MAQUINA DE MEDICION POR COORDENADAS DE BRAZO HORIZONTAL.
Máquina de medición por coordenadas (1) que comprende una base (2) provista de primeras guías (3) a lo largo de un primer eje horizontal (X),
un primer carro (4) móvil sobre la base (2) a lo largo de dicho primer eje (X) y que comprende un montante (17) provisto de segundas guías (5) que se extienden a lo largo de un segundo eje vertical (Z), un segundo carro (6) portado por el montante (17) y que se desliza por dicho segundo eje (Z), un brazo horizontal (7) portado por el segundo carro (6), que se extiende a lo largo de un tercer eje (Y) horizontal y ortogonal al primer eje (X) y móvil a lo largo de dicho tercer eje (Y), y un contrapeso (28) alojado dentro de dicho montante (17) móvil en dirección paralela a dicho segundo eje (Z) y asegurado a dicho segundo carro (6) mediante un miembro de transmisión flexible (29), caracterizada porque dicho contrapeso (28) es guiado dentro de dicho montante (17) por una pluralidad de ruedas (33, 34) portadas por el contrapeso (28)
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/IT2006/000255.
Solicitante: HEXAGON METROLOGY S.P.A.
Nacionalidad solicitante: Italia.
Dirección: VIA VITTIME DI PIAZZA DELLA LOGGIA 6,10024 MONCALIERI.
Inventor/es: GARAU,ENRICO.
Fecha de Publicación: .
Fecha Concesión Europea: 13 de Enero de 2010.
Clasificación Internacional de Patentes:
- G01B5/008 FISICA. › G01 METROLOGIA; ENSAYOS. › G01B MEDIDA DE LA LONGITUD, ESPESOR O DIMENSIONES LINEALES ANALOGAS; MEDIDA DE ANGULOS; MEDIDA DE AREAS; MEDIDA DE IRREGULARIDADES DE SUPERFICIES O CONTORNOS. › G01B 5/00 Disposiciones de medida caracterizadas por la utilización de medios mecánicos (instrumentos de los tipos cubiertos por el grupo G01B 3/00 en sí G01B 3/00). › que utilizan máquinas de medida de coordenadas.
Clasificación PCT:
Fragmento de la descripción:
Máquina de medición por coordenadas de brazo horizontal.
Campo de la invención
La presente invención hace referencia a una máquina de medición por coordenadas de brazo horizontal.
Antecedentes de la invención
Las máquinas de medición por coordenadas del tipo antes mencionado son conocidas, y comprenden una base con guías a lo largo de un eje horizontal X, un primer carro móvil en la base a lo largo del eje X, y comprenden un montante con guías que se extienden a lo largo de un segundo eje vertical, un segundo carro portado por el montante y que se desliza sobre el mismo a lo largo del eje Z, y un brazo portado por el segundo carro y que se extiende por un tercer eje horizontal Y ortogonal al eje X. Un extremo del brazo se adapta para llevar un contacto o detector óptico para medir características dimensionales de piezas.
Para mantener balanceado el segundo carro, las máquinas del tipo antes mencionado generalmente tienen un contrapeso asegurado al segundo carro mediante una correa y que se desliza dentro del montante. Dicha máquina de medición por coordenadas se conoce a partir del documento US 5,072,522.
Más específicamente, el montante se provee internamente con las guías verticales a lo largo de las cuales se mueve el contrapeso.
Esta solución implica costes de fabricación altos ya que el montante debe manejarse con la debida precisión, lo cual generalmente se realiza mediante extrusión, para obtener las superficies de apoyo para las guías, y debido al coste de las guías.
Revelación de la invención
Por lo tanto, el objeto de la presente invención es realizar una máquina de medición por coordenadas de brazo horizontal que permite resolver el problema técnico antes mencionado.
El presente objeto se logra mediante una máquina de medición según la reivindicación 1.
