MÉTODO DE COMPENSACIÓN DE ERRORES DE MEDICIÓN DE UNA MÁQUINA DE MEDICIÓN ORIGINADOS POR DEFORMACIONES DEL BANCO DE LA MÁQUINA PROVOCADAS POR LA CARGA EJERCIDA POR LA UNIDAD MÓVIL DE LA MÁQUINA SOBRE EL BANCO DE LA MÁQUINA, Y MÁQUINA DE MEDICIÓN QUE FUNCIONA DE ACUERDO CON DICHO MÉTODO.
Método de compensación de errores de medición de una máquina de medición (1) provocados por las deformaciones de un banco (2) de máquina de la máquina (1),
provocadas por la carga ejercida por una unidad móvil (4) de la máquina (1) sobre dicho banco de la máquina, y estando dicho método caracterizado por comprender una primera etapa (17) de adquisición en la cual son adquiridos primeros datos relativos a la deformación del banco (2) de la máquina cuando varía la posición de la unidad móvil (4) de la máquina (1), una segunda etapa (15) de adquisición en la cual son adquiridos segundos datos relativos al modo de reposo de una pieza de trabajo (W) sobre el banco (2) de la máquina, y una tercera etapa (18) de cálculo en la cual se calculan valores de corrección en función de dichos primeros y segundos datos
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/IT2007/000520.
Dirección: VIA VITTIME DI PIAZZA DELLA LOGGIA 6 10024 MONCALIERI ITALIA.
Inventor/es: MERLO,Lorenzo.
Fecha de Publicación: .
Fecha Solicitud PCT: 24 de Julio de 2007.
Clasificación Internacional de Patentes:
G01B21/04C
Clasificación PCT:
G01B11/00FISICA. › G01METROLOGIA; ENSAYOS. › G01BMEDIDA DE LA LONGITUD, ESPESOR O DIMENSIONES LINEALES ANALOGAS; MEDIDA DE ANGULOS; MEDIDA DE AREAS; MEDIDA DE IRREGULARIDADES DE SUPERFICIES O CONTORNOS. › Disposiciones de medida caracterizadas por la utilización de medios ópticos (instrumentos de los tipos cubiertos por el grupo G01B 9/00 en sí G01B 9/00).
G01B11/30G01B […] › G01B 11/00 Disposiciones de medida caracterizadas por la utilización de medios ópticos (instrumentos de los tipos cubiertos por el grupo G01B 9/00 en sí G01B 9/00). › para la medida de la rugosidad o la irregularidad de superficies.
G01B21/04G01B […] › G01B 21/00 Disposiciones de medida o sus detalles en caso de no adaptarse a los tipos particulares de medios de medida de los otros grupos de esta subclase. › mediante la medida de coordenadas de puntos.
G01B5/00G01B […] › Disposiciones de medida caracterizadas por la utilización de medios mecánicos (instrumentos de los tipos cubiertos por el grupo G01B 3/00 en sí G01B 3/00).
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
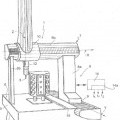
Método de compensación de errores de medición de una máquina de medición originados por deformaciones del banco de la máquina provocadas por la carga ejercida por la unidad móvil de la máquina sobre el banco de la máquina, y máquina de medición que funciona de acuerdo con dicho método. CAMPO TÉCNICO La presente invención se refiere a un método de compensación de errores de medición de una máquina de medición, originados por las deformaciones del banco de la máquina provocadas por la carga ejercida por la unidad móvil de la máquina sobre el banco de la máquina, así como a una máquina de medición que funciona de acuerdo con dicho método. TÉCNICA ANTERIOR Tal como es sabido, las máquinas de medición están dotadas generalmente de una base fija o banco de la máquina y de una unidad móvil diseñada para desplazar un cabezal de medición de acuerdo con ejes de coordenadas con respecto al banco de la máquina, en un espacio de medición situado sobre el banco de la máquina. La unidad móvil comprende generalmente un carro principal, que es móvil a lo largo de un eje longitudinal con respecto al banco de la máquina, y uno o varios carros soportados por el carro principal, que son móviles a lo largo de respectivos ejes de coordenadas. El banco de la máquina puede ser monolítico, por ejemplo fabricado de granito o de hierro fundido, o bien puede comprender un conjunto de componentes fijos rígidamente entre sí para formar una estructura sustancialmente rígida. En general, el banco de la máquina tiene dos funciones: soportar y contener la pieza de trabajo que está siendo medida, y definir una guía para la unidad móvil, y en concreto para el carro principal de la máquina, a lo largo de uno de los ejes de coordenadas de la máquina. Las máquinas de medición del tipo mencionado están dotadas generalmente de un sistema para la compensación de errores geométricos, es decir, de los errores de medición que dependen de los defectos de construcción de la máquina (por ejemplo, errores de la disposición rectilínea de los ejes, defectos de ortogonalidad entre los ejes, etc.). Durante