MÉTODO Y DISPOSICIÓN PARA DETERMINAR EL MOVIMIENTO ROTACIONAL.
Un método para detectar movimiento giratorio, que comprende los pasos de 5 colocar un sensor (2) en el extremo de un eje de giro de un objeto (1) giratorio y a una distancia del eje de giro,
colocar un detector (3) externamente al extremo del eje de giro del objeto giratorio de tal manera que la distancia entre el sensor y el detector cambie cuando el objeto gira alrededor de su eje de giro, 10 transmitir una interrogación desde el detector (3) al sensor (2), recibir la interrogación con el sensor (2) y, en respuesta a la recepción de la interrogación, transmitir una respuesta desde el sensor (2) al detector (3), determinar la potencia usada en la señalización, y detectar movimiento de giro basándose en un cambio en la potencia de la señalización, caracterizado porque el método comprende también pasos en los cuales el detector transmite una interrogación a intervalos regulares y se cambia la potencia de transmisión de la interrogación transmitida por el detector (3) en respuesta a la respuesta transmitida por el sensor (2) de tal manera que si se recibe una respuesta procedente del sensor, se reduce la potencia de transmisión de la siguiente 20 interrogación, y si no se recibe respuesta del sensor, se aumenta la potencia de transmisión de la siguiente interrogación, en cuyo caso la potencia que está siendo determinada es la potencia de transmisión del detector
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E07150002.
Solicitante: ABB OY.
Nacionalidad solicitante: Finlandia.
Dirección: STRÖMBERGINTIE 1 00380 HELSINKI FINLANDIA.
Inventor/es: JOENSUU,HEIKKI.
Fecha de Publicación: .
Fecha Solicitud PCT: 13 de Diciembre de 2007.
Fecha Concesión Europea: 8 de Septiembre de 2010.
Clasificación Internacional de Patentes:
- G01D5/48 FISICA. › G01 METROLOGIA; ENSAYOS. › G01D MEDIDAS NO ESPECIALMENTE ADAPTADAS A UNA VARIABLE PARTICULAR; DISPOSICIONES PARA LA MEDIDA DE DOS O MAS VARIABLES NO CUBIERTAS POR OTRA UNICA SUBCLASE; APARATOS CONTADORES DE TARIFA; DISPOSICIONES PARA TRANSFERENCIA O TRANSDUCTORES NO ESPECIALMENTE ADAPTADAS A UNA VARIABLE PARTICULAR; MEDIDAS O ENSAYOS NO PREVISTOS EN OTRO LUGAR. › G01D 5/00 Medios mecánicos para la transferencia de la magnitud de salida de un elemento sensor; Medios para la conversión de la magnitud de salida de un elemento sensor en otra variable, en los que la forma o naturaleza del elemento sensor no determinan los medios de conversión; Transductores no especialmente adaptados a una variable específica (G01D 3/00 tiene prioridad; especialmente adaptados para aparatos que dan resultados distintos al valor instantáneo de una variable G01D 1/00). › que utilizan medios de radiación de ondas o partículas (G01D 5/26 tiene prioridad).
- G01P13/04 G01 […] › G01P MEDIDA DE VELOCIDADES LINEALES O ANGULARES, DE LA ACELERACION, DECELERACION O DE CHOQUES; INDICACION DE LA PRESENCIA, AUSENCIA DE MOVIMIENTO; INDICACION DE DIRECCIÓN DE MOVIMIENTO (midiendo la velocidad angular utilizando efectos giroscópicos G01C 19/00; dispositivos de medida combinados para medir dos o más variables de un movimiento G01C 23/00; medida de la velocidad del sonido G01H 5/00; medida de la velocidad de la luz G01J 7/00; medida de la dirección o de la velocidad de objetos sólidos por reflexión o reradiación de ondas radio u otras ondas basada en los efectos de propagación, p. ej. el efecto Doppler, el tiempo de propagación, la dirección de propagación, G01S; medida de la velocidad de radiaciones nucleares G01T). › G01P 13/00 Indicación o registro de la existencia, ausencia o de la dirección de un movimiento; Indicación o registro de la dirección del movimiento. › Indicación del sentido positivo o negativo de un movimiento lineal o del sentido horario o antihorario de un movimiento de rotación.
- G01P3/44 G01P […] › G01P 3/00 Medida de la velocidad lineal o angular; Medida de diferencias de velocidades lineales o angulares (G01P 5/00 - G01P 11/00 tienen prioridad; midiendo la velocidad angular utilizando efectos giroscópicos G01C 19/00). › para medir la velocidad angular (G01P 3/56 tiene prioridad).