Breve descripción de los dibujos
A continuación se describe una realización preferente de la invención, sólo a modo de ejemplo no limitativo, para una mejor comprensión de la invención, con referencia a los siguientes dibujos, en los cuales:
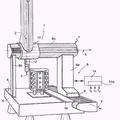
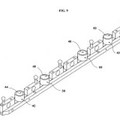
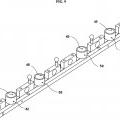
La figura 1 es una vista en perspectiva de una máquina de medición por coordenadas de brazo horizontal, según la presente invención;
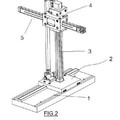
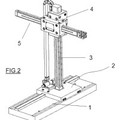
La figura 2 es una vista superior de un montante de la máquina en la figura 1;
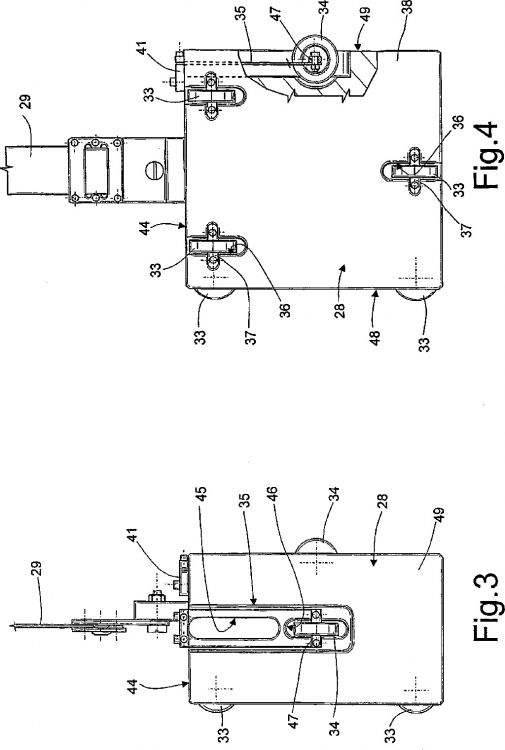
Las figuras 3 y 4 son vistas elevadas, lateral y trasera, respectivamente, de un contrapeso de la máquina en la figura 1.
Modo de realización preferente de la invención
En la figura 1, una máquina de medición por coordenadas de brazo horizontal se indica con el número 1.
La máquina 1 esencialmente comprende una base 2 provista de guías 3 a lo largo de un eje horizontal X, un primer carro 4 móvil sobre la base 2 a lo largo del eje X y provisto de guías 5 que se extienden a lo largo del eje vertical Z, un segundo carro 6 portado por el primer carro 4 y que se desliza por el eje Z, y un brazo horizontal 7 que es sostenido por el segundo carro 6, que se extiende a lo largo de un eje Y ortogonal al eje X y axialmente móvil a lo largo del eje Y. Un extremo del brazo 7 se adapta para llevar un contacto o detector óptico (no se muestra) para medir características dimensionales de las piezas.
Con más detalle, la base 2 esencialmente consiste en una estructura tipo caja 10 alargada en la dirección del eje X, con una sección constante, que tiene una pared inferior horizontal plana 11 y una pared superior 12, y un par de paredes laterales paralelas recíprocas y verticales 13, 14. Las paredes laterales 13, 14 se encuentran espaciadas recíprocamente a una distancia más pequeña que el ancho de las paredes 11, 12, de modo tal que se proyectan lateralmente a partir de las paredes laterales 13, 14 con alas laterales respectivas 15.
Las guías deslizantes 3 para el montante 4 a lo largo del eje X están fijas debajo de las alas laterales 15 de la pared superior 12, que por lo tanto presenta una superficie superior plana tipo suelo, sin guías ni componentes delicados.
El primer carro 4 comprende una base inferior 16 móvil sobre las guías 3 y un montante 17 que tiene una estructura tubular de eje vertical que se extiende en forma ascendente desde la base 16 y porta las guías 5 del carro 6.
Más específicamente, la base 16 consiste en un cuerpo central 18 unido de manera rígida al montante 17 y un par de rebordes laterales 19, 20 unidos en los lados opuestos del cuerpo central 18 y cada uno de ellos se desliza a lo largo de una guía 3 respectiva mediante deslizadoras (no se muestran), por ejemplo del tipo de circulación de bolas o neumáticas estáticas.
