CORRECCIÓN DE ERRORES INDUCIDOS POR LA TROPOSFERA EN LOS SISTEMAS DE POSICIONAMIENTO GLOBAL.
Un procedimiento de obtención de datos de retardos troposféricos para uso al aumentar la exactitud con la que puede determinarse la ubicación de un receptor de usuario (220) en un sistema global de navegación por satélite (GNSS) (100),
comprendiendo el procedimiento las etapas de generar un primer conjunto de valores de retardos troposféricos aproximados aplicables a diversas ubicaciones geográficas del receptor de usuario a partir de un primer modelo (230), que es conocido en sí, en una ubicación (200) alejada de dicho receptor de usuario; generar un segundo conjunto de valores de retardos troposféricos que sean exactos y aplicables a dichas diversas ubicaciones geográficas del receptor de usuario a partir de un segundo modelo, que es un modelo meteorológico en una ubicación alejada de dicha receptor de usuario; desarrollar un conjunto de modificaciones de valores de retardos troposféricos (260) aplicables a dicho primer modelo de manera que juntos, dicho primer modelo y dichas modificaciones de valores de retardos troposféricos pueden proporcionar un conjunto de valores de retardos troposféricos sustancialmente en concordancia con dicho segundo conjunto de valores de retardos troposféricos, y comunicar dicho conjunto de modificaciones de valores de retardos troposféricos a dicho receptor de usuario para modificar los valores de retardos troposféricos aproximados de dicho receptor de usuario
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/GB2004/001676.
Solicitante: THE SECRETARY OF STATE FOR DEFENCE.
Nacionalidad solicitante: Reino Unido.
Dirección: DSTL PORTON DOWN SALISBURY WILTSHIRE SP4 0JQ REINO UNIDO.
Inventor/es: POWE,Matthew,Duncan,Nottingham Scientific Ltd, BUTCHER,James,D/IPR Formalities Section, OWEN,John,Ifor,Rewbridge.
Fecha de Publicación: .
Fecha Solicitud PCT: 19 de Abril de 2004.
Clasificación PCT:
- G01S19/07 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 19/00 Sistemas de posicionamiento por satélite; Determinación de la posición, de la velocidad o de la actitud por medio de señales transmitidas por tales sistemas. › proporcionando datos para corregir los datos de posicionamiento medidos, p. ej. DGPS [GPS diferencial] o correcciones ionosféricas.
Clasificación antigua:
- G01S5/14 G01S […] › G01S 5/00 Establecimiento de la posición mediante la coordinación de dos o más determinaciones de dirección o de líneas de posición; Establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia. › Por determinación de distancias absolutas a una pluralidad de puntos espaciados de emplazamiento conocido.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
PDF original: ES-2356821_T3.pdf



Fragmento de la descripción:
La presente invención se refiere a desarrollos pensados para aumentar la exactitud obtenible de los sistemas globales de navegación por satélite (GNSS).
Actualmente, existen dos sistemas GPS a disposición del público, conocidos como NAVSTAR, de propiedad 5 de los EE.UU., y GLONASS, de propiedad de la Federación Rusa. Estos han existido durante aproximadamente dos décadas, pero en el futuro inmediato se espera que la ampliación regional europea del GPS comenzará a proporcionar sus servicios, seguido a los pocos años por un sistema europeo bajo el nombre de GALILEO.
Los sistemas existentes han sido perfeccionados progresivamente de manera que usando una implementación de fase diferencial puede lograrse potencialmente una exactitud de localización de menos de 2 cm a lo 10 largo de una línea base de 1000 km, pero con un coste de cálculo y del tiempo tomado para determinar la ubicación. Las mediciones en tiempo real o casi en tiempo real tienen una resolución correspondientemente más baja, y actualmente los requisitos para alta precisión significan que se emplean necesariamente ampliaciones adicionales para complementar la información GNSS. Además, estas podrían incluir un receptor que toma mediciones procedentes de muchos satélites, hasta todos aquellos visibles para él por medio de las cuales calcular una solución de posición 15 determinada en exceso y rechazar los datos incoherentes para mejorar la exactitud de la solución de posición. Tal sistema puede usar datos procedentes de más de una constelación de satélites GNSS, GPS y GLONASS.
