PROCEDIMIENTO DE ESTIMACIÓN DE LA VELOCIDAD LONGITUDINAL DE UN VEHÍCULO, DISPOSITIVO PARA SU PUESTA EN PRÁCTICA.
Procedimiento de estimación de una velocidad de desplazamiento longitudinal de un vehículo automóvil con la ayuda de al menos un calculador embarcado en el vehículo,
que comprende una etapa de medición, por al menos un sensor, de la velocidad (Wij) de rotación de cada rueda (ij) del vehículo, caracterizado porque comprende, además, las etapas siguientes: - obtención para cada rueda de un indicador (dij) de deslizamiento de rueda, apto para tomar un primer estado (dij=1) de deslizamiento de la rueda y un segundo estado (dij=0) de ausencia de deslizamiento de la rueda, - cálculo de la velocidad (Vest) de desplazamiento longitudinal del vehículo, a partir de las velocidades (Wij) de rotación de ruedas medidas para las cuales el indicador (dij) de deslizamiento de rueda está en un segundo estado (dij=0) de ausencia de deslizamiento de la rueda, sin tener en cuenta las velocidades (Wij) de rotación de ruedas medidas para las cuales el indicador (dij) de deslizamiento de rueda está en el primer estado (dij=1) de deslizamiento
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/FR2008/051370.
Dirección: 13-15 QUAI LE GALLO 92100 BOULOGNE-BILLANCOURT FRANCIA.
Inventor/es: CLAEYS,Xavier, MARSILIA,Marco.
Fecha de Publicación: .
Fecha Solicitud PCT: 21 de Julio de 2008.
Clasificación Internacional de Patentes:
B60W40/10D
Clasificación PCT:
B60W40/10TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60VEHICULOS EN GENERAL. › B60WCONTROL CONJUGADO DE VARIAS SUBUNIDADES DE UN VEHICULO DE DIFERENTE TIPO O FUNCION; SISTEMAS DE CONTROL ESPECIALMENTE ADAPTADOS PARA VEHICULOS HIBRIDOS; SISTEMAS DE CONTROL DE LA CONDUCCION DE VEHICULOS TERRESTRES NO RELACIONADOS CON EL CONTROL DE UNA SUBUNIDAD PARTICULAR. › B60W 40/00 Cálculo o estimación de los parámetros de funcionamiento para el sistema de ayuda a la conducción de vehículos terrestres que no están relacionados con el control de una subunidad particular. › relacionados con el movimiento del vehículo.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Procedimiento de estimación de la velocidad longitudinal de un vehículo, dispositivo para su puesta en práctica. La invención concierne a un procedimiento de estimación de una velocidad de desplazamiento longitudinal de un vehículo automóvil rodante. Un ámbito de aplicación de la invención es el de los vehículos automóviles de carretera sobre ruedas, en los cuales este procedimiento es puesto en práctica por un calculador embarcado. El objetivo es mejorar el comportamiento del vehículo y por consiguiente la seguridad del conductor. El vehículo está equipado con sensores de velocidad de rotación de las ruedas. Esta información es utilizada, entro otros, por sistemas activos de seguridad (ABS, control de tracción), así como en las estrategias de antipatinaje. El procedimiento debe poder ser adaptado a varios tipos de vehículos de carretera, como por ejemplo los vehículos de tracción, los vehículos de propulsión, los vehículos 4x4 y los vehículos híbridos. La problemática de estimación de la velocidad longitudinal de un vehículo (velocidad de referencia) ha sido estudiada ya ampliamente en el mundo automóvil. El documento US-A-5 579 230 propone un procedimiento de estimación de la velocidad de un vehículo, basado en sensores de velocidad en las ruedas no motrices, un acelerómetro y un sensor de frenado. Cuando el sensor de frenado no indica ninguna acción de freno, la velocidad del vehículo es determinada a partir de las velocidades de las ruedas, mientras que cuando el sensor de frenado indica una acción de frenado, la velocidad del vehículo es estimada por integración de la aceleración del acelerómetro. El documento PUSCA R T OTROS: Fuzzy logic based control for electric vehicle with four separate traction drives VTC SPRING 2002. IEEE 55TH. VEHICULAR TECHNOLOGY CONFERENCE. PROCEEDINGS. BIRMINGHAM, AL, MAY 6 - 9, 2002, IEEE VEHICULAR TECHONOLOGY CONFERECE NEW YORK, NY: IEEE, US, VOL 1 OF 4. CONF. 55, 6 mayo 2002 (2002-05-06), paginas 2089-2096, XP010622184 