donde los términos de error ELF y ELR de la calibración completa de dos puertos a lo largo del plano de corrección son generados de acuerdo con la fórmula siguiente:
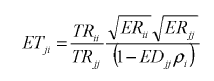
16. El método de la reivindicación 14, en donde los términos de error ETF y ETR de la calibración completa de dos puertos a lo largo del plano de corrección son generados de acuerdo con la fórmula siguiente:
17. El método de la reivindicación 7, en donde la corrección de los parámetros-S medidos comprende la aplicación de la calibración corregida completa de dos puertos a lo largo del plano de calibración a dichos parámetros-S medidos.
18. El método de la reivindicación 17, en donde la determinación de la calibración inicial comprende además la captura de una primera concordancia de carga para cada puerto del sistema de prueba del parámetro-S, y el método comprende además la determinación de una segunda concordancia de carga para cada puerto del sistema de prueba del parámetro-S en base a las segundas calibraciones de un puerto a lo largo del plano de corrección y los adaptadotes de error, y el ajuste de los parámetros-S corregidos en base a las segundas concordancias de carga.
19. El método de la reivindicación 18, en donde el ajuste de los parámetros-S corregidos comprende la aplicación de la corrección de N puertos a dichos parámetros-S corregidos.
20. El método de la reivindicación 6, en donde el dispositivo bajo prueba es un convertidor de frecuencia y el seguimiento de los cambios producidos en la calibración inicial comprende la determinación de un tercer grupo de parámetros-S para cada grupo de estándares eléctricos; la generación de una segunda calibración de un puerto a lo largo del plano de corrección para cada puerto del DUT del dispositivo bajo prueba (DUT) en base al primer y tercer grupos de parámetros-S; la generación de una calibración de un puerto a lo largo del plano de calibración para cada DUT del dispositivo bajo prueba (DUT) en base a las segundas calibraciones de un puerto a lo largo del plano de corrección y los adaptadores de error; la generación de los términos de error ELF y ETF a lo largo del plano de calibración en base a la calibración inicial completa de dos puertos a lo largo del plano de calibración y las calibraciones de un puerto a lo largo del plano de calibración; y la generación de una calibración corregida completa de dos puertos a lo largo del plano de calibración en base a las calibraciones de un puerto a lo largo del plano de calibración y los términos de error ELF y ETF a lo largo del plano de calibración.
21. El método de la reivindicación 20, en donde la generación de los términos de error ELF y ETF a lo largo del plano de calibración comprende la generación de parámetros-S diferenciados para cada puerto del DUT del dispositivo bajo prueba (DUT) diferenciando la calibración inicial completa de dos puertos a lo largo del plano de calibración y las calibraciones de un puerto a lo largo del plano de calibración; y la extracción de los parámetros-S diferenciados de la calibración inicial completa de dos puertos a lo largo del plano de calibración.
22. El método de la reivindicación 20, en donde la generación de la calibración corregida completa de dos puertos a lo largo del plano de calibración incluye la fijación del término ELR a cero y del término ETR a uno.
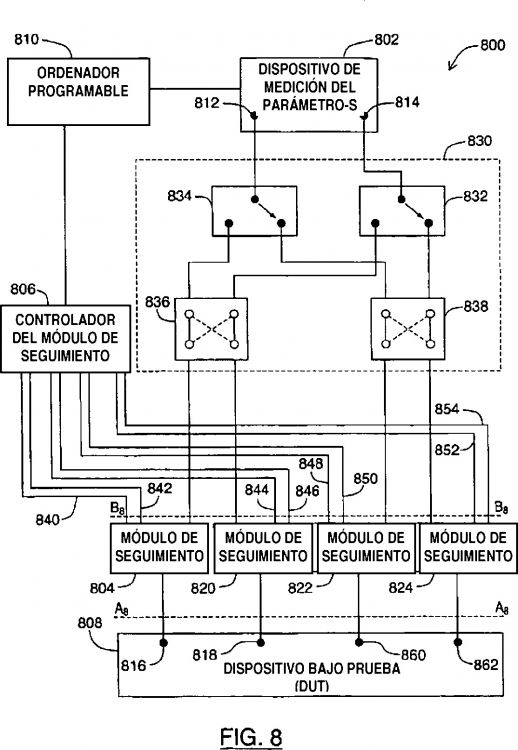
23. Un sistema de prueba del parámetro-S para corregir las mediciones del parámetro-S de un dispositivo bajo prueba (DUT), comprendiendo dicho sistema un dispositivo de medición del parámetro-S que incluye al menos un puerto de medición; un módulo de seguimiento que incluye un primer y un segundo puertos, estando el primero acoplado al puerto de medición, en donde dicho módulo de seguimiento incluye además una pluralidad de estándares eléctricos y un conmutador conectado al primer puerto y, en una posición directa, conectado el primer puerto al segundo; un controlador del módulo de seguimiento para controlar el módulo de seguimiento; un dispositivo bajo prueba que tiene parámetros-S y al menos un puerto del DUT acoplado de manera removible al segundo puerto; y un ordenador programable que consta de programas para determinar una calibración inicial para el sistema de prueba del parámetro-S; medir los parámetros-S del dispositivo bajo prueba (DUT); seguir los cambios producidos en la calibración inicial durante la medición del dispositivo bajo prueba utilizando la pluralidad de estándares eléctricos y el conmutador; y corregir los parámetros-S medidos utilizando los cambios seguidos.
