MANIPULADOR DE GRAN CAPACIDAD.
Manipulador de gran capacidad, en particular una autobomba de hormigón,
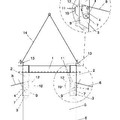
compuesto de un caballete de soporte de poste (16) dispuesto sobre un bastidor, en particular sobre un chasis (10), giratorio por medio de al menos un equipo motriz sobre un eje de rotación esencialmente vertical (18), de una pluma flexible (20) compuesto de como mínimo dos brazos de pluma (1, 2, 3, 4, 5), cada uno pivotante de manera limitada respecto del caballete de soporte de pluma (16) o un brazo de pluma adyacente sobre respectivos ejes de articulación horizontales paralelos el uno con el otro, de un elemento pendulante (50) colgante hacia abajo de la punta de pluma (55), de un elemento de ajuste (52, 54) dispuesto en un dispositivo de control y de un sensor de coordenadas asistido por ordenador que responde a señales de salida del elemento de ajuste (52, 54) y activa los equipos motrices de los ejes de articulación y de rotación de la pluma flexible (20) de acuerdo con el recorrido de ajuste indicado por medio del elemento de ajuste, respecto de la posición actual de la punta de pluma (55), pudiendo la punta de pluma (55) seguir los movimientos espaciales del elemento pendulante (50) y presentando el elemento de ajuste al menos un sensor de inclinación dispuesto de manera desconectable en una carcasa (30) fija al elemento pendulante (50), caracterizado porque en la carcasa (30) se encuentran dispuestos dos sensores de inclinación (52, 54) angulados mutuamente en un ángulo de 90º sobre un eje paralelo al eje longitudinal (32) del elemento pendulante (50), y porque la carcasa (30) presenta una marcación (47) que indica la orientación de al menos uno de los sensores de inclinación (54) dentro de la carcasa (30)
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2008/050715.
Solicitante: Putzmeister Engineering GmbH.
Nacionalidad solicitante: Alemania.
Dirección: Max-Eyth-Strasse 10 72631 Aichtal ALEMANIA.
Inventor/es: RAU, KURT.
Fecha de Publicación: .
Fecha Solicitud PCT: 22 de Enero de 2008.
Clasificación Internacional de Patentes:
- B66C1/44 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B66 ELEVACION; LEVANTAMIENTO; REMOLCADO. › B66C GRUAS Y PUENTES-GRUA; ELEMENTOS O DISPOSITIVOS DE TOMA DE CARGA PARA GRUAS, PUENTES GRUA, CABRESTANTES, CABRIAS O POLIPASTOS (mecanismos de enroscadura de cuerda, de cable o de cadena, dispositivos de frenado o de parada de su uso B66D; adaptados especialmente para los reactores nucleares G21). › B66C 1/00 Elementos o dispositivos de toma de carga fijados a los mecanismos de subida, bajada o arrastre de las grúas o adaptados para ser utilizados con estos mecanismos y transmitir los esfuerzos a los objetos o grupos de objetos (medios para unir cables o cuerdas F16G 11/00). › y aplicándoles fuerzas de fricción.
- B66C13/06B
- B66C13/08 B66C […] › B66C 13/00 Otras características de estructura o detalles. › para depositar las cargas según una orientación o en una posición dadas.
- B66C13/40 B66C 13/00 […] › Utilización de dispositivos para transmitir impulsos de control; Utilización de dispositivos de control a distancia (controles en general G05).
- B66C13/44 B66C 13/00 […] › Transmisores eléctricos.
- B66C13/46 B66C 13/00 […] › Indicadores de posición para cargas suspendidas o para elementos de grúas.
- E04G21/04 CONSTRUCCIONES FIJAS. › E04 EDIFICIOS. › E04G ANDAMIAJES; MOLDES; ENCOFRADOS; HERRAMIENTAS O ACCESORIOS PARA LA CONSTRUCCION, O SU EMPLEO; MANIPULACIÓN DE LOS MATERIALES DE CONSTRUCCION EN LA PROPIA OBRA; REPARACION, DEMOLICION U OTROS TRABAJOS EN EDIFICIOS CONSTRUIDOS. › E04G 21/00 Preparación, transporte o trabajo de los materiales o de elementos de construcción in situ ; Otros dispositivos o medidas concernientes a los trabajos de construcción (trabajo de los materiales análogos a la piedra B28D; transporte en general B65G; aparatos de elevación B66; instrumentos de medida G01). › Dispositivos para transportar y distribuir simultáneamente (bombas para hormigón F04).