ISBN: 0-7803-7484-3 describe obtener la velocidad de un vehículo a partir de las velocidades de rotación de las ruedas medidas teniendo en cuenta el deslizamiento de estas ruedas, véase en particular la página 2092. En este documento, la velocidad de rotación de cada rueda recibe un coeficiente (k) que se basa en el deslizamiento. No se ha divulgado calcular la velocidad del vehículo solamente sobre la base de las ruedas cuyo deslizamiento esté por debajo de un cierto umbral. El documento US 2006/282207 A, apartado 16, divulga una consideración de las ruedas que están en cantidad con el suelo y tienen un par pequeño. Un deslizamiento de estas ruedas no es probable. Asimismo, este documento no divulga considerar el deslizamiento de cada rueda. La invención pretende obtener un procedimiento de estimación de la velocidad longitudinal de un vehículo automóvil que no necesite acelerómetro longitudinal y consiga estimar de manera óptima esta velocidad longitudinal a partir de las velocidades de rotación de las ruedas del vehículo. A tal efecto, un primer objeto de la invención es un procedimiento de estimación de una velocidad de desplazamiento longitudinal de un vehículo automóvil con la ayuda de al menos un calculador embarcado en el vehículo, que comprende una etapa de medición, por al menos un sensor, de la velocidad de rotación de cada rueda del vehículo, Caracterizado porque comprende, además, las etapas siguientes: - obtención para cada rueda de un indicador de deslizamiento de rueda, apto para tomar un primer estado de deslizamiento de la rueda y un segundo estado de ausencia de deslizamiento de la rueda, - cálculo de la velocidad de desplazamiento longitudinal del vehículo, a partir de las velocidades de rotación de ruedas medidas para las cuales el indicador de deslizamiento de rueda está en un segundo estado de ausencia de deslizamiento de la rueda, sin tener en cuenta las velocidades de rotación de rueda medidas para las cuales el indicador de deslizamiento de rueda está en el primer estado de deslizamiento. De acuerdo con características de la invención, se obtiene un valor de par del motor o de los motores en las ruedas delanteras y/o traseras, se define una pluralidad de modos de cálculo de la velocidad de desplazamiento longitudinal del vehículo: - un primer modo de cálculo, cuando, a la vez, el par en las ruedas delanteras es inferior a un primer umbral positivo prescrito y superior a un segundo umbral negativo prescrito, el par en las ruedas traseras es superior a un tercer umbral positivo prescrito o inferior a un cuarto umbral negativo prescrito, - un segundo modo de cálculo, cuando a la vez el par en las ruedas traseras es inferior a un quinto umbral positivo prescrito y superior a un sexto umbral negativo prescrito, el par en las ruedas delanteras es superior a un séptimo umbral positivo prescrito o inferior a un octavo umbral negativo prescrito, 2 - un tercer modo de cálculo, cundo no se cumplen las condiciones correspondientes a los primero y segundo modos de cálculo. De acuerdo con características de la invención, - en el primer modo de cálculo, la velocidad de desplazamiento longitudinal del vehículo se calcula: a partir de la velocidad de rotación de las ruedas delanteras, cuyo indicador de deslizamiento se encuentra en el segundo estado de ausencia de deslizamiento, o si todas las ruedas delanteras tienen cada una su indicador de deslizamiento encontrándose en el primer estado de deslizamiento, a partir de la velocidad de rotación de las ruedas traseras que se encuentran en el segundo estado de ausencia de deslizamiento, - en el segundo modo de cálculo, la velocidad de desplazamiento longitudinal del vehículo se calcula: a partir de la velocidad de rotación de las ruedas traseras, cuyo indicador de deslizamiento se encuentra en el segundo estado de ausencia de deslizamiento, o si todas las ruedas traseras tienen cada una su indicador de deslizamiento encontrándose en el primer estado de deslizamiento, a partir de la velocidad de rotación de las ruedas delanteras que se encuentran en el segundo estado de ausencia de