COMPENSACIÓN DE ERRORES DE MEDICIÓN DEBIDOS A DEFORMACIONES DINÁMICAS EN UNA MÁQUINA DE MEDICIÓN DE COORDENADAS.
Una máquina de medición que comprende una unidad móvil (7) para desplazar un sensor de medición (3) dentro de un volumen de medición,
comprendiendo la unidad móvil (7) al menos un miembro (8; 12; 42; 56) que se mueve a lo largo de un eje bajo el empuje de un medio de accionamiento (13) y que está sometida a unas deformaciones dinámicas, comprendiendo dicha máquina un sensor láser (16) provisto de un emisor láser (22) fijado a una primera porción del miembro móvil y una diana (28) fijada sobre una segunda porción de dicho miembro móvil (8; 12; 42; 56) y diseñada para recibir un haz (26) de rayos láser generado por dicho emisor (22), estando dichas primera y segunda porciones sometidas a un desplazamiento relativo como consecuencia de dichas deformaciones dinámicas, y un medio (14) para compensar los errores de medición de dicha máquina (1) como consecuencia de dichas deformaciones dinámicas de dicha unidad móvil (7) en respuesta al desplazamiento de un punto de incidencia del haz (26) de rayos láser sobre la diana (28) con respecto a una posición de referencia en estados no deformados
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/IB2007/004109.
Solicitante: HEXAGON METROLOGY S.P.A.
Nacionalidad solicitante: Italia.
Dirección: VIA VITTIME DI PIAZZA DELLA LOGGIA 6 10024 MONCALIERI ITALIA.
Inventor/es: RUSSO,DOMENICO, GUASCO,GIAMPIERO, VERDI,Michele.
Fecha de Publicación: .
Fecha Solicitud PCT: 27 de Diciembre de 2007.
Clasificación Internacional de Patentes:
- G01B21/04C
- G01B5/008 FISICA. › G01 METROLOGIA; ENSAYOS. › G01B MEDIDA DE LA LONGITUD, ESPESOR O DIMENSIONES LINEALES ANALOGAS; MEDIDA DE ANGULOS; MEDIDA DE AREAS; MEDIDA DE IRREGULARIDADES DE SUPERFICIES O CONTORNOS. › G01B 5/00 Disposiciones de medida caracterizadas por la utilización de medios mecánicos (instrumentos de los tipos cubiertos por el grupo G01B 3/00 en sí G01B 3/00). › que utilizan máquinas de medida de coordenadas.
Clasificación PCT:
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
PDF original: ES-2359801_T3.pdf
Fragmento de la descripción:
Campo técnico
La presente invención se refiere a una máquina de medición de las coordenadas y a un procedimiento para la compensación de los errores de medición debido a las deformaciones dinámicas.
Estado de la técnica anterior
Como es sabido, las máquinas de medición de las coordenadas en general comprenden tres carros móviles a lo largo de los ejes de las coordenadas de un sistema de referencia cartesiano y diseñadas para desplazar un sensor de la medición dentro de un volumen de la medición. La máquina está diseñada para generar de salida las coordenadas de una pieza detectada por un sensor de la medición, calculadas como una función de la posición de los carros a lo largo de los ejes respectivos.
Más en concreto, la máquina de medición de las coordenadas comprende: una estructura de base provista de unas guías a lo largo de un primer eje, por ejemplo, una plataforma de granito o de otro material o si no, de una estructura de pilares; un primer carro, el cual se mueve sobre la estructura de base a lo largo del primer eje; un segundo carro, que es soportado por el primer carro y se mueve a lo largo de un segundo eje ortogonal con respecto al primer eje; y un tercer carro, el cual es soportado por el segundo carro y se mueve con respecto a aquél a lo largo de un tercer eje ortogonal con respecto a los dos primeros ejes. El sensor de medición es soportado por el tercer carro.
El primer eje es genéricamente horizontal; de acuerdo con el tipo de máquina, el segundo eje puede ser horizontal y el tercer eje vertical, o viceversa.
Por ejemplo, en máquinas del tipo de puente o pórtico, el primer carro comprende un miembro transversal horizontal que define el segundo eje sobre el cual se desliza el segundo carro, y el tercer carro está constituido por una columna, la cual es soportada por el segundo carro y es verticalmente móvil.
En máquinas del tipo de brazo horizontal, por el contrario, el primer carro comprende una columna vertical que define el segundo eje, a lo largo del cual se desliza el segundo carro, y el tercer carro está constituido por un brazo vertical, el cual es soportado por el segundo carro y es horizontalmente móvil.