El montante 17 (figura 2) tiene una estructura tubular, de sección constante, y está hecha convenientemente de una sección en C 23 que define una pared trasera 24 y paredes laterales respectivas 25 del montante 17, y una placa frontal 26 ajustada, preferentemente soldada, a lo largo de los laterales libres de la sección 23.
Las guías 5 del segundo carro 6 se ajustan frontalmente a la placa frontal del montante 17 y cooperan con las deslizadoras 21, por ejemplo del tipo de circulación de bolas o neumáticas estáticas que son portadas por el segundo carro 6.
La sección 23 y la placa frontal 26 delimitan una cavidad interna 27 del montante 17, de sección esencialmente rectangular.
Dentro de dicha cavidad 27 se encuentra un contrapeso 28, que está asegurado al segundo carro 6 mediante una correa 29. Más específicamente, la correa 29 tiene extremos ajustados al segundo carro 6 (figura 1) y al contrapeso 28 (figuras 3 y 4), respectivamente, y está bobinada alrededor de una polea tensora 30 (figura 2) ubicada cerca de un extremo superior del montante 17 y que gira alrededor de un eje 31 con eje horizontal A paralelo al eje Y.
El contrapeso 28 (figuras 3 y 4) presenta una forma esencialmente paralelepípeda y es guiado dentro de la cavidad 27 del montante 17 mediante una pluralidad de ruedas 33, 34 portadas por el contrapeso y colocadas en contacto directo con las paredes del montante 17. Algunas de las ruedas, indicadas con el número 33, tienen un eje fijo; mientras que las otras, indicadas con el número 34, se encuentran en resortes de hojas múltiples 35 respectivos adaptados para generar una precarga elástica. En forma paralela a los ejes X e Y, el contrapeso 28 tiene como soporte en una dirección una pluralidad de ruedas de eje fijo 33, y en la otra dirección, una rueda 34, para garantizar una buena separación.
En particular, en la cara trasera 38 del contrapeso 28 (figura 4) se encuentran dos ruedas de eje fijo 33, dos de las cuales están cerca de las esquinas superiores de la cara 38 y una en la línea central cerca del lado inferior de la cara. Dichas ruedas 33 definen soportes unidireccionales respectivos contra la pared trasera 24 del montante 17 (figura 2).
El soporte elástico en la dirección opuesta, es decir, contra la placa frontal 26 del montante 17 se define por una rueda 34 soportada por el resorte respectivo 35 en el medio de la cara frontal 40 del contrapeso 28.
Dos ruedas 33 están montadas en una cara lateral 48 del contrapeso, en la línea central de la cara 48 y cerca de los lados superior e inferior de ésta. Dichas ruedas definen soportes respectivos contra una pared lateral 25 del montante 17. Una rueda 34 se encuentra soportada por un resorte respectivo 35 en la posición central en una cara lateral 49 opuesta al contrapeso 28, y rueda al entrar en contacto con la pared lateral 25 opuesta al montante 17.
Las ruedas 33 están montadas en entrantes respectivos 36 del contrapeso 28 y giran alrededor de clavijas 37 embutidas en el contrapeso 28 y ajustadas a éste.
Los resortes 35 de las ruedas 34 se ajustan en forma sobresaliente al bloque respectivo 41 ajustado a una cara superior 44 del contrapeso 28 y se extienden paralelamente a la cara respectiva 40, 49 del contrapeso 28.
Cada resorte 35 (figura 3 y 4), de forma esencialmente rectangular alargada en dirección vertical, presenta una ranura superior 45 y una ranura inferior 46, a través de y recíprocamente alineada a la línea central longitudinal del resorte. La rueda 34 se acomoda en la ranura inferior 46 y gira alrededor de un eje 47 ajustado como un puente sobre la propia ranura.
El sistema de anclaje determinado por las ruedas 33 y 34 es isostático y elimina todos los grados de libertad, excepto por la traslación del eje Z; sin embargo, el sistema de anclaje es elástico, y por lo...