deslizamiento, - en el tercer modo de cálculo, la velocidad de desplazamiento longitudinal del vehículo se calcula a partir de la velocidad de rotación de las ruedas traseras y de las ruedas delanteras que se encuentran en el segundo estado de ausencia de deslizamiento. De acuerdo con otras características de la invención: - se obtiene a partir de al menos un órgano de accionamiento de frenado por el conductor una primera señal de indicación de frenado, apta para encontrarse en un primer estado de frenado o en un segundo estado de ausencia de frenado, y para cumplir las condiciones de los primero y segundo modos de cálculo la primera señal de indicación de frenado del conductor debe encontrarse además en el segundo estado de ausencia de frenado. De acuerdo con otras características de la invención: se obtiene a partir de un sistema de regulación de frenado en las ruedas delanteras y en las ruedas traseras al menos una segunda señal de indicación de frenado en las ruedas delanteras, apta para encontrarse en un primer estado de frenado o en un segundo estado de ausencia de frenado, y al menos una tercera señal de indicación de frenado en las ruedas traseras, apta para encontrarse en un primer estado de frenado o en un segundo estado de ausencia de frenado, - para cumplir las condiciones del primer modo de cálculo, a la vez el par en las ruedas delanteras es inferior a un primer umbral positivo prescrito y superior a un segundo umbral negativo prescrito, la segunda señal de indicación de frenado en las ruedas delanteras se encuentra en el segundo estado de ausencia de frenado, el par en las ruedas traseras es superior a un tercer umbral positivo prescrito o inferior a un cuarto umbral negativo prescrito, o la tercera señal de indicación de frenado en las ruedas traseras se encuentra en el primer estado de frenado, - para cumplir las condiciones del segundo modo de cálculo, a la vez el par en las ruedas traseras es inferior o igual a un quinto umbral positivo prescrito y superior a un sexto umbral negativo prescrito, la tercera señal de indicación de frenado en las ruedas traseras se encuentra en el segundo estado de ausencia de frenado, el par en las ruedas delanteras es superior a un séptimo umbral positivo prescrito o inferior a un octavo umbral negativo prescrito, o la segunda señal de indicación de frenado en las ruedas delanteras se encuentra en el primer estado de frenado, De acuerdo con otras características de la invención: - Los umbrales se fijan de manera proporcional a una repartición de peso predeterminada del vehículo en al menos un eje delantero que soporta las ruedas delanteras y en al menos un eje trasero que soporta las ruedas traseras. - Se hace la media aritmética de las velocidades de rotación... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento de estimación de una velocidad de desplazamiento longitudinal de un vehículo automóvil con la ayuda de al menos un calculador embarcado en el vehículo, que comprende una etapa de medición, por al menos un sensor, de la velocidad (Wij) de rotación de cada rueda (ij) del vehículo, caracterizado porque comprende, además, las etapas siguientes: - obtención para cada rueda de un indicador (dij) de deslizamiento de rueda, apto para tomar un primer estado (dij=1) de deslizamiento de la rueda y un segundo estado (dij=0) de ausencia de deslizamiento de la rueda, - cálculo de la velocidad (Vest) de desplazamiento longitudinal del vehículo, a partir de las velocidades (Wij) de rotación de ruedas medidas para las cuales el indicador (dij) de deslizamiento de rueda está en un segundo estado (dij=0) de ausencia de deslizamiento de la rueda, sin tener en cuenta las velocidades (Wij) de rotación de ruedas medidas para las cuales el indicador (dij) de deslizamiento de rueda está en el primer estado (dij=1) de deslizamiento. 