Para el desplazamiento de los carros se utilizan motores eléctricos, los cuales transmiten las fuerzas de accionamiento a los carros por medio de unos mecanismos apropiados o, como alternativa, unos motores eléctricos lineales fijados con respecto al carro.
Las aceleraciones necesarias para llevar a cabo los ciclos de medición en tiempos cada vez más cortos requieren unas fuerzas de accionamiento elevadas, destinadas a inducir unas deformaciones elásticas de las piezas móviles de la máquina debido al efecto dinámico (inercial). Dichas deformaciones, las cuales son, así mismo, debidas a la estructura aligerada de las piezas móviles, pueden ser importantes para la precisión de la medición.
Con el fin de garantizar la clase de precisión de la máquina de medición, el error de la medición provocado por la deformación elástica debe ser estimado y, a continuación, compensado.
El documento US 2005/0102118 divulga el uso del láser en la determinación y compensación de los errores resultantes de las deformaciones elásticas en máquinas de medición de las coordenadas. Un emisor láser y un sensor se disponen sobre un miembro móvil de la máquina de medición de las coordenadas, con un reflector sobre un plano de referencia. La determinación y compensación de los errores se lleva a cabo sobre el desplazamiento relativo del reflector, por un lado, y por el emisor y el sensor, por el otro.
Objetivo de la invención
El objetivo de la presente invención consiste en proporcionar una máquina de medición que haga posible la estimación precisa de los errores de medición debidos a las deformaciones mecánicas, así como un procedimiento para la compensación de los citados errores.
Los fines expuestos se consiguen mediante una máquina de medición de acuerdo con la Reivindicación 1, y mediante un procedimiento de acuerdo con la Reivindicación 9.
Breve descripción de los dibujos
Para una mejor comprensión de la invención, descrita en los apartados que siguen, se incorporan algunas formas de realización preferentes, ofrecidas a modo de ejemplos no limitativos y con referencia a los dibujos adjuntos, en los que:
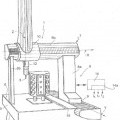
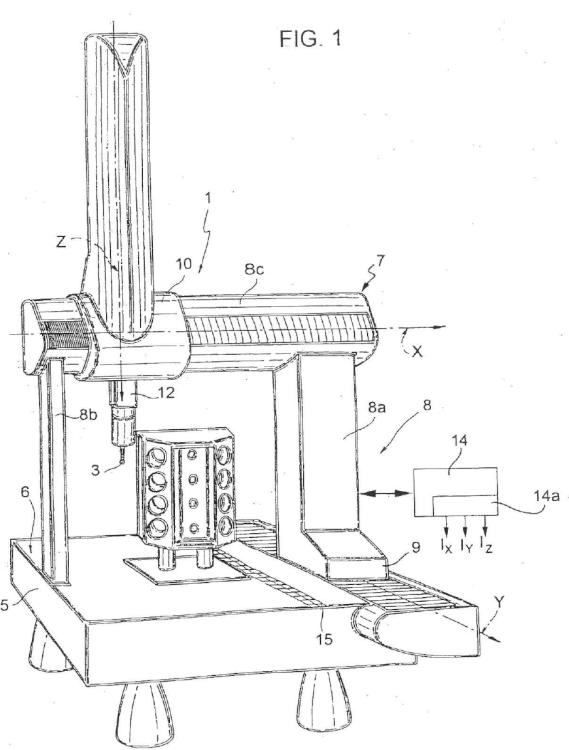
La Figura 1 ilustra una máquina de medición de puente de acuerdo con la presente invención;
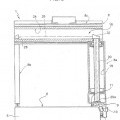
la Figura 2 es una vista frontal en sección transversal parcial de la máquina de la Figura 1;
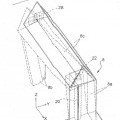
la Figura 3 es una vista en perspectiva esquemática de un carro de la máquina de la Figura 1, en un primer modo de deformación dinámica;
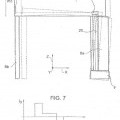
la Figura 4 es una vista frontal esquemática del carro de la Figura 3 en un segundo modo de deformación dinámica;
la Figura 5 es un diagrama de bloques de un procedimiento para la compensación de las deformaciones dinámicas que puede ser utilizado en una máquina de medición de acuerdo con la presente invención;
la Figura 6 es un diagrama de bloques de un modelo para la puesta en práctica del procedimiento;
la Figura 7 muestra unos gráficos de tiempo de cantidades físicas correlacionadas con un ciclo de movimientos del carro de la Figura 3;
la Figura 8 es una vista en perspectiva esquemática del carro de la máquina de medición de la Figura 1, de acuerdo con una forma de realización diferente de la invención;
la Figura 9 es una vista en perspectiva esquemática de una columna de la máquina de la Figura 1, de acuerdo con una forma de realización en variante de la presente invención;
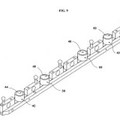
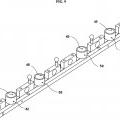
la Figura 10 es una vista en perspectiva esquemática de una máquina de medición de brazo horizontal fabricada de acuerdo con la presente invención;
la Figura 11 es una vista en perspectiva esquemática y parcial de una máquina de pórtico fabricada de acuerdo con al presente invención.