Clasificación PCT:
- B66C23/00 B66C […] › Grúas que constan esencialmente de una viga, aguilón o una estructura triangular que actúan como brazo de palanca, montadas de forma que permitan movimientos de traslación o de orientación en planos verticales u horizontales, o bien una combinación de esos movimientos, p. ej. grúas de aguilón, derricks o grúas sobre torres (estructuras de torres que soportan la base B66C 5/00; adaptaciones de armazones que soportan las vías de rodadura B66C 6/00).
- E04G21/04 E04G 21/00 […] › Dispositivos para transportar y distribuir simultáneamente (bombas para hormigón F04).
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia.
PDF original: ES-2364940_T3.pdf
Fragmento de la descripción:
La invención se refiere a un manipulador de gran capacidad, en particular una autobomba de hormigón, compuesto de un caballete de soporte de pluma dispuesto sobre un bastidor, en particular sobre un chasis, giratorio por medio de un equipo motriz sobre un eje de rotación esencialmente vertical, de una pluma flexible compuesto de como mínimo dos brazos de pluma, cada uno pivotante de manera limitada respecto del caballete de soporte de pluma o un brazo de pluma adyacente sobre respectivos ejes de articulación horizontales paralelos el uno con el otro, por medio de un equipo motriz adicional, de un elemento pivotante colgante hacia abajo de una punta de pluma del último brazo de pluma y de un elemento de ajuste dispuesto en un dispositivo de control y de un sensor de coordenadas asistido por ordenador que responde a señales de salida del elemento de ajuste y activa los equipos motrices de los ejes de articulación y de rotación de acuerdo con el recorrido de ajuste indicado por medio del elemento de ajuste, respecto de la posición actual de la punta de pluma, pudiendo la punta de pluma seguir los movimientos espaciales del elemento de ajuste.
Por manipuladores de gran capacidad de este tipo se entienden autobombas de hormigón, bombas mezcladoras, robots proyectores de hormigón o similares que, mediante un apoyo apropiado, pueden usarse con un intervalo completo de pivotado de 360º del caballete de soporte de pluma, aun en posición extendida horizontal de la pluma flexible. El operador es responsable del control del manipulador de gran capacidad y del posicionamiento del elemento pendulante configurado, preferentemente, como manguera final y dispuesto en el último brazo de la pluma flexible.
En un manipulador de gran capacidad configurado como autobomba de hormigón con un dispositivo de control remoto ya se sabe (EP-0 715 673 B2) que el operador guía manualmente el elemento pendulante configurado como manguera final al lugar de aplicación del hormigón y que la punta del pluma le sigue automáticamente hasta allí. Con este propósito, se ha previsto una línea de transmisión de señales mediante la que la punta de pluma puede ser movida por el operador con asistencia de un ordenador, por medio de un recorrido de ajuste predeterminado por la manguera final. El elemento de ajuste está configurado como sensor de inclinación sensible a la dirección dispuesto en la manguera final de modo desconectable y/o ajustable en altura. La sensibilidad a la dirección del sensor de inclinación se implementa allí por medio del uso de un sensor de inclinación de dos ejes. El sensor de inclinación presenta un sistema electrónico de evaluación para la indicación de una señal de recorrido de ajuste dependiente de la dirección de inclinación medida y, para el movimiento de la punta de pluma, una señal de velocidad dependiente del ángulo de inclinación medido. El sensor de inclinación se encuentra en una carcasa fija a la manguera final de modo antitorsional respecto de la punta de pluma. Debido a dichas medidas es posible, al desviar la manguera final, mover la punta de pluma en una dirección correspondiente a la dirección de desviación, a una velocidad en función del ángulo de desviación o del ángulo de inclinación.
Partiendo de ello, la invención tiene el objetivo de perfeccionar un manipulador de gran capacidad con su dispositivo de control fijado al elemento pendulante al efecto de que el posicionamiento del dispositivo de control en el elemento pendulante sea facilitado y simplificado.