2. Procedimiento de acuerdo con la reivindicación 1, caracterizado porque se obtiene un valor de par (Cmi) del motor o de los motores en las ruedas delanteras y/o traseras, se define una pluralidad de modos (MOD) de cálculo de la velocidad (Vest) de desplazamiento longitudinal del vehículo: - un primer modo de cálculo (MOD=2), cuando, a la vez, el par en las ruedas delanteras es inferior a un primer umbral positivo prescrito y superior a un segundo umbral negativo prescrito, el par en las ruedas traseras es superior a un tercer umbral positivo prescrito o inferior a un cuarto umbral negativo prescrito, - un segundo modo de cálculo (MOD=3), cuando a la vez el par en las ruedas traseras es inferior a un quinto umbral positivo prescrito y superior a un sexto umbral negativo prescrito, el par en las ruedas delanteras es superior a un séptimo umbral positivo prescrito o inferior a un octavo umbral negativo prescrito, - un tercer modo de cálculo (MOD=1), cuando no se cumplen las condiciones correspondientes a los primero y segundo modos de cálculo. 3. Procedimiento de acuerdo con la reivindicación 2, caracterizado porque - en el primer modo de cálculo (MOD=2), la velocidad (Vest) de desplazamiento longitudinal del vehículo se calcula: a partir de la velocidad de rotación de las ruedas delanteras, cuyo indicador (dij) de deslizamiento se encuentra en el segundo estado (dij=0) de ausencia de deslizamiento o si todas las ruedas delanteras tienen cada una su indicador de deslizamiento encontrándose en el primer estado de deslizamiento, a partir de la velocidad de rotación de las ruedas traseras que se encuentran en el segundo estado (dij=0) de ausencia de deslizamiento, - en el segundo modo de cálculo (MOD=3), se calcula la velocidad (Vest) de desplazamiento longitudinal del vehículo: a partir de la velocidad de rotación de las ruedas traseras, cuyo indicador (dij) de deslizamiento se encuentra en el segundo estado (dij=0) de ausencia de deslizamiento, o si todas las ruedas traseras tienen cada una su indicador de deslizamiento encontrándose en el primer estado de deslizamiento, a partir de la velocidad de rotación de las ruedas delanteras que se encuentran en el segundo estado (dij=0) de ausencia de deslizamiento, - en el tercer modo de cálculo (MOD=1), la velocidad (Vest) de desplazamiento longitudinal del vehículo se calcula a partir de la velocidad de rotación de las ruedas traseras y de las ruedas delanteras que se encuentran en el segundo estado (dij=0) de ausencia de deslizamiento. 4. Procedimiento de acuerdo con la reivindicación 3, caracterizado porque se obtiene a partir de al menos un órgano de accionamiento de frenado por el conductor una primera señal (Sl) de indicación de frenado, apta para encontrarse en un primer estado de frenado o en un segundo estado de ausencia de frenado, y para cumplir las condiciones de los primero y segundo modos de cálculo la primera señal (Sl) de indicación de frenado del conductor debe encontrarse además en el segundo estado de ausencia de frenado. 17 5. Procedimiento de acuerdo con una cualquiera de las reivindicaciones 2 a 4, caracterizado porque se obtiene a partir de un sistema de regulación de frenado en las ruedas delanteras y en las ruedas traseras al menos una segunda señal (Sl2) de indicación de frenado en las ruedas delanteras, apta para encontrarse en un primer estado de frenado o en un segundo estado de ausencia de frenado, y al menos una tercera señal (Sl3) de indicación de frenado en las ruedas traseras, apta para encontrarse en un primer estado de frenado o en un segundo estado de ausencia de frenado, - para cumplir las condiciones del primer modo (MOD=2) de cálculo, a la vez el par en las ruedas delanteras es inferior a un primer umbral positivo prescrito y superior a un segundo umbral negativo prescrito, la segunda señal (Sl2) de indicación de frenado en las ruedas delanteras se encuentra en el segundo estado de ausencia de frenado, el par en las ruedas traseras es superior a un tercer umbral positivo prescrito o inferior a un cuarto umbral negativo prescri- to, o la tercera señal (Sl3) de indicación de frenado en las ruedas traseras se encuentra en el primer estado de frenado, - para cumplir las condiciones del segundo modo (MOD=3) de cálculo, a la vez el par en las ruedas traseras es inferior o igual a un quinto umbral positivo prescrito y superior a un sexto umbral negativo prescrito, la tercera señal (Sl3) de indicación de frenado en las ruedas traseras se encuentra en el segundo estado de ausencia de frenado, el par en las ruedas delanteras es superior a un séptimo umbral positivo prescrito o inferior a un octavo umbral negativo prescrito, o la segunda señal (Sl2) de indicación de frenado en las ruedas delanteras se encuentra en el primer estado de frenado. 