Reivindicaciones:
1. Máquina de medición por coordenadas (1) que comprende una base (2) provista de primeras guías (3) a lo largo de un primer eje horizontal (X), un primer carro (4) móvil sobre la base (2) a lo largo de dicho primer eje (X) y que comprende un montante (17) provisto de segundas guías (5) que se extienden a lo largo de un segundo eje vertical (Z), un segundo carro (6) portado por el montante (17) y que se desliza por dicho segundo eje (Z), un brazo horizontal (7) portado por el segundo carro (6), que se extiende a lo largo de un tercer eje (Y) horizontal y ortogonal al primer eje (X) y móvil a lo largo de dicho tercer eje (Y), y un contrapeso (28) alojado dentro de dicho montante (17) móvil en dirección paralela a dicho segundo eje (Z) y asegurado a dicho segundo carro (6) mediante un miembro de transmisión flexible (29), caracterizada porque dicho contrapeso (28) es guiado dentro de dicho montante (17) por una pluralidad de ruedas (33, 34) portadas por el contrapeso (28).
2. Máquina según la reivindicación 1, caracterizada porque las ruedas (33, 34) del contrapeso ruedan en contacto directo con las paredes laterales (24, 25, 25) del montante (17).
3. Máquina según la reivindicación 2, caracterizada porque dichas paredes laterales (25, 26, 27) del montante (17) están libres de guías para el contrapeso (28).
4. Máquina según cualquiera de las reivindicaciones precedentes, caracterizada porque dichas ruedas (33, 34) están dispuestas de forma tal que definen un sistema de anclaje que elimina todos los grados de libertad de dicho contrapeso (28), salvo por el movimiento a lo largo de dicho tercer eje.
5. Máquina según la reivindicación 4, caracterizada porque dicho sistema de anclaje es isostático.
6. Máquina según cualquiera de las reivindicaciones precedentes, caracterizada porque paralelamente a dicho primer eje (X) y a dicho tercer eje (Y) el contrapeso (28) está soportado en una dirección por una pluralidad de primeras ruedas (33) de eje fijo y en la otra por una segunda rueda (34), soportada elásticamente sobre dicho contrapeso (28).
7. Máquina según la reivindicación 6, caracterizada porque dichas segundas ruedas (34) están montadas sobre resortes de hojas múltiples (35) respectivos.
8. Máquina según cualquiera de las reivindicaciones precedentes, caracterizada porque dicho montante (17) presenta una cavidad de sección rectangular (27) que aloja dicho contrapeso (28) y porque el contrapeso (28) tiene forma esencialmente paralelepípeda.
9. Máquina según la reivindicación 8, caracterizada porque el contrapeso (28) tiene tres primeras ruedas (33) no alineadas a su primera cara (38) perpendiculares al primer eje (X) y una segunda rueda (34) en su segunda cara (40) opuesta a dicha primera cara (38).
10. Máquina según la reivindicación 8 ó 9, caracterizada porque el contrapeso (28) tiene dos primeras ruedas (33) en su tercera cara (48) perpendiculares al tercer eje (Y) y una segunda rueda (34) en su cuarta cara (49) opuesta a dicha tercera cara (48).
11. Máquina según cualquiera de las reivindicaciones precedentes, caracterizada porque dichas ruedas (33, 34) están hechas de o recubiertas de material elastomérico.
12. Máquina según cualquiera de las reivindicaciones precedentes, caracterizada porque las paredes laterales de dicho montante tienen un acabado irregular.
13. Máquina según cualquiera de las reivindicaciones precedentes, caracterizada porque dicho montante (17) tiene una estructura tubular definida por una sección en C (23) y por una placa (26) soldada a los laterales libres de dicha sección (23).