el funcionamiento de la máquina, surgen deformaciones elásticas variables del banco de la máquina debido a las cargas ejercidas sobre el banco de la máquina por la unidad móvil de la máquina cuando varía la posición de los carros. Esto genera una alteración de la posición y la postura de la pieza de trabajo, con respecto a la referencia de postura utilizada para la compensación geométrica. Las técnicas de compensación actuales, basadas en mapas de compensación determinados estadísticamente, no tienen en cuenta este fenómeno, que puede dar lugar a errores de medición no despreciables. El documento EP 1 239 263 da a conocer un método de compensación de errores de medición debidos al envejecimiento y a fluctuaciones de temperatura, que se basa en un detector que determina si se produce, o no, un cambio en la posición de la unidad móvil con respecto a la superficie de referencia, cuando la unidad móvil es desplazada. Este método no tiene en cuenta los errores de medición debidos al cambio en la postura de la pieza de trabajo al desplazarse la unidad móvil. EXPOSICIÓN DE LA INVENCIÓN El objetivo de la presente invención es proponer un método de compensación que carezca de los inconvenientes propios de los métodos conocidos y que, en concreto, permita tener en cuenta los errores de medición inducidos por las deformaciones del banco de la máquina debidas a la carga ejercida sobre el banco de la máquina por la unidad móvil de la máquina. El mencionado propósito se consigue mediante un método de compensación acorde con la reivindicación 1. La presente invención está relacionada asimismo con una máquina de medición que funciona de acuerdo con dicho método. 2 BREVE DESCRIPCIÓN DE LOS DIBUJOS Para una mejor comprensión de la presente invención, a continuación se describe una realización preferida, proporcionada a modo de ejemplo no limitativo, haciendo referencia a los dibujos adjuntos, en los cuales: - la figura 1 es una vista esquemática en perspectiva, de una máquina de medición que funciona de acuerdo con el método de la presente invención; - la figura 2 es una vista esquemática lateral de la máquina de la figura 1, en una primera posición de la unidad móvil; - la figura 3 es una vista esquemática lateral de la máquina de la figura 2, en una segunda posición de la unidad móvil; - la figura 4 es una vista esquemática en perspectiva del banco de la máquina, que representa las deformaciones inducidas por el peso de la unidad móvil; - la figura 5 es un ejemplo de una tabla que proporciona rotaciones de cabeceo y balanceo de puntos específicos del banco de la máquina, en una posición predeterminada de la unidad móvil de la máquina; - la figura 6 es un diagrama de bloques del método de la presente invención; y - la figura 7 es un diagrama de bloques de un método de medición, que utiliza un mapa de compensación corregida obtenido utilizando el método de la invención. MEJOR MODO DE LLEVAR A CABO LA INVENCIÓN Haciendo referencia a la figura 1, mediante el 1 se indica como un todo una máquina de medición de pórtico. Se señala al mismo tiempo que el método que forma el objeto de la presente invención puede utilizarse para la compensación de errores de máquinas de diferente arquitectura, por ejemplo con columnas o brazos horizontales. La máquina 1 comprende un banco plano 2 de la máquina, dotado de una superficie de trabajo horizontal 3 y diseñado para soportar un objeto a medir (no ilustrado), y una unidad 4, que es móvil con respecto al banco 2 de la máquina a lo largo de ejes de coordenadas. La unidad 4 comprende un carro pórtico principal 5 (en lo que sigue, para mayor brevedad, "pórtico 5"), que es móvil con respecto al banco 2 de la máquina a lo largo de un eje horizontal Y. El pórtico 5 está dotado de un par de postes 6 y 7 y de un elemento transversal 8 que se extiende entre los postes 6 y 7 en una dirección paralela a un eje horizontal X y perpendicular al eje Y. La unidad 4 comprende además un carro secundario 9, soportado por el elemento transversal 8 y desplazable sobre el elemento transversal a lo largo del eje X, y una columna 10 de medición, soportada por el carro 9 y desplazable con respecto al mismo a lo largo de un eje vertical Z ortogonal a los ejes X y Y. Una sonda de contacto 11 está montada sobre un extremo inferior de la columna 10, posiblemente mediante un dispositivo de articulación de dos ejes (no mostrado). El pórtico 5, el carro 9 y la columna 10 son desplazables bajo el control de motores eléctricos respectivos (no ilustrados) que están, a su vez, controlados por una unidad 12 de control y medición. Esta última