6. Procedimiento de acuerdo con una cualquiera de las reivindicaciones 2 a 5, caracterizado porque los umbrales se fijan de manera proporcional a una repartición de peso predeterminada del vehículo en al menos un eje delantero que soporta las ruedas delanteras y en al menos un eje trasero que soporta las ruedas traseras. 7. Procedimiento de acuerdo con una cualquiera de las reivindicaciones 2 a 6, caracterizado porque se hace la media aritmética de las velocidades de rotación de rueda retenidas en los modos de cálculo, multiplicada por un radio prescrito de rueda, para calcular la velocidad (Vest) de desplazamiento longitudinal del vehículo. 8. Procedimiento de acuerdo con una cualquiera de las reivindicaciones precedentes, caracterizado porque habiéndose calculado la velocidad (Vest) de desplazamiento longitudinal del vehículo, ésta forma una primera señal (Vest) de velocidad estimada, se detecta (TR) una discontinuidad de los valores de la primera señal (Vest) de velocidad estimada, se produce una segunda señal (Vref) de velocidad longitudinal del vehículo a partir de la primera señal (Vest) de velocidad estimada, reemplazando la discontinuidad detectada por una señal (RP) de transición continua prescrita. 9. Procedimiento de acuerdo con la reivindicación 8, caracterizado porque se calcula la segunda señal (Vref) de velocidad longitudinal del vehículo en instantes sucesivos, se calcula un valor de la citada discontinuidad de los valores de la primera señal (Vest) de velocidad estimada, siendo este valor de la discontinuidad igual a la diferencia entre el valor (Vest) de la primera señal de velocidad estimada para el instante presente y el valor (Vref) de la segunda señal (Vref) de velocidad longitudinal para el instante precedente, siendo determinada la señal (RP) de transición en función del valor de la discontinuidad a partir de una forma prescrita de señal. 10. Procedimiento de acuerdo con la reivindicación 9, caracterizado porque se calcula una duración (SDT) de transición de la señal (RP) de transición, igual al valor de la discontinuidad dividida por una pendiente (PT) prescrita. 11. Procedimiento de acuerdo con una cualquiera de las reivindicaciones 8 a 10, caracterizado porque la señal de transición es una rampa. 12. Procedimiento de acuerdo con una cualquiera de las reivindicaciones 8 a 11, caracterizado porque se detecta la citada discontinuidad al menos por el hecho de que para una de las ruedas el indicador (dij) de deslizamiento cambia de estado entre instantes sucesivos. 13. Procedimiento de acuerdo con una cualquiera de las reivindicaciones 8 a 12, en combinación con una de las reivindicaciones 2 a 7, caracterizado porque se detecta la citada discontinuidad al menos por el hecho de que el modo (MOD) de cálculo cambia entre instantes sucesivos. 14. Dispositivo para la puesta en práctica del procedimiento de acuerdo con una cualquiera de las reivindicaciones precedentes, destinado a estar embarcado en un vehículo, caracterizado porque comprende: 18 - al menos un sensor (1) de la velocidad (Wij) de rotación de cada rueda (ij) del vehículo, - un medio de obtención para cada rueda de un indicador (dij) de deslizamiento de rueda, apto para tomar un primer estado (dij=1) de deslizamiento de la rueda y un segundo estado (dij=0) de ausencia de deslizamiento de la rueda, - un medio (9) de cálculo de la velocidad (Vest) de desplazamiento longitudinal del vehículo, a partir de las velocidades (Wij) de rotación de ruedas medidas para las cuales el indicador (dij) de deslizamiento de rueda está en el segundo estado (dij=0) de ausencia de deslizamiento de la rueda, sin tener en cuenta las velocidades (Wij) de rotación de ruedas medidas para las cuales el indicador (dij) de deslizamiento de rueda está en el primer estado (dij=1) de deslizamiento. 19 21 22 23 24