Para conseguir dicho objetivo se proponen las combinaciones de características indicadas en las reivindicaciones 1 y 13. De las reivindicaciones secundarias resultan configuraciones y perfeccionamientos ventajosos de la invención.
Una configuración ventajosa de la invención prevé que la pluma flexible del manipulador de gran capacidad configurado como autobomba de hormigón está configurada como distribuidora de hormigón, y que a través de los brazos se conduce un conducto de transporte de hormigón que en su extremo desemboca en una manguera final que cuelga hacia debajo de la punta de pluma y que forma el elemento pendulante.
Según la invención, dos sensores de inclinación angulados uno respecto del otro en un ángulo de 90º sobre un eje paralelo al eje del elemento pendulante están dispuestos en el interior de la carcasa, presentando la carcasa, además, una marcación que indica la orientación de al menos uno de los sensores de inclinación dentro de la carcasa. Ventajosamente, los sensores de inclinación están dispuestos en dos partes de alojamiento, angulados uno respecto del otro en 90º, de una placa de soporte insertada en el interior de la carcasa, presentando la placa de soporte una parte de alojamiento adicional que aloja el sistema electrónico correspondiente. En esto, el sistema electrónico está conectado a las salidas de los sensores de inclinación y sirve, ante todo, para el procesamiento de señales y su transmisión al sensor de coordenadas del ordenador de a bordo.
Otra configuración preferente de la invención prevé que la placa de soporte rígida con sus piezas situadas sobre las partes de alojamiento esté insertada, ocupando poco espacio, en la carcasa hecha de un material elastómero. En los extremos de la carcasa opuestos mutuamente se encuentran, preferentemente, dispuestas o moldeadas correas con las que la carcasa puede fijarse a la manguera final de forma torsionalmente rígida o antidesplazante, a la manera de un cinto de sensores. La marcación de acuerdo con la invención está configurada, preferentemente, como una marcación de barras dispuesta en la superficie de la carcasa y orientada en el sentido de extensión de la pluma flexible. Con ello se asegura que ambos sensores de inclinación sean sensibles al sentido, o sea que reaccionan a desviaciones del elemento pendulante tanto en el sentido de extensión como también lateral al mismo y, por eso, junto con el sistema electrónico de evaluación respectivo son apropiados para la emisión de una señal de recorrido de ajuste. Además, en función del ángulo de inclinación medido puede generarse una señal de velocidad para el movimiento de la punta de pluma.
Por motivos de la seguridad operacional, los equipos motrices de la pluma flexible y del caballete de soporte de pluma son controlados en combinación, apropiadamente, mediante el sensor de coordenadas, manteniendo la altura de la punta de pluma en un plano horizontal especificado. Con ello se consigue que la punta de pluma siga al elemento de ajuste en el elemento pendulante de una manera en que siempre permanece a una determinada altura sobre el suelo. Además se asegura que el seguimiento de la punta de pluma sólo tiene lugar cuando se produce una desviación mínima especificada del elemento pendulante de, por ejemplo, ± 50 cm. Adicionalmente, un elemento de ajuste de altura accionado manualmente puede estar dispuesto en el cinto de sensores para el ajuste de altura.
Según otra configuración preferente de la invención, en la que se ha previsto una unidad de ajuste adicional para el accionamiento de un regulador de caudal de una bomba de hormigón, el elemento de ajuste adicional se encuentra situado en la carcasa fija a la manguera final, y está conectado con la bomba de hormigón mediante una línea de señales, comunicando sin contacto, ventajosamente, del lado de entrada con un elemento de accionamiento externo. Con dicha medida se consigue que sea posible un accionamiento del regulador de caudal por parte del operador, sin que este deba separar sus manos de la manguera final. De manera ventajosa, el elemento de ajuste presenta para este propósito dos entradas de ajuste correspondientes a un incremento o reducción de caudal, activables sin contacto por medio de una línea inalámbrica. En ello, la línea inalámbrica presenta, apropiadamente, un transpondedor RFID (RFID = Radio Frequency Identification = identificación por radiofrecuencia) como elemento de activación y una lectora RFID fijado a la manguera final, transmitiendo en cada proceso de emisión el al menos un transpondedor RFID un paquete de identificación y datos básicos al control remoto a través de la lectora RFID. De este modo se asegura que sólo un operador autorizado que posee un transpondedor RFID (etiqueta RFID) pueda activar la bomba de hormigón mediante el control remoto. Apropiadamente, cada entrada de ajuste tiene asignada una lectora RFID propia, mientras que el al menos un transpondedor RFID puede estar integrado a un guante de trabajo.