Patentes similares o relacionadas:
 Aparato y procedimiento de formación de imágenes intracraneales, del 30 de Octubre de 2019, de Archeoptix Biomedical Inc: Un aparato de formación de imágenes, que comprende:
una red de al menos tres transceptores electromagnéticos coplanarios que definen un plano de recepción;
al menos […]
Aparato y procedimiento de formación de imágenes intracraneales, del 30 de Octubre de 2019, de Archeoptix Biomedical Inc: Un aparato de formación de imágenes, que comprende:
una red de al menos tres transceptores electromagnéticos coplanarios que definen un plano de recepción;
al menos […]
Metrología de alta velocidad con máquinas numéricamente controladas, del 25 de Abril de 2018, de Grale Technologies: Un sistema que comprende: un dispositivo de metrología unido a un brazo de herramienta operativa y configurado para medición, para un ciclo de movimiento […]
 Método de calibración de un modelo matemático para una máquina de medición de coordenadas para la compensación de errores dinámicos debidos a la deformación, del 10 de Febrero de 2016, de HEXAGON METROLOGY S.P.A: 1. Un método de calibración de un modelo matemático de una máquina de medición para la compensación de errores debidos a deformación dinámica, que […]
Método de calibración de un modelo matemático para una máquina de medición de coordenadas para la compensación de errores dinámicos debidos a la deformación, del 10 de Febrero de 2016, de HEXAGON METROLOGY S.P.A: 1. Un método de calibración de un modelo matemático de una máquina de medición para la compensación de errores debidos a deformación dinámica, que […]
Máquina de medición de coordenadas, del 21 de Enero de 2015, de HEXAGON METROLOGY S.P.A: Una máquina de medición de coordenadas que comprende una base provista de primeros medios de guía a lo largo de un primer eje horizontal […]
 MÁQUINA DE CONTROL NUMÉRICO DESMONTABLE, del 17 de Diciembre de 2014, de UNIMETRIK, S.A: Máquina de control numérico desmontable que comprende una primera bancada longitudinal , una base , una columna solidariamente unida a la base , un carro […]
MÁQUINA DE CONTROL NUMÉRICO DESMONTABLE, del 17 de Diciembre de 2014, de UNIMETRIK, S.A: Máquina de control numérico desmontable que comprende una primera bancada longitudinal , una base , una columna solidariamente unida a la base , un carro […]
 MÁQUINA DE CONTROL NUMÉRICO DESMONTABLE, del 20 de Noviembre de 2014, de UNIMETRIK, S.A: Máquina de control numérico desmontable que comprende una primera bancada longitudinal , una base , una columna solidariamente unida a la base , un […]
MÁQUINA DE CONTROL NUMÉRICO DESMONTABLE, del 20 de Noviembre de 2014, de UNIMETRIK, S.A: Máquina de control numérico desmontable que comprende una primera bancada longitudinal , una base , una columna solidariamente unida a la base , un […]
 MÉTODO Y PATRÓN DE CARACTERÍSTICAS GEOMÉTRICAS PARA CALIBRACIÓN Y VERIFICACIÓN DE LA MEDICIÓN CON BRAZOS ARTICULADOS DE MEDIR POR COORDENADAS, del 12 de Septiembre de 2014, de UNIVERSIDAD DE OVIEDO: Método y patrón de características geométricas para la verificación y calibración de la medición con brazos articulados de medir por coordenadas, que comprende […]
MÉTODO Y PATRÓN DE CARACTERÍSTICAS GEOMÉTRICAS PARA CALIBRACIÓN Y VERIFICACIÓN DE LA MEDICIÓN CON BRAZOS ARTICULADOS DE MEDIR POR COORDENADAS, del 12 de Septiembre de 2014, de UNIVERSIDAD DE OVIEDO: Método y patrón de características geométricas para la verificación y calibración de la medición con brazos articulados de medir por coordenadas, que comprende […]
 Método y patrón de características geométricas para calibración y verificación de la medición con brazos articulados de medir por coordenadas, del 4 de Septiembre de 2014, de UNIVERSIDAD DE OVIEDO: Método y patrón de características geométricas para la verificación y calibración de la medición con brazos articulados de medir por coordenadas, que comprende esferas macizas, […]
Método y patrón de características geométricas para calibración y verificación de la medición con brazos articulados de medir por coordenadas, del 4 de Septiembre de 2014, de UNIVERSIDAD DE OVIEDO: Método y patrón de características geométricas para la verificación y calibración de la medición con brazos articulados de medir por coordenadas, que comprende esferas macizas, […]