Clasificación PCT:
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
ANTECEDENTES DEL INVENTO
El invento se refiere a la determinación del movimiento de giro de un objeto y, en concreto, a una forma preferible de proporcionar duplicación de la medición de velocidad relacionada con la seguridad de máquinas.
5 Las mediciones de velocidad sin contacto convencionales están basadas en soluciones inductivas, capacitivas, magnéticas o que emplean luz, en las cuales un detector, en otras palabras un conmutador de proximidad de corta distancia, está colocado típicamente muy cerca del eje de un objeto giratorio, y el paso de una contraparte o contrapartes sujeta a la superficie cilíndrica del eje se puede detectar con precisión como pulsos del detector. Esta contraparte se puede caracterizar como una parte pasiva del sistema. En este tipo de medición de velocidad una frecuencia de pulso típica es un pulso por giro del eje, en cuyo caso la medición recibe el nombre de medición de pulso disperso. Debido a la naturaleza de la medición de pulso disperso, ésta no es muy precisa, y existen retrasos en la medición cuando cambia la velocidad.
15 El propósito de este tipo de medición de movimiento giratorio es proporcionar información sobre el movimiento de giro real y no tanto un resultado de medición preciso de la velocidad exacta del giro que se pueda usar, por ejemplo, como información de realimentación para el control de la velocidad. Típicamente, la función de la medición de pulso disperso convencional es producir un segundo resultado de medición relacionado con la seguridad de máquinas. En algunas condiciones de funcionamiento se necesitan a menudo dos mediciones independientes de la velocidad de giro y éstas están relacionadas, por ejemplo, con el funcionamiento de equipo de seguridad.
Para la duplicación de la medición no es necesario implementar ambas 25 mediciones duplicadas con detectores precisos y, a menudo, caros, cuando la segunda medición se usa sólo para detectar el movimiento de giro.
Generalmente se usan tacómetros de contacto y detectores de pulsos para realizar mediciones precisas. Además, se puede fijar al eje un anillo codificado magnetizado u otro anillo codificado sin contacto. El uso de un dispositivo de este tipo corresponde a las citadas soluciones de contacto en vista de sus costes relativamente grandes y de la dificultad de su instalación. Los documentos JP2006195798 y WO2006061737 describen dos dispositivos de medición de velocidad sin contacto convencionales.
De esta forma, para conseguir seguridad de máquina y mediciones duplicadas, es necesario producir un método de medición fiable que sea sencillo de instalar y barato y fiable. BREVE DESCRIPCIÓN DEL INVENTO
5 De esta manera, es un objeto del invento desarrollar un método y un aparato que implemente el método de tal forma que se solucionen los problemas anteriores. El objeto del invento es alcanzado por un método y un sistema que están caracterizados por lo que se indica en las reivindicaciones independientes. En las reivindicaciones dependientes se explican realizaciones preferentes del invento.
10 El invento se basa en la idea de que a un objeto giratorio se le coloca un sensor, típicamente en el extremo de su eje, para responder a las interrogaciones hechas por un detector situado externamente al extremo del eje. Basándose en la potencia de estas interrogaciones es posible determinar la posición del sensor con respecto al detector, por lo cual el movimiento de giro es indicado como una variación
15 de velocidad. La combinación de un sensor y un detector es preferiblemente del tipo RFID utilizada para identificar objetos colocando en el objeto un sensor con un identificador y leyendo la información del identificador mediante el detector. Una ventaja del método y sistema del invento es la considerable simplicidad de la instalación del equipo necesario. La instalación no requiere alineamientos o
20 mediciones exactas. La colocación mecánica del detector y del sensor no es crítica para el funcionamiento del sistema y del método. En el sistema también es posible utilizar sensores de tamaños diferentes sin necesidad de ningún ajuste especial. Los dispositivos utilizados en el invento se pueden fabricar muy tolerantes con respecto al medio ambiente, porque los citados dispositivos no dependen de cojinetes
25 o de otras partes mecánicas que sufran desgastes. Esto es una ventaja significativa en el uso industrial, por ejemplo, donde las condiciones para los dispositivos de medida son a menudo difíciles. El aparato del invento es inmune a la vibración y a las correspondientes perturbaciones de los objetos que se están midiendo. Por ejemplo, las vibraciones pueden ser provocadas por las vibraciones de los ejes y de la transmisión de un rodillo que se esté midiendo. El equipo también es sencillo de mantener, porque es suficiente con limpiarlo cuando se hace una limpieza general.
El detector del sistema se puede colocar en condiciones más fáciles que aquellas del eje que se está midiendo, en otras palabras, detrás de un plexiglás, por 35 ejemplo.