Aunque el GNSS se usa principalmente para establecer la ubicación de un usuario que tiene un receptor adecuado, normalmente móvil, también se usa con respecto a proporcionar señales de tiempo exactas a los usuarios cuyas ubicaciones ya se conocen o no tienen que conocerse. Los conjuntos de determinación de posición de un solo 20 usuario tienen receptores sencillos de transmisiones por satélite y un conjunto de circuitos que efectúa el modelado de al menos algunos efectos atmosféricos que influyen en la recepción de señal para en cierto modo eliminar los errores en la posición calculada.
Sin embargo, si el usuario está interesado en obtener una posición o una medición de tiempo, surge un error significativo de la incapacidad de modelar exactamente el retardo en las señales GNSS causado por la atmósfera, 25 concretamente la ionosfera y la troposfera.
Los usuarios de navegación por satélite generan su posición tridimensional y la solución de tiempo procesando cuatro o más mediciones de pseudoalcance a cuatro o más satélites. Una medición de pseudoalcance es la diferencia entre el tiempo de reloj del satélite en la emisión de la señal y el tiempo de reloj del receptor del usuario en la recepción. La observación del pseudoalcance está relacionada, por lo tanto, con el tiempo de propagación de radio y, 30 por lo tanto, el alcance entre el satélite y el usuario. Como las estimaciones de la posición del satélite son conocidas (son emitidas por el satélite) un usuario puede resolver las cuatro incógnitas (la posición tridimensional y el tiempo) usando cuatro o más observaciones de pseudoalcance. Como parte del filtro de la solución de navegación/tiempo del usuario, se corrigen las variaciones en el tiempo de propagación de radio de las observaciones de pseudoalcance a partir de esta propagación en el espacio libre. 35
En el filtro de la solución de navegación/tiempo del usuario, se aplican varias correcciones a la medición de pseudoalcance sin tratar incluyendo correcciones troposféricas, ionosféricas y relativistas.
En el documento WO-A1-03/069366 Se ha sugerido cómo adaptar los retardos ionosféricos y mediante el uso de un emplazamiento denominado del servidor que recibe señales de satélites GNSS, deduce factores de corrección aplicables a receptores GPS en las inmediaciones antes de emitirlas localmente para que sean recibidas por tal 40 receptor GPS y usadas para modificar el modelo embarcado usado para corregir tales retardos. Para retardos ionosféricos, que comprenden un pequeño grado de refracción del recorrido de la señal y un cambio más significativo en la velocidad de la señal, los retardos y las correcciones para los mismos son sustancialmente constantes a lo largo de un periodo de tiempo que requiere actualización de datos de corrección como máximo unas pocas veces por día.
Los efectos troposféricos, por otra parte, son de cambio relativamente rápido (o de corta duración) y 45 localizados geográficamente, resultando fundamentalmente de fenómenos del tiempo o meteorológicos más que fenómenos climáticos. Sin embargo, la troposfera constituye una de las mayores fuentes de error identificadas en el efecto que tiene sobre las señales que se propagan a través de la misma. La troposfera introduce curvatura de los rayos y, por lo tanto, un aumento en el recorrido de la señal que constituye un retardo de la señal que está influido por varios factores meteorológicos, pero particularmente el contenido de agua. Los retardos troposféricos son difíciles de 50 modelar con sencillez.
Tradicionalmente, el retardo troposférico ha sido tratado mediante el uso de modelos de retardo troposférico global que funcionan a partir de parámetros denominados climáticos que son relativamente invariantes y puede almacenarse en el receptor del usuario, pero estos parámetros constituyen, como mucho, una expectativa media o estacional, pero no una que esté basada meteorológicamente, es decir, basada en condiciones del tiempo actuales, 55 recientes o predichas.
Uno de tales modelos que se usa y puede incorporarse en un receptor GPS portátil es el modelo de retardo
troposférico cenital RTCA para usuarios de WAAS descrito en el documento “Minimum Operational Performance Standards for Global Positioning Systems/Wide Area Augmentation System Airborne Equipment” RTCA D0229C, noviembre de 2001.