Una configuración adicional preferente de la invención prevé un equipo inalámbrico de control remoto adicional, que... [Seguir leyendo]
Reivindicaciones:
1. Manipulador de gran capacidad, en particular una autobomba de hormigón, compuesto de un caballete de soporte de poste (16) dispuesto sobre un bastidor, en particular sobre un chasis (10), giratorio por medio de al menos un equipo motriz sobre un eje de rotación esencialmente vertical (18), de una pluma flexible (20) compuesto de como mínimo dos brazos de pluma (1, 2, 3, 4, 5), cada uno pivotante de manera limitada respecto del caballete de soporte de pluma (16) o un brazo de pluma adyacente sobre respectivos ejes de articulación horizontales paralelos el uno con el otro, de un elemento pendulante (50) colgante hacia abajo de la punta de pluma (55), de un elemento de ajuste (52, 54) dispuesto en un dispositivo de control y de un sensor de coordenadas asistido por ordenador que responde a señales de salida del elemento de ajuste (52, 54) y activa los equipos motrices de los ejes de articulación y de rotación de la pluma flexible (20) de acuerdo con el recorrido de ajuste indicado por medio del elemento de ajuste, respecto de la posición actual de la punta de pluma (55), pudiendo la punta de pluma (55) seguir los movimientos espaciales del elemento pendulante (50) y presentando el elemento de ajuste al menos un sensor de inclinación dispuesto de manera desconectable en una carcasa (30) fija al elemento pendulante (50), caracterizado porque en la carcasa (30) se encuentran dispuestos dos sensores de inclinación (52, 54) angulados mutuamente en un ángulo de 90º sobre un eje paralelo al eje longitudinal (32) del elemento pendulante (50), y porque la carcasa (30) presenta una marcación (47) que indica la orientación de al menos uno de los sensores de inclinación (54) dentro de la carcasa (30).
2. Manipulador de gran capacidad según la reivindicación 1, caracterizado porque la pluma flexible (20) está configurada como pluma distribuidora de hormigón, y porque a través de los brazos de pluma (1, 2, 3, 4, 5) se conduce un conducto de transporte de hormigón que en su extremo desemboca en una manguera final que cuelga hacia abajo de la punta de pluma (55) y que forma el elemento pendulante (50).
3. Manipulador de gran capacidad según la reivindicación 1 o 2, caracterizado porque los sensores de inclinación (52, 54) están dispuestos, angulados mutuamente en 90º, en dos partes de alojamiento (34, 36) de una placa de soporte (38) insertada en el interior de la carcasa (30).
4. Manipulador de gran capacidad según la reivindicación 3, caracterizado porque la placa de soporte rígida (38,) con sus partes que se encuentran en las partes de alojamiento (34, 36, 42), está insertada en la carcasa (30) conformada de un material elastómero.
5. Manipulador de gran capacidad según una de las reivindicaciones 1 a 3, caracterizado porque en dos extremos de la carcasa (30) opuestos mutuamente se encuentran dispuestas o moldeadas correas (46) con las que la carcasa
(30) está fijada al elemento pendulante (50) a la manera de un cinto de sensores, de forma torsionalmente rígida y antidesplazante.
6. Manipulador de gran capacidad según una de las reivindicaciones 1 a 5, caracterizado porque la marcación (47) está configurada como una marcación de barras dispuesta en la superficie de la carcasa y orientada en el sentido de extensión de la pluma flexible (20).
7. Manipulador de gran capacidad según una de las reivindicaciones 1 a 6 con un regulador de caudal para la bomba de hormigón activable por medio de al menos un elemento de ajuste (60+, 60-) adicional, caracterizado porque el elemento de ajuste (60+, 60-) adicional está dispuesto en la carcasa (30) fija al elemento pendulante o al cinto de sensores y conectado con la bomba de hormigón mediante una línea de señales y, del lado de entrada, comunicada sin contacto con un elemento de accionamiento (62, 64) externo.