El cableado del sistema del invento hacia el controlador del sistema sólo requiere dos pares, uno para el suministro de potencia auxiliar y uno para señalización. BREVE DESCRIPCION DE LAS FIGURAS
5 Se describirá ahora el invento con mayor detalle por medio de realizaciones
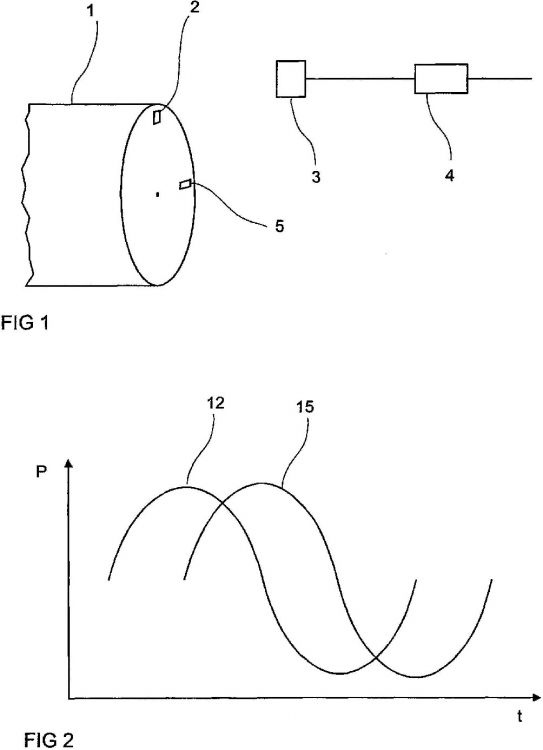
preferentes y haciendo referencia a los dibujos adjuntos, en los cuales: La figura 1 muestra una vista general del sistema del invento, y La figura 2 muestra una vista general de las curvas de potencia a obtener.
DESCRIPCION DETALLADA DEL INVENTO
10 La figura 1 muestra una vista general de la configuración del sistema del invento. En el sistema, un sensor 2 está situado en el extremo de un eje 1. Un detector 3 está a su vez fijado en su sitio de tal manera que es externo al extremo del eje y a la superficie envolvente del eje. El sensor está colocado en un objeto giratorio, tal como el extremo del eje de un rodillo, de tal manera que cuando el objeto gira la distancia entre el sensor y el detector varía con el ángulo de posición del objeto. El sensor 2 está además instalado de tal forma que puede leer el detector 3. El detector está conectado a través de una conexión de señalización a un controlador 4 de sistema y el controlador de sistema está además conectado a través de una conexión de señalización a un controlador de proceso o a un sistema de alto nivel correspondiente.
20 El detector y el sensor utilizados en el invento son partes de un sistema RFID (Identificación por Radio Frecuencia) y operan de tal forma que el detector está activo y transmite una interrogación en una frecuencia de sistema. El sensor recibe la interrogación y obtiene de dicha interrogación la energía que necesita para su propia transmisión, y responde a la interrogación sobre un trayecto radio de una forma
25 predefinida. En aplicaciones conocidas relacionadas con identificación de objetos, un sensor RFID transmite su código de identificación único a un detector en respuesta a una interrogación del detector. De acuerdo con el método del invento, el movimiento de giro se determina basándose en la potencia de transmisión entre un detector y un sensor. En el método y sistema del invento, el punto de interés no es tanto la información transmitida por el sensor, sino la potencia de transmisión del detector o del sensor, a partir de la cual se determina el movimiento de giro de acuerdo con el invento.
En una realización del método del invento, el detector transmite una interrogación a intervalos de tiempo regulares, y la potencia de transmisión del 35 detector 3 se ajusta de tal forma que sea sólo la suficiente para que el sensor 2 reciba la interrogación del detector. Cuando el sensor responde a la interrogación, la potencia de transmisión de la siguiente interrogación se reduce en una cantidad preestablecida, por ejemplo un escalón de 3 dB. Si no se recibe respuesta del sensor a la interrogación del detector, la potencia de transmisión se aumenta a su vez en una 5 cantidad pre-establecida, por ejemplo un escalón de 1 dB. Cuando continúa el funcionamiento en la forma descrita anteriormente reduciendo y aumentando la potencia de transmisión dependiendo de la respuesta o no respuesta del sensor, se obtiene una curva de onda senoidal cíclica de la gráfica de potencia de la interrogación periódicamente transmitida, y la frecuencia de la curva corresponde a la frecuencia de
10 giro...
