DISPOSITIVO Y MÉTODO PARA DISPONER PILAS DE OBJETOS PLANOS SOBRE PALÉS.
Dispositivo para paletizar pilas (13) de objetos planos - preferentemente sacos o sacos semiacabados - el cual presenta las siguientes características:
- al menos un área de paletización (1), donde al menos es cargado un palé (11), - al menos un dispositivo de carga que dispone las pilas (13) en el área de paletización (1) y que comprende al menos dos dispositivos de agarre (2a, 2b;12;20,21) para asir las pilas (13) y un medio de movimiento para desplazar los al menos dos dispositivos de agarre (2a,2b;12;20,21) de manera relativa con respecto al área de paletización (1), y - al menos un dispositivo de alimentación (6) que guía las pilas (13) hacia el dispositivo de carga, caracterizado porque el medio de movimiento presenta un riel (19; 24) que puede desplazarse en una dirección horizontal (x) y porque los al menos dos dispositivos de agarre (2a,2b;12;20,21) se encuentran sobre este riel (19; 24) común desplazable, de tal modo que su movimiento en la dirección de desplazamiento (x) del riel (19,24) se encuentra acoplado de forma segura
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2006/010085.
Solicitante: WINDMOLLER & HOLSCHER KG.
Nacionalidad solicitante: Alemania.
Dirección: MUNSTERSTRASSE 50 49525 LENGERICH ALEMANIA.
Inventor/es: KOLKER,MARTIN.
Fecha de Publicación: .
Fecha Solicitud PCT: 19 de Octubre de 2006.
Clasificación Internacional de Patentes:
- B65G57/06 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65G DISPOSITIVOS DE TRANSPORTE O ALMACENAJE, p. ej. TRANSPORTADORES PARA CARGAR O BASCULAR, SISTEMAS TRANSPORTADORES PARA TALLERES O TRANSPORTADORES NEUMATICOS DE TUBOS (embalajes B65B; manipulación de material delgado o filiforme, p. ej. hojas de papel o fibras B65H; grúas B66C; aparatos de elevación o arrastre,p. ej. montacargas, B66D; dispositivos para elevar o bajar mercancías para carga y descarga, p. ej. carretillas elevadoras, B66F 9/00; vaciado de botellas, jarras, latas, barricas, barriles o contendores similares, no previstos en otro lugar, B67C 9/00; distribución o trasvase de líquidos B67D; llenado o descarga de contenedores para gases licuados, solidificados o comprimidos F17C; sistemas de conducción para fluídos F17D). › B65G 57/00 Apilado de objetos (B65G 60/00 tiene prioridad; alimentación, apilado de hojas B65H). › Válvulas o puertas para soltar los objetos.
- B65G57/22 B65G 57/00 […] › en capas, cada una según una disposición horizontal predeterminada.
Clasificación PCT:
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia.
PDF original: ES-2360134_T3.pdf
Fragmento de la descripción:
La presente invención hace referencia a un dispositivo y a un método para disponer pilas de objetos planos sobre palés.
Se conocen métodos para cargar palés con pilas de objetos planos mediante la ayuda de dispositivos de paletización. Entre otros, el documento EP 0 652 171 B1 se ocupa de un dispositivo semejante. Por lo general, los objetos planos consisten en sacos o en sacos semiacabados tales como piezas de manguera. Estos objetos son fabricados con una velocidad de producción relativamente rápida, siendo reunidos en pilas que seguidamente son dispuestas sobre palés.
Pueden diferenciarse distintos tipos de dispositivos de paletización. De este modo, se conocen dispositivos de paletización que se apoyan sobre robots con brazos articulados giratorios, horizontales o verticales. Es común a estos tres tipos que consten de tantos ejes de rotación como posibilidades de movimiento, de manera que una mano del robot pueda ser orientada en el espacio del modo que sea necesario para las tareas de manipulación.
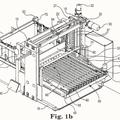
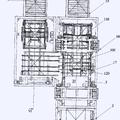
Sin embargo, otros dispositivos de paletización corresponden a la clase de "robots lineales”. Esta clase se caracteriza porque son posibles movimientos lineales a lo largo de los ejes del espacio (sistema de coordenadas cartesiano). Frecuentemente, un dispositivo de paletización semejante comprende un sistema de rieles mediante el cual un carro puede desplazarse en un plano horizontal. Por tanto, el carro comprende un dispositivo para desplazar el dispositivo de agarre en la dirección vertical. De forma adicional, la rotación puede ser posible alrededor de un eje, por ejemplo alrededor de un eje vertical, para hacer rotar el dispositivo de agarre y, con ello, poder posicionarlo en un ángulo deseado con respecto al palé. Un robot lineal semejante, por lo general, se encuentra diseñado como un robot pórtico. En este caso, los dispositivos de movimiento se apoyan sobre rieles que se apoyan sobre cuatro soportes, dado el caso también sobre más de cuatro, sobre el suelo, de manera que el palé a ser cargado pueda ser desplazado por debajo de los rieles en el área de paletización.