Forma de realización preferente de la invención
En la primera forma de realización descrita, la máquina de medición 1 es del tipo de puente y comprende una plataforma 5 provista de unas superficie superior 6 del plano horizontal o superficie de referencia y una unidad móvil
7.
La unidad móvil 7 comprende un carro 8 accionado por motor, el cual se desliza sobre la plataforma 5 a lo largo de un primer eje horizontal (eje Y) de un sistema de referencia cartesiano (X, Y, Z) del volumen de medición.
El carro 8 presenta una estructura de puente y comprende dos montantes verticales 8a, 8b y un miembro transversal horizontal superior 8c que se extiende entre los extremos superiores de los montantes verticales 8a, 8b.
El montaje 8a comprende, en su extremo inferior, una corredera 9 accionada por motor, la cual puede deslizarse sobre unas guías 11 paralelas al eje Y e incorporada, de la forma conocida, en las inmediaciones de un borde longitudinal de la plataforma 5.
El miembro transversal 8c soporta una corredera 10 que se desliza sobre unas guías (no mostradas) a lo largo de un eje paralelo con un segundo eje (eje X) del sistema de referencia.
Montada sobre la corredera 10 se encuentra una columna vertical 12 que se mueve a lo largo de un eje (eje Z) del sistema de referencia. La columna vertical 12 soporta, en su extremo inferior, un sensor de medición 3 (de tipo conocido).
El carro 8, la corredera 10 y la columna 12 están provistos de unos respectivos motores 13, por ejemplo, unos motores lineales (de los cuales solo uno es visible en la Figura 2), los cuales controlan su desplazamiento a lo largo de los respectivos ejes de coordenadas.
La máquina de medición 1 es controlada por una unidad de control 14 provista de una sección motora 14a, la cual suministra las corrientes de suministro lY, lX, lZ a los motores eléctricos de los respectivos carros 8, 10, 12 para el desplazamiento del sensor de medición 3 a lo largo de los ejes Y , X y Z y, de ahí, su posicionamiento dentro del volumen de medición.
La máquina de medición 1 genera de salida -por medio de un software basado en algoritmos de tipo conocido-la posición xa, ya, za del sensor de medición 3 dentro del volumen de medición, mediante la detección de la posición de las correderas a lo largo de los respectivos ejes X, Y y Z.
En las condiciones... [Seguir leyendo]
Reivindicaciones:
1. Una máquina de medición que comprende una unidad móvil (7) para desplazar un sensor de medición (3) dentro de un volumen de medición, comprendiendo la unidad móvil (7) al menos un miembro (8; 12; 42; 56) que se mueve a lo largo de un eje bajo el empuje de un medio de accionamiento (13) y que está sometida a unas deformaciones dinámicas, comprendiendo dicha máquina un sensor láser (16) provisto de un emisor láser (22) fijado a una primera porción del miembro móvil y una diana (28) fijada sobre una segunda porción de dicho miembro móvil (8; 12; 42; 56) y diseñada para recibir un haz (26) de rayos láser generado por dicho emisor (22), estando dichas primera y segunda porciones sometidas a un desplazamiento relativo como consecuencia de dichas deformaciones dinámicas, y un medio (14) para compensar los errores de medición de dicha máquina (1) como consecuencia de dichas deformaciones dinámicas de dicha unidad móvil (7) en respuesta al desplazamiento de un punto de incidencia del haz (26) de rayos láser sobre la diana (28) con respecto a una posición de referencia en estados no deformados.
2. La máquina de acuerdo con la reivindicación 1, en la que dicha diana (28) es un Dispositivo de Detección de Posición.
3. La máquina de acuerdo con las reivindicaciones 1 o 2, en la que dicho miembro móvil comprende un elemento en forma miembro móvil (10, 12, 56), estando dicho emisor (22) y dicha diana (28) fijados en los extremos opuestos de dicho elemento en forma de miembro móvil (10).