Patentes similares o relacionadas:
Reconocimiento de carriles de dirección, del 21 de Agosto de 2019, de BAYERISCHE MOTOREN WERKE AKTIENGESELLSCHAFT: Procedimiento para proporcionar una estimación, de si un carril está limitado a una dirección, indicándose la estimación mediante una dimensión, por […]
Procedimiento y sistema para influir en el movimiento de una estructura de vehículo en un automóvil y vehículo controlado y regulado en sus procesos de movimiento, del 30 de Mayo de 2018, de VOLKSWAGEN AKTIENGESELLSCHAFT: Procedimiento para generar señales para influir en el movimiento de una estructura de vehículo , controlable o regulable en sus procesos de movimiento, de un […]
Sistema y método de monitorización del estado y conducción de un vehículo, del 19 de Julio de 2017, de CRAMBO, S.A: Sistema de monitorización del estado y conducción de un vehículoque comprende, al menos: (i) unos primeros medios regulables de detección de vibraciones […]
Procedimiento de evaluación del riesgo de colisión en una intersección, del 24 de Mayo de 2017, de RENAULT S.A.S.: Procedimiento de evaluación del riesgo de colisión entre un primer vehículo que se aproxima a una intersección y al menos un segundo vehículo que se desplaza […]
Método de estimación del estado de contacto con el suelo de un neumático, dispositivo para estimación del estado de contacto con el suelo de un neumático, del 26 de Octubre de 2016, de KABUSHIKI KAISHA BRIDGESTONE: Un método de estimación de un estado de contacto de un neumático que comprende los pasos de:
detectar una vibración del neumático durante la circulación en […]
Procedimiento para la determinación de una situación de frenado de emergencia de un vehículo, del 20 de Julio de 2016, de WABCO GMBH: Procedimiento para la determinación de una situación de frenado de emergencia de un primer vehículo propio , en el que el vehículo propio […]
Método para controlar un sistema de protección de ocupantes teniendo en cuenta al menos una señal de al menos un sensor de un sistema de control de la estabilidad, del 2 de Abril de 2014, de CONTINENTAL AUTOMOTIVE GMBH: Método para controlar un sistema de protección de ocupantes teniendo en cuenta
al menos una señal de al menos un sensor de dicho sistema […]
Sistema y método para compensación de señales de sensores en vehículos, del 8 de Enero de 2014, de ROBERT BOSCH GMBH: Un sistema para compensación de señal de un sensor de vehículo, comprendiendo el sistema:
un primer sensor configurado para generar una primera […]
Utilizamos cookies para mejorar nuestros servicios y mostrarle publicidad relevante. Si continua navegando, consideramos que acepta su uso. Puede obtener más información aquí. .
 Método de estimación del estado de contacto con el suelo de un neumático, dispositivo para estimación del estado de contacto con el suelo de un neumático, del 26 de Octubre de 2016, de KABUSHIKI KAISHA BRIDGESTONE: Un método de estimación de un estado de contacto de un neumático que comprende los pasos de:
detectar una vibración del neumático durante la circulación en […]
Método de estimación del estado de contacto con el suelo de un neumático, dispositivo para estimación del estado de contacto con el suelo de un neumático, del 26 de Octubre de 2016, de KABUSHIKI KAISHA BRIDGESTONE: Un método de estimación de un estado de contacto de un neumático que comprende los pasos de:
detectar una vibración del neumático durante la circulación en […]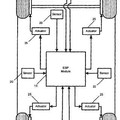 Sistema y método para compensación de señales de sensores en vehículos, del 8 de Enero de 2014, de ROBERT BOSCH GMBH: Un sistema para compensación de señal de un sensor de vehículo, comprendiendo el sistema:
un primer sensor configurado para generar una primera […]
Sistema y método para compensación de señales de sensores en vehículos, del 8 de Enero de 2014, de ROBERT BOSCH GMBH: Un sistema para compensación de señal de un sensor de vehículo, comprendiendo el sistema:
un primer sensor configurado para generar una primera […]