La presente invención puede ser empleada en robots lineales semejantes de forma particularmente ventajosa.
Por lo general, los dispositivos de paletización disponen de un área de paletización que es medida de modo tal que ésta pueda ser alojada en un palé estándar. La disposición de la pila sobre un palé semejante es efectuada por un dispositivo de agarre. Este dispositivo de agarre, generalmente, consiste en un par de brazos –pinza que puede recoger una pila en un momento determinado. A su vez, el dispositivo de agarre es desplazado por medios de movimiento, de modo que el dispositivo de agarre sea desplazado hacia el punto deseado. Por tanto, estos medios de movimiento permiten el movimiento del recogedor en un plano. Por lo general, dichos medios transportan el recogedor o el dispositivo de agarre desde el lugar donde el dispositivo de agarre recibe la pila, hasta el lugar donde la respectiva pila es depositada sobre el o los palés.
Otro elemento de un dispositivo de paletización semejante consiste en un dispositivo de alimentación que conduce la pila hacia el dispositivo de agarre. Por lo general, de este modo, las pilas son conducidas hacia un punto de entrega determinado. Cintas transportadoras o rodillos son con frecuencias los elementos determinantes de semejantes dispositivos de alimentación.
En el caso de un aumento de la velocidad con la cual deben ser producidos los objetos planos, los dispositivos de paletización del estado del arte se encuentran con limitaciones. De este modo, mientras tanto, se proporcionan con frecuencia varios dispositivos de paletización por detrás de los dispositivos modernos de producción de sacos. Sin embargo, esta medida es costosa y requiere de un valioso espacio dentro del área de producción. Asimismo, dos dispositivos de paletización semejantes producen también dos palés semivacíos cuando el resto de un encargo sólo es suficiente para la dotación de elementos de un palé.
El documento FR 2 584 381 A1 revela un método para cargar palés con pilas de objetos planos conforme al preámbulo de la reivindicación 10 y muestra un dispositivo para paletizar pilas de objetos planos conforme al preámbulo de la reivindicación 1, el cual presenta las siguientes características:
• un área de paletización donde es cargado un palé,
• un dispositivo de carga que dispone las pilas en el área de paletización y que comprende un dispositivo de agarre para asir las pilas y un medio de movimiento para el dispositivo de agarre relativamente con respecto al área de paletización, y
40
45
• un dispositivo de alimentación que guía las pilas hacia el dispositivo de carga, donde dos dispositivos de agarre se encuentran asociados al área de paletización.
No obstante, dispositivos semejantes son muy sofisticados y, por tanto, muy costosos.
Es objeto de la presente invención solucionar estas desventajas. Este objeto se alcanzará a través del dispositivo de la reivindicación 1 y del método de la reivindicación 10.
Los, al menos dos, dispositivos de agarre, por tanto, se encuentran asociados a un dispositivo de movimiento, donde tiene lugar un acoplamiento seguro del movimiento en al menos una dirección espacial (x,y,z,ϕ). A través de este acoplamiento seguro, los, al menos dos, dispositivos de agarre ya no disponen, respectivamente, de un dispositivo de movimiento independiente.
En comparación con dos dispositivos de agarre completamente independientes -los cuales naturalmente garantizan una redundancia en caso de un accidente -de este modo, sin embargo, puede economizarse en cuanto a gastos. De este modo pueden ser ascendidos y descendidos de forma conjunta dos dispositivos de agarre (dirección z). También puede ser ventajosa una rotación conjunta de al menos dos dispositivos de agarre (dirección ϕ). Naturalmente, el concepto comprende al menos una dirección de movimiento también en los casos en los que varias direcciones de movimiento se encuentran acopladas de forma segura.
Por otra parte, en particular para la seguridad de la redundancia, sin embargo, se considera ventajoso cuando con los al menos dos dispositivos de agarre puede ser cargada el área de paletización en su totalidad.