está conectada a transductores de posición (no ilustrados) asociados con los ejes de la máquina, y a la sonda 11 con objeto de recibir desde esta última señales para posibilitar la adquisición de las coordenadas instantáneas de los ejes de la máquina. La máquina 1 está equipada con un sistema para compensar errores geométricos, que es conocido por si mismo. La compensación se lleva a cabo en función de un mapa memorizado 13, determinado en condiciones sin carga mediante un modelo cinemático de la máquina, de tipo convencional. Haciendo referencia a la figura 1, sobre la superficie de trabajo 3 se identifica una posición de configuración de referencia fija REF utilizada para la compensación geométrica de la máquina. Se define además un sistema de referencia cartesiano x, y, z con ejes paralelos a los ejes X, Y, Z de la máquina y origen en el punto REF. El mapa de compensación se obtiene de manera conocida, y por lo tanto no descrita en detalle en el presente documento, detectando los parámetros de error en puntos apropiadamente determinados a cierta distancia entre sí, a lo largo de los ejes x, y, z. En cada uno de los puntos mencionados, se llevan a cabo mediciones diferenciales de 3 la posición con respecto al punto REF, por ejemplo a través de un interferómetro, y mediciones diferenciales de inclinación, por ejemplo utilizando un inclinómetro fijo situado en el punto REF y un inclinómetro montado en la unidad móvil 4. De acuerdo con la presente invención, se propone un método de compensación adicional que permitirá además la determinación de los efectos de la deformación del banco 2 de la máquina, debida a la carga ejercida por la unidad móvil 4 sobre el banco de la máquina. Para propósitos metrológicos, dichos efectos tienen como resultado básicamente una alteración de la posición y de la postura angular de la pieza de trabajo, que no son constantes con respecto a la referencia de postura REF utilizada para la compensación geométrica de la máquina. Dichas alteraciones se destacan esquemáticamente a partir de una comparación de... [Seguir leyendo]
Reivindicaciones:
1. Método de compensación de errores de medición de una máquina de medición (1) provocados por las deformaciones de un banco (2) de máquina de la máquina (1), provocadas por la carga ejercida por una unidad móvil (4) de la máquina (1) sobre dicho banco de la máquina, y estando dicho método caracterizado por comprender una primera etapa (17) de adquisición en la cual son adquiridos primeros datos relativos a la deformación del banco (2) de la máquina cuando varía la posición de la unidad móvil (4) de la máquina (1), una segunda etapa (15) de adquisición en la cual son adquiridos segundos datos relativos al modo de reposo de una pieza de trabajo (W) sobre el banco (2) de la máquina, y una tercera etapa (18) de cálculo en la cual se calculan valores de corrección en función de dichos primeros y segundos datos. 2. El método acorde con la reivindicación 1, caracterizado porque dicha tercera etapa comprende la etapa (17) de calcular datos para la corrección de un mapa (13) de compensación geométrica almacenado previamente. 3. El método acorde con la reivindicación 1 o la reivindicación 2, caracterizado porque dicha tercera etapa comprende la operación de calcular una variación de la postura de una pieza de trabajo, en función de dichos primeros y segundos datos. 4. El método acorde con la reivindicación 3, caracterizado porque la postura de la pieza se calcula en función del desplazamiento vertical de puntos del banco (2) de la máquina, que identifican la posición del mismo. 5. El método acorde con cualquiera de las reivindicaciones precedentes, caracterizado porque dichos primeros datos comprenden los desplazamientos verticales de los puntos de una cuadrícula (G) sobre una superficie de trabajo (3) de dicho banco (2) de la máquina, calculados cuando varía la posición de dicha unidad móvil (4). 6. El método acorde con cualquiera de las reivindicaciones precedentes, caracterizado porque dicha segunda etapa (15) comprende una selección entre una serie de modos de reposo estándar. 7. El método acorde con la reivindicación 6, caracterizado porque dichos modos de reposo estándar comprenden, por lo menos, un modo de reposo sobre tres puntos. 8. El método acorde con la reivindicación 6, caracterizado porque dichos modos de reposo estándar comprenden, por lo menos, un modo de reposo sobre cuatro puntos en los vértices de un rectángulo orientado en paralelo a dos ejes de coordenadas (X, Y) de la superficie de trabajo (3). 