Reivindicaciones:
1. Un método para detectar movimiento giratorio, que comprende los pasos de 5 colocar un sensor (2) en el extremo de un eje de giro de un objeto (1) giratorio y a una distancia del eje de giro,
colocar un detector (3) externamente al extremo del eje de giro del objeto giratorio de tal manera que la distancia entre el sensor y el detector cambie cuando el objeto gira alrededor de su eje de giro,
10 transmitir una interrogación desde el detector (3) al sensor (2), recibir la interrogación con el sensor (2) y, en respuesta a la recepción de la interrogación, transmitir una respuesta desde el sensor (2) al detector (3), determinar la potencia usada en la señalización, y detectar movimiento de giro basándose en un cambio en la potencia de la señalización, caracterizado porque el método comprende también pasos en los cuales el detector transmite una interrogación a intervalos regulares y se cambia la potencia de transmisión de la interrogación transmitida por el detector (3) en respuesta a la respuesta transmitida por el sensor (2) de tal manera que si se recibe una respuesta procedente del sensor, se reduce la potencia de transmisión de la siguiente
20 interrogación, y si no se recibe respuesta del sensor, se aumenta la potencia de transmisión de la siguiente interrogación, en cuyo caso la potencia que está siendo determinada es la potencia de transmisión del detector. 2.Un método como se reivindica en la reivindicación 1, caracterizado porque la potencia de transmisión se reduce en respuesta a la recepción de una respuesta procedente del sensor más de lo que se aumenta la potencia de transmisión en respuesta a no recibir una respuesta, preferiblemente la potencia de transmisión se reduce por escalones de 3 dB y se aumenta por escalones de 1 dB.
3.Un método como se reivindica en la reivindicación 1 ó 2, caracterizado porque el método también comprende un paso de determinar la velocidad de giro del 30 objeto giratorio basándose en la potencia determinada, mientras que la potencia
determinada cambia en función del ángulo de posición del objeto giratorio.
4.Un método como se reivindica en cualquiera de las reivindicaciones 1 a 3, caracterizado porque el objeto giratorio tiene dos sensores (2, 5) colocados en él y las interrogaciones de los sensores se producen usando códigos que se diferencian unos de otros, por lo que el detector (3) está dispuesto para transmitir las
interrogaciones de forma alternativa a los sensores para determinar dos potencias diferentes usadas en la señalización, y la dirección de giro del objeto giratorio se determina a partir de las dos potencias.
5.Un método como se reivindica en cualquiera de las reivindicaciones 1 a 4, caracterizado porque el sensor es un componente pasivo que recibe energía procedente de la interrogación transmitida por el detector, y el sensor y el detector son en concreto componentes RFID.
6.Un sistema para detectar movimiento de giro, que comprende un sensor (2) colocado en el extremo de un eje de giro de un objeto (1)
10 giratorio a una distancia del eje de giro, un detector (3) colocado externamente al extremo del eje de giro del objeto giratorio de una manera tal que la distancia entre el sensor (2) y el detector (3) cambia cuando el objeto gira alrededor de su eje de giro, de modo que el detector (3) está dispuesto para transmitir una interrogación al sensor
15 (2), el sensor (2) está dispuesto para recibir la interrogación y en respuesta a la recepción de la interrogación, el sensor está dispuesto para transmitir una respuesta al detector (3), y el sistema también comprende medios para determinar la potencia usada en la señalización, y
20 medios para detectar movimiento de giro basándose en un cambio en la potencia de señalización, caracterizado porque el detector (3) está dispuesto para transmitir una interrogación a intervalos regulares, y la potencia de la interrogación transmitida por el detector (3) está dispuesta para que se pueda ajustar de tal forma que cuando el detector (3) recibe una respuesta, se reduce la potencia de la siguiente
25 interrogación, y si el detector (3) no recibe una respuesta, se aumenta la potencia de la siguiente interrogación, de modo que la potencia de señalización usada que es determinada en el sistema es la potencia usada por el detector en la interrogación. 7.Un sistema como se reivindica en la reivindicación 6, caracterizado porque la potencia de transmisión del detector (3) se reduce en respuesta a la recepción de una respuesta más de lo que se aumenta en respuesta a no recibir una respuesta, preferiblemente la potencia de transmisión se reduce por escalones de 3 dB y se aumenta por escalones de 1 dB.
8.Un sistema como se reivindica en la reivindicación 6 ó 7, caracterizado porque el sistema también comprende un controlador (4) de sistema que tiene una 35 conexión de señalización con el detector y está dispuesto para determinar la velocidad
50
1
de giro del objeto giratorio basándose en la potencia usada en la señalización, mientras que la potencia determinada cambia en función del ángulo de posición del objeto giratorio.