Incluso cuando un robot de paletización se encuentra provisto sólo de un dispositivo de agarre, es por lo general ventajoso que las pilas ya puedan ser rotadas en los puntos de entrega – o incluso previamente. Estas estaciones de rotación o de alineamiento pueden estar asociadas al dispositivo de alimentación y, con ello, tal como se ha mencionado, los recogedores se encuentran situados aguas arriba en la dirección de transporte de los objetos planos con respecto a sus medios de movimiento. De este modo, estas estaciones de alineamiento, dado el caso, pueden encontrarse inmovilizadas también con respecto al armazón de la máquina. En este caso puede renunciarse a medios de rotación que deban ser desplazados por los medios de movimiento. De esta manera disminuye la masa de los componentes de la máquina que deben ser desplazados por los medios de movimiento. De este modo pueden alcanzarse también incrementos de la velocidad. Esta variante desconocida hasta el momento, no obstante, produce un efecto particularmente positivo en los ejemplos de ejecución conformes a la invención y en otras variantes de la invención. Son posibles otros ahorros en cuanto a costes cuando los al menos dos dispositivos de agarre son alimentados por un dispositivo de alimentación común.
Otros ejemplos de ejecución de la presente invención resultan de la presente descripción y de las reivindicaciones.
Las figuras muestran, por separado:
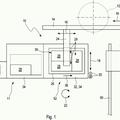
Figura 1: un dibujo (vista superior) de un ejemplo de ejecución que no forma parte de la presente invención;
Figura 2: un dibujo (vista superior) de un primer ejemplo de ejecución de la invención;
Figura 3: un dibujo (vista superior) de un segundo ejemplo de ejecución de la invención;
Figura 4: un dibujo (vista superior) de una primera disposición de pares de brazos-pinza en el caso de un recogedor doble;
Figura 5: un dibujo (vista superior) de una segunda disposición de pares de brazos-pinza en el caso de un recogedor doble;
Figuras 6, 7 y 8: una representación de la ejecución de un depósito... [Seguir leyendo]
Reivindicaciones:
1. Dispositivo para paletizar pilas (13) de objetos planos – preferentemente sacos o sacos semiacabados – el cual presenta las siguientes características:
- al menos un área de paletización (1), donde al menos es cargado un palé (11), -al menos un dispositivo de carga que dispone las pilas (13) en el área de paletización (1) y que comprende al menos dos dispositivos de agarre (2a, 2b;12;20,21) para asir las pilas (13) y un medio de movimiento para desplazar los al menos dos dispositivos de agarre (2a,2b;12;20,21) de manera relativa con respecto al área de paletización (1), y
- al menos un dispositivo de alimentación (6) que guía las pilas (13) hacia el dispositivo de carga, caracterizado porque el medio de movimiento presenta un riel (19; 24) que puede desplazarse en una dirección horizontal (x) y porque los al menos dos dispositivos de agarre (2a,2b;12;20,21) se encuentran sobre este riel (19; 24) común desplazable, de tal modo que su movimiento en la dirección de desplazamiento (x) del riel (19,24) se encuentra acoplado de forma segura.
2. Dispositivo conforme a la reivindicación precedente, caracterizado porque el medio de movimiento acopla el 15 movimiento de los, al menos dos, dispositivos de agarre al máximo en la dirección horizontal (x).
3. Dispositivo conforme a una de las reivindicaciones precedentes, caracterizado porque el dispositivo de alimentación (6) dispone de estaciones de rotación (8a, 8b, 18a, 18b) para alinear las pilas (13).
4. Dispositivo conforme a una de las reivindicaciones precedentes, caracterizado porque con los, al menos dos, dispositivos de agarre (2a, 2b;12;20,21), respectivamente, puede ser cargada el área de paletización (1) en su
20 totalidad, o porque con los, al menos, dos dispositivos de agarre (2a,2b;12;20,21), respectivamente, sólo puede ser cargada un área parcial del área de paletización.
5. Dispositivo conforme a una de las reivindicaciones precedentes 1, 3 ó 4, caracterizado porque
- en al menos dos dispositivos de agarre (20,21) el movimiento de rotación se acopla sobre un eje vertical,
- y porque los, al menos dos, dispositivos de agarre (20,21) se encuentran alineados de forma paralela uno 25 con respecto al otro
- o porque los, al menos dos, dispositivos de agarre (20,21) se encuentran alineados de forma ortogonal uno con respecto al otro.
6. Dispositivo conforme a una de las reivindicaciones precedentes, caracterizado porque el dispositivo de alimentación (6,16a, 16b) y el dispositivo de carga se encuentran definidos de modo tal que las pilas (13) de objetos planos pueden ser entregadas en puntos de entrega desde el dispositivo de alimentación (6,16a, 16b) hacia el dispositivo de carga, donde dichos puntos de entrega se encuentran en diferentes puntos en al menos una dirección espacial (x,y,z,ϕ).