4. La máquina de acuerdo con las reivindicaciones 1 o 2, en la que dicho miembro móvil (8) comprende al menos un primer elemento (8a) que presenta un primer extremo y un segundo extremo, y un segundo extremo (8c) que presenta un primer extremo y un segundo extremo, estando dichos primero y segundo elementos (8a, 8c) conectados entre sí en un área correspondiente al respectivo primer extremo, siendo dichos primero y segundo elementos huecos, estando dicho emisor (22) dispuesto en dichos primeros extremos de dicho segundo elemento (8c) y estando fijado a un soporte rígido (20), el cual es fijo con respecto a un segundo extremo (9) de dicho primer elemento (8a), estando dicha diana (28) fijada a dicho segundo extremo de dicho segundo elemento (8c).
5. La máquina de acuerdo con una cualquiera de las reivindicaciones precedentes, en la que dicho sensor láser (16) está alojado dentro de dicho miembro móvil (8c; 56), extendiéndose dicho haz (26) de rayos láser a través de una cavidad (24) de dicho miembro móvil.
6. La máquina de acuerdo con una cualquiera de las reivindicaciones precedentes, en la que dicho miembro móvil
(8) es un carro, que se mueve sobre una plataforma (5) y presenta una estructura de puente provista de dos montantes (8a, 8b) y un miembro transversal (8c), comprendiendo un primer montante (8a) de dicho carro una corredera (9) accionada por motor, la cual puede deslizarse sobre dicha plataforma (5).
7. La máquina de acuerdo con la Reivindicación 6 cuando dependa de la Reivindicación 4, en la que dicho primer elemento está constituido por dicho primer montante (8a) y en la que el segundo elemento está constituido por dicho miembro transversal (8c); estando dicho soporte rígido constituido por una barra (20) que se extiende por dentro del primer montante (8a) que presenta un primer extremo inferior (20a) fijado a dicha corredera (9) de dicho primer montante (8a) y un extremo superior que se extiende por dentro de dicho miembro transversal (8c) en un primero de sus extremos, estando dicho emisor (22) fijado sobre dicho extremo superior de dicha barra (20), estando dicho receptor fijado dentro de dicho miembro transversal (24), en su extremo opuesto.
8. La máquina de acuerdo con la Reivindicación 6 cuando dependa de la Reivindicación 4, en la que dicho primer elemento es dicho miembro transversal (8c) y dicho segundo elemento es dicho segundo montante (8b), estando dicho soporte rígido constituido por una barra (31) que se extiende por dentro de una cavidad longitudinal (24) del miembro transversal (8c) y que presenta un extremo fijo sobre dicho primer montante (8a), estando dicho emisor
(22) fijado sobre un extremo opuesto de dicha barra (31), y estando dicha diana (28) alojada en un pie de dicho segundo montante (8b).
9. Un procedimiento para la compensación de los errores de medición debidos a las deformaciones mecánicas en una máquina de medición (1) provista de una unidad móvil (7) para desplazar un sensor de medición (3) dentro de un volumen de medición, comprendiendo la unidad móvil (7) al menos un primer miembro (8; 12; 42; 56) móvil a lo largo de un eje bajo el empuje de un medio de accionamiento (13) y estando sometido a unas deformaciones dinámicas, comprendiendo el procedimiento las etapas de:
la generación de un haz (26) de rayos láser por medio de un emisor (22) fijado a una primera porción de un miembro móvil (8; 12; 42; 56) de dicha unidad móvil (7);
la detección del desplazamiento de un punto de incidencia del haz (26) de rayos láser sobre una diana (28) fijada sobre una segunda porción de dicho miembro móvil (8; 12; 42; 56) con respecto a una posición de referencia correspondiente a un estado no deformado de dicha unidad móvil (7); y
la compensación de los errores de medición de la máquina de medición (1) como una función de al menos dicho desplazamiento.
10. El procedimiento de acuerdo con la Reivindicación 9, en el que dicha etapa de detección del desplazamiento del punto de incidencia del haz de rayos láser se lleva a cabo por medio de un PSD (28) que define dicha diana.
11. El procedimiento de acuerdo con las Reivindicaciones 9 o 10, en el que dicha etapa de compensación de los
**(Ver fórmula)**
errores de medición se obtiene por medio de un filtro estimador ( ), el cual suministra una estimación del error de 5 medición en respuesta a los valores medidos de las cantidades de entrada (u) y de los valores medidos de un subconjunto de unidades de salida (y) que comprende dicho desplazamiento del punto de incidencia de dicho haz de rayos láser.