9.
Un sistema como se reivindica en la reivindicación 6 ó 7, caracterizado
porque dos sensores (2, 5) están colocados en el objeto giratorio y los sensores están colocados a un ángulo uno de otro con respecto al eje de giro, por lo que el detector está dispuesto para transmitir interrogaciones de forma alternativa a los sensores con códigos de identificación únicos, y el sistema determina dos potencias usadas en la señalización para determinar la dirección de giro del objeto giratorio.
0.
1
Un sistema como se reivindica en cualquiera de las reivindicaciones 6
a 9, caracterizado porque el sensor (2, 5) es un componente pasivo que recibe energía para su transmisión de la interrogación transmitida por el detector, de modo que el sensor y el detector son en concreto componentes RFID.
Patentes similares o relacionadas:
Sensor de velocidad del viento para un vehículo, del 5 de Febrero de 2020, de DEERE & COMPANY: Un sensor de velocidad del viento que comprende: una plataforma inferior; una plataforma superior; una pluralidad de pilares entre y conectados […]
Cuentarrevoluciones magnético para la autodetección de estados de error al determinar el número de revoluciones detectables con este cuentarrevoluciones, del 23 de Octubre de 2019, de Leibniz-Institut für Photonische Technologien e.V: Cuentarrevoluciones magnético o contador de desplazamiento para la autodetección de estados de error al determinar números de revoluciones o números de desplazamientos […]
Un dispositivo y un método para la detección sin contacto del estado rotacional de un rotor, del 11 de Mayo de 2016, de ELSTER MESSTECHNIK GMBH: Un dispositivo para la detección sin contacto del estado rotacional de un rotor, es decir, al menos una de las posiciones del estado rotacional, la dirección […]
 Un sensor óptico de viento de turbina eólica, del 15 de Diciembre de 2015, de VESTAS WIND SYSTEMS A/S: Sensor óptico de viento de turbina eólica , que comprende:
una pluralidad de fuentes de luz separadas angularmente montadas en el rotor de una turbina eólica, […]
Un sensor óptico de viento de turbina eólica, del 15 de Diciembre de 2015, de VESTAS WIND SYSTEMS A/S: Sensor óptico de viento de turbina eólica , que comprende:
una pluralidad de fuentes de luz separadas angularmente montadas en el rotor de una turbina eólica, […]
Procedimiento para detectar la rotación y el sentido de giro de un rotor, del 25 de Febrero de 2015, de Sensus Spectrum LLC: Procedimiento para detectar el giro y la dirección de giro (V, R) de un rotor, comprendiendo - posicionado de como minimo un elemento amortiguador (D) sobre el rotor […]
 Dispositivo y procedimiento para la comprobación de la capacidad de funcionamiento de un indicador de impulsos de giro, del 20 de Abril de 2012, de KRONES AG: Procedimiento para la comprobación de la capacidad de funcionamiento de un indicador de impulsos de giro , que entrega en al menos dos pistas (A, B, […]
Dispositivo y procedimiento para la comprobación de la capacidad de funcionamiento de un indicador de impulsos de giro, del 20 de Abril de 2012, de KRONES AG: Procedimiento para la comprobación de la capacidad de funcionamiento de un indicador de impulsos de giro , que entrega en al menos dos pistas (A, B, […]
 DISPOSITIVO DE DETECCION Y DE VISUALIZACION DE PARAMETROS DE ROTACION DE UNA RUEDA, ESPECIALMENTE DE UNA RUEDA DE VEHICULO Y VEHICULO ASOCIADO, del 16 de Octubre de 2008, de AKTIEBOLAGE SKF: Dispositivo de detección y de visualización de parámetros de rotación de una rueda, especialmente de una rueda de vehículo, y vehículo asociado.#El […]
DISPOSITIVO DE DETECCION Y DE VISUALIZACION DE PARAMETROS DE ROTACION DE UNA RUEDA, ESPECIALMENTE DE UNA RUEDA DE VEHICULO Y VEHICULO ASOCIADO, del 16 de Octubre de 2008, de AKTIEBOLAGE SKF: Dispositivo de detección y de visualización de parámetros de rotación de una rueda, especialmente de una rueda de vehículo, y vehículo asociado.#El […]
DISPOSITIVO DE MEDICIÓN, del 28 de Febrero de 2012, de CALDARO AB: Un dispositivo de medición para una medición de movimiento relativo entre una rueda giratoria y un estator que comprende: una rueda de cable giratoria, que se encuentra […]