7. Método para cargar palés con pilas (13) de objetos planos – preferentemente sacos o sacos semiacabados –, donde se presentan las siguientes características del método: -carga de al menos un palé (11) en un área de paletización (1) proporcionada para ello,
- disposición de las pilas (13) sobre al menos un palé (11) con al menos un dispositivo de carga,
- guía de las pilas (13) hacia el dispositivo de carga con un dispositivo de alimentación (6),
- carga de al menos un palé (11) con al menos dos dispositivos de agarre (2a, 2b;12;20,21),
caracterizado porque los, al menos dos, dispositivos de agarre (2a,2b;12;20,21) son conducidos en un riel (19;24)
40 común que puede desplazarse en una dirección horizontal (x), de modo que su movimiento se encuentra acoplado de forma segura en la dirección de desplazamiento (x) de los rieles (19;24).
8. Método conforme a la reivindicación precedente, caracterizado porque cada dispositivo de agarre (2a, 2b;12;20,21) carga un área exclusiva del palé (11).
9. Método conforme a la reivindicación precedente para operar un dispositivo conforme a la reivindicación 6, caracterizado porque las siguientes características del método se repiten al menos una vez:
la segunda pila (13n + 1) de objetos planos que sigue a una primera pila (13n) es entregada en al menos una dirección espacial (x), donde la posición del punto de entrega es variable, en la misma posición en la cual la primera pila (13n) ha sido o es depositada.
Patentes similares o relacionadas:
Dispositivo de carga, del 5 de Junio de 2019, de BEUMER Group GmbH & Co. KG: Dispositivo de carga para cargar elementos de carga fraccionada por capas en una superficie de carga , con un cabezal de carga que puede desplazarse al menos […]
 Aparato y método para apilar artículos, del 11 de Octubre de 2018, de Alliance Machine Systems International, LLC: Un método para apilar objetos, que comprende las etapas de:
- recibir un primer objeto en una pluralidad de horquillas , de una mesa que está conectada […]
Aparato y método para apilar artículos, del 11 de Octubre de 2018, de Alliance Machine Systems International, LLC: Un método para apilar objetos, que comprende las etapas de:
- recibir un primer objeto en una pluralidad de horquillas , de una mesa que está conectada […]
Paletizador, del 31 de Mayo de 2017, de SWISSLOG AG: Un dispositivo de agarre que comprende un bastidor de soporte provisto de, como mínimo, una fila de elementos de horquilla que comprenden […]
Dispositivo y método para empilar capas en un soporte, del 10 de Agosto de 2016, de Dematic GmbH: Dispositivo para apilar automáticamente artículos embalados en un soporte en una disposición física predeterminada para formar una pila, que tiene: - Al menos un […]
Procedimiento para el manejo de artículos, del 13 de Abril de 2016, de KRONES AKTIENGESELLSCHAFT: Procedimiento para el manejo de artículos mediante una estación de carga que incluye un cabezal de persiana con una abertura […]
 Dispositivo y procedimiento para la deposición de una serie de paquetes formada por al menos un paquete sobre una plataforma de carga, del 3 de Marzo de 2016, de SEGBERT GMBH & CO. KG: Dispositivo para la deposición de una serie de paquetes (R, R1, R2, R3, R4) formada por al menos un paquete P sobre una plataforma de carga , con […]
Dispositivo y procedimiento para la deposición de una serie de paquetes formada por al menos un paquete sobre una plataforma de carga, del 3 de Marzo de 2016, de SEGBERT GMBH & CO. KG: Dispositivo para la deposición de una serie de paquetes (R, R1, R2, R3, R4) formada por al menos un paquete P sobre una plataforma de carga , con […]
 Dispositivo para el transporte y la manipulación de productos, del 27 de Enero de 2016, de Langhammer GmbH: Procedimiento para la manipulación de productos en una instalación de manipulación de productos que comprende las siguientes etapas de procedimiento:
[…]
Dispositivo para el transporte y la manipulación de productos, del 27 de Enero de 2016, de Langhammer GmbH: Procedimiento para la manipulación de productos en una instalación de manipulación de productos que comprende las siguientes etapas de procedimiento:
[…]
 Dispositivo de paletización, del 13 de Enero de 2016, de A.C.M.I. - Societa' Per Azioni: Dispositivo de paletización , que comprende un plano inferior capaz de recibir a modo de soporte un palé y un dispositivo de carga verticalmente […]
Dispositivo de paletización, del 13 de Enero de 2016, de A.C.M.I. - Societa' Per Azioni: Dispositivo de paletización , que comprende un plano inferior capaz de recibir a modo de soporte un palé y un dispositivo de carga verticalmente […]