9. El método acorde con la reivindicación 6, caracterizado porque dichos modos de reposo estándar comprenden, por lo menos, un modo de reposo distribuido sobre un área rectangular orientada en una dirección paralela a dos ejes de coordenadas (X, Y) de la superficie de trabajo (3). 10. El método acorde con cualquiera de las reivindicaciones precedentes, caracterizado porque dichos valores de corrección se calculan en función de un modelo simplificado que toma en cuenta solamente las rotaciones de la pieza de trabajo (W) con respecto a los ejes de coordenadas (X, Y) de la superficie de trabajo. 11. Una máquina de medición que comprende un banco (3) de la máquina y una unidad móvil (4) para desplazar un sensor de medición (11) con respecto a dicho banco (2) de la máquina, estando dicha máquina caracterizada por comprender un sistema para compensar los errores de medición derivados de las deformaciones del banco (2) de la máquina, provocadas por la carga ejercida por la unidad móvil (4) sobre el banco (2) de la máquina, funcionando dicho sistema de acuerdo con el método especificado en cualquiera de las reivindicaciones precedentes. 8 9 11 12
Patentes similares o relacionadas:
COMPENSACIÓN DE ERRORES DE MEDICIÓN DEBIDOS A DEFORMACIONES DINÁMICAS EN UNA MÁQUINA DE MEDICIÓN DE COORDENADAS, del 27 de Mayo de 2011, de HEXAGON METROLOGY S.P.A: Una máquina de medición que comprende una unidad móvil para desplazar un sensor de medición dentro de un volumen de medición, comprendiendo la unidad móvil al […]
DISPOSITIVO DE MEDICIÓN DE COTAS GEOMÉTRICAS, del 2 de Julio de 2020, de EMPRESA DE TRASPORTE MASIVO DEL VALLE DE ABURRA LTDA. - METRO DE MEDELLIN LTDA: La presente invención se refiere a dispositivos y métodos de medición de cotas geométricas en cables de un teleférico para verificar que el desplazamiento del cable […]
Sistema de medición óptica, del 10 de Junio de 2020, de METRONOR A/S: Un sistema para la medición de coordenadas espaciales y/o la orientación de una sonda , que comprende:
a) un primer sensor de dirección espacial […]
Procedimiento y sistema para la calibración de un sistema de visión por ordenador, del 1 de Abril de 2020, de Oy Mapvision Ltd: Procedimiento para la calibración de un sistema de visión por ordenador tridimensional, comprendiendo dicho procedimiento las etapas de:
disponer […]
Dispositivo de control tridimensional sin contacto de una pieza hueca con superficie interna de revolución y procedimiento correspondiente, del 1 de Abril de 2020, de DWFritz Automation, Inc: Dispositivo de control tridimensional sin contacto de una pieza hueca con superficie interna de revolución, denominada pieza hueca que va a controlarse, comprendiendo […]
Detección de posición, del 18 de Marzo de 2020, de Airbus Operations Limited: Aparato para determinar la posición de un objeto que tiene uno o más elementos magnéticos , el aparato comprende una […]
Método y sistema para inspeccionar una pieza de trabajo, del 18 de Marzo de 2020, de THE BOEING COMPANY: Un método para inspeccionar una pieza de trabajo , comprendiendo dicho método:
la introducción de datos del modelo asociado con la pieza de trabajo […]
Métodos y sistemas de unión ala-fuselaje, del 29 de Enero de 2020, de THE BOEING COMPANY: Un metodo de union ala-fuselaje para una aeronave , comprendiendo el metodo:
(a) calcular un ajuste virtual entre un conjunto […]
Utilizamos cookies para mejorar nuestros servicios y mostrarle publicidad relevante. Si continua navegando, consideramos que acepta su uso. Puede obtener más información aquí. .
 COMPENSACIÓN DE ERRORES DE MEDICIÓN DEBIDOS A DEFORMACIONES DINÁMICAS EN UNA MÁQUINA DE MEDICIÓN DE COORDENADAS, del 27 de Mayo de 2011, de HEXAGON METROLOGY S.P.A: Una máquina de medición que comprende una unidad móvil para desplazar un sensor de medición dentro de un volumen de medición, comprendiendo la unidad móvil al […]
COMPENSACIÓN DE ERRORES DE MEDICIÓN DEBIDOS A DEFORMACIONES DINÁMICAS EN UNA MÁQUINA DE MEDICIÓN DE COORDENADAS, del 27 de Mayo de 2011, de HEXAGON METROLOGY S.P.A: Una máquina de medición que comprende una unidad móvil para desplazar un sensor de medición dentro de un volumen de medición, comprendiendo la unidad móvil al […] Métodos y sistemas de unión ala-fuselaje, del 29 de Enero de 2020, de THE BOEING COMPANY: Un metodo de union ala-fuselaje para una aeronave , comprendiendo el metodo:
(a) calcular un ajuste virtual entre un conjunto […]
Métodos y sistemas de unión ala-fuselaje, del 29 de Enero de 2020, de THE BOEING COMPANY: Un metodo de union ala-fuselaje para una aeronave , comprendiendo el metodo:
(a) calcular un ajuste virtual entre un conjunto […]