24. El sistema de la reivindicación 23, que además comprende una pluralidad de módulos de seguimiento acoplados al dispositivo de medición del parámetro-S para formar un sistema de prueba del parámetro-S en donde cada módulo de seguimiento está asociado a una pluralidad de estándares eléctricos; y en donde el controlador del módulo de seguimiento controla la pluralidad de módulos de seguimiento; el dispositivo bajo prueba está acoplado de manera removible a la pluralidad de módulos de seguimiento; y el ordenador programable consta de medios para seguir los cambios producidos en la calibración inicial durante la medición del dispositivo bajo prueba utilizando los estándares eléctricos de la pluralidad de módulos de seguimiento; y corregir los parámetros-S medidos utilizando los cambios seguidos.
25. El sistema de la reivindicación 23 que además comprende una matriz de conmutación situada entre el dispositivo de medición del parámetro-S y el controlador del módulo de seguimiento.
Patentes similares o relacionadas:
MEDICION DE LA POSICION DE UN ELEMENTO ALARGADO., del 1 de Abril de 1993, de N.V. BEKAERT S.A.: LA POSICION ALINEADA DE UN ELEMENTO ALARGADO SE MIDE UTILIZANDO UN MEDIO DE TRANSMISION . EL MEDIO DE TRANSMISION CONSTA DE UN EMISOR DE MICROONDAS […]
Dispositivo y procedimiento de medición de un coeficiente de calibración de corriente y dispositivo y procedimiento de detección de corriente, del 17 de Junio de 2020, de Contemporary Amperex Technology Co., Limited: Un dispositivo de medición para medir un coeficiente de calibración de corriente, que comprende un ordenador host y una fuente de corriente ; […]
SISTEMA DE CALIBRACIÓN PARA UN AUDIÓMETRO, del 30 de Abril de 2020, de Devimetrix, S.L: Sistema de calibración para un audiómetro con un transductor acústico , un audiómetro que comprende un dispositivo calibrador para generar una referencia […]
SISTEMA DE CALIBRACIÓN PARA UN AUDIÓMETRO, del 27 de Abril de 2020, de Devimetrix, S.L: Sistema de calibración para un audiómetro con un transductor acústico , un audiómetro que comprende un dispositivo calibrador para generar una referencia […]
 Sistema y método para monitorizar una microestructura de un objetivo de metal, del 27 de Noviembre de 2019, de THE UNIVERSITY OF MANCHESTER: Un sistema para monitorizar una microestructura de un objetivo de metal, que comprende:
una pluralidad de sensores (911, 912, 913, ... 91n) electromagnéticos […]
Sistema y método para monitorizar una microestructura de un objetivo de metal, del 27 de Noviembre de 2019, de THE UNIVERSITY OF MANCHESTER: Un sistema para monitorizar una microestructura de un objetivo de metal, que comprende:
una pluralidad de sensores (911, 912, 913, ... 91n) electromagnéticos […]
Disposición de puente de medida con detección de errores mejorada, del 9 de Octubre de 2019, de TECPHARMA LICENSING AG: Disposicion de puente de medida , comprendiendo un puente de medida con al menos un primer semipuente con una primera conexion de medicion (+UD), […]
MÉTODO PARA LA EVALUACIÓN Y CALIFICACIÓN DE LAS CARACTERÍSTICAS FUNCIONALES DE INSTRUMENTOS DE MEDIDA Y DIAGNÓSTICO DE DESCARGAS PARCIALES E INSTALACIÓN PARA GENERAR SERIES DE PULSOS DE REFERENCIA DE DESCARGAS PARCIALES, del 29 de Agosto de 2019, de FUNDACIÓN PARA EL FOMENTO DE LA INNOVACIÓN INDUSTRIAL: Método para la evaluación y calificación de las características funcionales de instrumentos de medida y diagnóstico de DP, que comprende las siguientes […]
Método para la evaluación y calificación de las características funcionales de instrumentos de medida y diagnóstico de descargas parciales e instalación para generar series de pulsos de referencia de descargas parciales, del 27 de Agosto de 2019, de FUNDACIÓN PARA EL FOMENTO DE LA INNOVACIÓN INDUSTRIAL: Método para la evaluación y calificación de las características funcionales de instrumentos de medida y diagnóstico de DP, que comprende las siguientes etapas: - generación […]