8. Manipulador de gran capacidad según la reivindicación 7, caracterizado porque el elemento de ajuste (60+, 60-) adicional presenta al menos dos entradas de ajuste correspondientes a un incremento o reducción de caudal, accionables sin contacto por medio de una línea inalámbrica.
9. Manipulador de gran capacidad según la reivindicación 8, caracterizado porque la línea inalámbrica comprende al menos un transpondedor RFID (62, 64) como elemento de activación y una lectora RFID (44) fija al elemento pendulante o a la manguera final.
10. Manipulador de gran capacidad según una de las reivindicaciones 7 a 9, caracterizado por un equipo inalámbrico de control remoto (80) compuesto de múltiples unidades de control comunicadas con el accionamiento de la pluma y/o el accionamiento de la bomba mediante una línea inalámbrica, estando las unidades de control del equipo inalámbrico de control remoto y las unidades de ajuste en la carcasa (30) fija al elemento pendulante o cinto de sensores pueden ser activadas, opcionalmente, por medio de un elemento de control desde el equipo inalámbrico de control remoto.
11. Manipulador de gran capacidad según la reivindicación 10, caracterizado porque el equipo inalámbrico de control remoto (80) lleva un transpondedor RFID cuyo contenido es legible e identificable por medio de una lectora RFID
(44) dispuesta en la carcasa fija al elemento pendulante o cinto de sensores.
12. Manipulador de gran capacidad según la reivindicación 11, caracterizado porque en la carcasa fija al elemento pendulante o cinto de sensores está dispuesto un transpondedor RFID cuyo contenido es legible e identificable por medio de una lectora RFID dispuesta en el dispositivo de control remoto (80).
13. Dispositivo de control remoto para la fijación en la manguera final (50) de una bomba de hormigón, preferentemente móvil, que presenta una pluma distribuidora de hormigón (20), compuesta de una carcasa (30), al menos un elemento de ajuste, configurado como sensor de inclinación (52, 54), dispuesto en la carcasa, y un sistema electrónico de evaluación (40) que responde a señales de salida del elemento de ajuste, caracterizado porque dos sensores de inclinación (52, 54) angulados uno respecto del otro en un ángulo de 90º están dispuestos en el interior de la carcasa (30), y porque la carcasa lleva una marcación (47) que indica la orientación de al menos uno de los sensores de inclinación dentro de la carcasa.
14. Dispositivo de control remoto según la reivindicación 13, caracterizado porque los sensores de inclinación (52, 54) están dispuestos, angulados mutuamente en 90º, en dos partes de alojamiento (34, 36) de una placa de soporte
(38) insertada en el interior de la carcasa (30).
15. Dispositivo de control remoto según la reivindicación 14, caracterizado porque la placa de soporte (38) presenta una parte de alojamiento (42) adicional que soporta el sistema electrónico de evaluación (40), dispuesta, preferentemente, entre las partes de alojamiento (34, 36) que soportan los dos sensores de inclinación (52, 54) y angulados respecto de las mismas.
16. Dispositivo de control remoto según la reivindicación 13 o 14, caracterizado porque la placa de soporte rígida
(38) con sus partes (52, 54, 40) que se encuentran en las partes de alojamiento está insertada en la carcasa (30) conformada de un material elastómero.
17. Dispositivo de control remoto según una de las reivindicaciones 13 a 16, caracterizado porque en dos extremos de la carcasa (30) opuestos mutuamente se encuentran dispuestas o moldeadas correas (46) con las que la carcasa
(30) puede fijarse, a la manera de un cinto de sensores, a la manguera final (50) de forma torsionalmente rígida y antidesplazante.
18. Dispositivo de control remoto según una de las reivindicaciones 13 a 17, caracterizado porque la marcación (47) está configurada como una marcación de barras dispuesta en la superficie de la carcasa.
19. Dispositivo de control remoto según una de las reivindicaciones 13 a 18, caracterizado porque en la carcasa (30) está dispuesto un elemento de ajuste (60+, 60-) adicional que, del lado de entrada, comunica sin contacto con un elemento de accionamiento (64).