Patentes similares o relacionadas:
 Aparato y procedimiento de formación de imágenes intracraneales, del 30 de Octubre de 2019, de Archeoptix Biomedical Inc: Un aparato de formación de imágenes, que comprende:
una red de al menos tres transceptores electromagnéticos coplanarios que definen un plano de recepción;
al menos […]
Aparato y procedimiento de formación de imágenes intracraneales, del 30 de Octubre de 2019, de Archeoptix Biomedical Inc: Un aparato de formación de imágenes, que comprende:
una red de al menos tres transceptores electromagnéticos coplanarios que definen un plano de recepción;
al menos […]
Metrología de alta velocidad con máquinas numéricamente controladas, del 25 de Abril de 2018, de Grale Technologies: Un sistema que comprende: un dispositivo de metrología unido a un brazo de herramienta operativa y configurado para medición, para un ciclo de movimiento […]
 Método de calibración de un modelo matemático para una máquina de medición de coordenadas para la compensación de errores dinámicos debidos a la deformación, del 10 de Febrero de 2016, de HEXAGON METROLOGY S.P.A: 1. Un método de calibración de un modelo matemático de una máquina de medición para la compensación de errores debidos a deformación dinámica, que […]
Método de calibración de un modelo matemático para una máquina de medición de coordenadas para la compensación de errores dinámicos debidos a la deformación, del 10 de Febrero de 2016, de HEXAGON METROLOGY S.P.A: 1. Un método de calibración de un modelo matemático de una máquina de medición para la compensación de errores debidos a deformación dinámica, que […]
Máquina de medición de coordenadas, del 21 de Enero de 2015, de HEXAGON METROLOGY S.P.A: Una máquina de medición de coordenadas que comprende una base provista de primeros medios de guía a lo largo de un primer eje horizontal […]
 MÁQUINA DE CONTROL NUMÉRICO DESMONTABLE, del 17 de Diciembre de 2014, de UNIMETRIK, S.A: Máquina de control numérico desmontable que comprende una primera bancada longitudinal , una base , una columna solidariamente unida a la base , un carro […]
MÁQUINA DE CONTROL NUMÉRICO DESMONTABLE, del 17 de Diciembre de 2014, de UNIMETRIK, S.A: Máquina de control numérico desmontable que comprende una primera bancada longitudinal , una base , una columna solidariamente unida a la base , un carro […]
 MÁQUINA DE CONTROL NUMÉRICO DESMONTABLE, del 20 de Noviembre de 2014, de UNIMETRIK, S.A: Máquina de control numérico desmontable que comprende una primera bancada longitudinal , una base , una columna solidariamente unida a la base , un […]
MÁQUINA DE CONTROL NUMÉRICO DESMONTABLE, del 20 de Noviembre de 2014, de UNIMETRIK, S.A: Máquina de control numérico desmontable que comprende una primera bancada longitudinal , una base , una columna solidariamente unida a la base , un […]
 MÉTODO Y PATRÓN DE CARACTERÍSTICAS GEOMÉTRICAS PARA CALIBRACIÓN Y VERIFICACIÓN DE LA MEDICIÓN CON BRAZOS ARTICULADOS DE MEDIR POR COORDENADAS, del 12 de Septiembre de 2014, de UNIVERSIDAD DE OVIEDO: Método y patrón de características geométricas para la verificación y calibración de la medición con brazos articulados de medir por coordenadas, que comprende […]
MÉTODO Y PATRÓN DE CARACTERÍSTICAS GEOMÉTRICAS PARA CALIBRACIÓN Y VERIFICACIÓN DE LA MEDICIÓN CON BRAZOS ARTICULADOS DE MEDIR POR COORDENADAS, del 12 de Septiembre de 2014, de UNIVERSIDAD DE OVIEDO: Método y patrón de características geométricas para la verificación y calibración de la medición con brazos articulados de medir por coordenadas, que comprende […]
 Método y patrón de características geométricas para calibración y verificación de la medición con brazos articulados de medir por coordenadas, del 4 de Septiembre de 2014, de UNIVERSIDAD DE OVIEDO: Método y patrón de características geométricas para la verificación y calibración de la medición con brazos articulados de medir por coordenadas, que comprende esferas macizas, […]
Método y patrón de características geométricas para calibración y verificación de la medición con brazos articulados de medir por coordenadas, del 4 de Septiembre de 2014, de UNIVERSIDAD DE OVIEDO: Método y patrón de características geométricas para la verificación y calibración de la medición con brazos articulados de medir por coordenadas, que comprende esferas macizas, […]