20. Dispositivo de control remoto según la reivindicación 19, caracterizado porque el elemento de ajuste (60+, 60-) adicional presenta al menos dos entradas de ajuste correspondientes a un incremento o reducción de caudal, activables sin contacto por medio de una línea inalámbrica.
Patentes similares o relacionadas:
APARATO ELEVADOR PARA ELEVAR VERTICALMENTE UN BIDÓN DE CARTÓN CORRUGADO OCTOGONAL, del 11 de Febrero de 2020, de TELESFORO GONZALEZ MAQUINARIA SLU: Aparato para elevar un bidón de cartón corrugado dotado de ocho caras delgadas y lisas separadas por unos pliegues paralelos a la dirección vertical […]
APARATO PARA ELEVAR VERTICALMENTE UN BIDÓN DE CARTÓN CORRUGADO PRISMÁTICO OCTOGONAL HUECO DOTADO DE OCHO CARAS LATERALES DELGADAS Y LISAS, del 13 de Enero de 2020, de TELESFORO GONZALEZ MAQUINARIA SLU: Aparato para elevar verticalmente un bidón de cartón corrugado prismático octogonal hueco dotado de un cuerpo de ocho caras delgadas […]
APARATO PARA ELEVAR VERTICALMENTE UN BIDÓN DE CARTÓN CORRUGADO PRISMÁTICO OCTOGONAL HUECO DOTADO DE OCHO CARAS LATERALES DELGADAS Y LISAS, del 13 de Enero de 2020, de TELESFORO GONZALEZ MAQUINARIA SLU: Aparato para elevar verticalmente un bidón de cartón corrugado prismático octogonal hueco dotado de un cuerpo de ocho caras delgadas […]
Dispositivo de sujeción para elevar rollos de material en bobina, en concreto, rollos de papel y cartón, del 27 de Mayo de 2019, de Raumaster Paper Oy: Dispositivo de sujeción para elevar verticalmente rollos de material en bobina, tales como rollos de papel o de cartón, el dispositivo de sujeción […]
Pinza de elevación, en particular para levantar elementos con porciones de vigas en "T", del 4 de Junio de 2014, de Fincantieri S.p.A: Pinza de elevación, en particular para levantar elementos con porciones de vigas en "T", comprendiendo un elemento de elevación, en el que se eleva la pinza , […]
Útil para izado y descenso de una pala de aerogenerador, del 19 de Marzo de 2014, de ACCIONA WINDPOWER, S.A.: Útil para el izado y el descenso de una pala de aerogenerador, que comprende: - una estructura articulada, compuesta de una […]
 PINZA DE MANIPULACIÓN Y TRANSPORTE, del 18 de Diciembre de 2012, de RUBRICA INGENIERIA Y ARQUITECTURA, S.L: Pinza de manipulación y transporte.
Está destinada para manipular bloques de elevado peso en suspensión sujetándolos por dos de sus caras laterales opuestas.
Se caracteriza […]
PINZA DE MANIPULACIÓN Y TRANSPORTE, del 18 de Diciembre de 2012, de RUBRICA INGENIERIA Y ARQUITECTURA, S.L: Pinza de manipulación y transporte.
Está destinada para manipular bloques de elevado peso en suspensión sujetándolos por dos de sus caras laterales opuestas.
Se caracteriza […]
 DISPOSITIVO DE SEGURIDAD PARA UN DISPOSITIVO DE AGARRE O APREHENSION PARA ELEVAR ALGUNOS ELEMENTOS DE ALBAÑILERIA O MAMPOSTERIA, del 1 de Junio de 2010, de VAN DIETEN, ALBERTUS JACOBUS GERTRUDE MARIA: Un dispositivo de seguridad móvil verticalmente para un aparato de aprehensión que comprende un bastidor de construcción de tijera provisto con una unión de pivotamiento […]
DISPOSITIVO DE SEGURIDAD PARA UN DISPOSITIVO DE AGARRE O APREHENSION PARA ELEVAR ALGUNOS ELEMENTOS DE ALBAÑILERIA O MAMPOSTERIA, del 1 de Junio de 2010, de VAN DIETEN, ALBERTUS JACOBUS GERTRUDE MARIA: Un dispositivo de seguridad móvil verticalmente para un aparato de aprehensión que comprende un bastidor de construcción de tijera provisto con una unión de pivotamiento […]