Tal modelo es útil en la medida en que simplifica los retardos troposféricos a valores cenitales (identificados en este documento como DZ o ZTD) pero aún existe la necesidad de mapear estos para los efectos de la elevación 5 causados por bajas inclinaciones del satélite respecto al usuario. Uno de tales modelos de mapeo es descrito por Niell en el documento “Global mapping functions for the atmosphere delay at radio wavelengths”, Journal of Geophysical Research Vol. 101, Nº B2, páginas 3227-3246, febrero de 1996.
Sin embargo, aunque estos modelos permiten la incorporación en un receptor del usuario son de capacidad inherentemente limitada para tener en cuenta cambios en las condiciones troposféricas que afectan a los retardos de 10 señal causados por el tiempo constantemente cambiante y localizado.
El documento US2002/0199196 describe un procedimiento y aparato para determinar la posición de un terminal de usuario. El procedimiento comprende recibir en el terminal de usuario una señal de televisión emitida procedente de un transmisor de señal de televisión; determinar un primer pseudoalcance entre el terminal de usuario y el transmisor de señal de televisión basado en una componente conocida de la señal de televisión emitida; recibir en el 15 terminal de usuario una señal de posicionamiento global procedente de un satélite de posicionamiento global; determinar un segundo pseudoalcance entre el terminal de usuario y el satélite de posicionamiento global basado en la señal de posicionamiento global; y determinar una posición del terminal de usuario basada en el primer y segundo pseudoalcances, una ubicación del transmisor de señal de televisión, y una ubicación del satélite de posicionamiento global. Una ubicación puede ajustar el valor de cada pseudoalcance según la velocidad de propagación troposférica. 20
Aunque existen modelos para obtener datos troposféricos exactos teniendo en cuenta las condiciones meteorológicas en una o más regiones, como por predicción numérica del tiempo (NWP), la naturaleza localizada y, por lo tanto, la gran cantidad de datos generados ha sido percibida como la confirmación de que actualmente no pueden usarse para mejorar perceptiblemente los dispositivos factibles; es decir, debido tanto a que estos datos son demasiado grandes para ser enviados por sistemas de comunicación que están disponibles para los usuarios móviles 25 como a la limitada capacidad de proceso dentro de una cantidad de tiempo razonable.
En un primer aspecto, la presente invención proporciona un procedimiento de obtención de datos de... [Seguir leyendo]
Reivindicaciones:
1. Un procedimiento de obtención de datos de retardos troposféricos para uso al aumentar la exactitud con la que puede determinarse la ubicación de un receptor de usuario (220) en un sistema global de navegación por satélite (GNSS) (100), comprendiendo el procedimiento las etapas de
generar un primer conjunto de valores de retardos troposféricos aproximados aplicables a diversas ubicaciones geográficas del receptor de usuario a partir de un primer modelo (230), que es conocido en sí, en una ubicación (200) 5 alejada de dicho receptor de usuario;
generar un segundo conjunto de valores de retardos troposféricos que sean exactos y aplicables a dichas diversas ubicaciones geográficas del receptor de usuario a partir de un segundo modelo, que es un modelo meteorológico en una ubicación alejada de dicha receptor de usuario;
desarrollar un conjunto de modificaciones de valores de retardos troposféricos (260) aplicables a dicho primer modelo 10 de manera que juntos, dicho primer modelo y dichas modificaciones de valores de retardos troposféricos pueden proporcionar un conjunto de valores de retardos troposféricos sustancialmente en concordancia con dicho segundo conjunto de valores de retardos troposféricos, y
comunicar dicho conjunto de modificaciones de valores de retardos troposféricos a dicho receptor de usuario para modificar los valores de retardos troposféricos aproximados de dicho receptor de usuario. 15
2. Un procedimiento según la reivindicación 1, en el que el primer modelo está basado en parámetros no meteorológicos.
3. Un procedimiento según la reivindicación 2, en el que dichos parámetros no meteorológicos comprenden al menos uno de la época del año, la latitud y la altitud.
4. Un procedimiento según la reivindicación 3, en el que dichos parámetros no meteorológicos comprenden al 20 menos uno de la longitud y el momento del día.
5. Un procedimiento según una cualquiera de las reivindicaciones 1 a 4, en el que dichos conjuntos de valores de retardos troposféricos comprenden valores de retardos troposféricos cenitales.
6. Un procedimiento según la reivindicación 5, en el que los primeros modos contienen una función de mapeo que relaciona valores de retardos troposféricos en un ángulo de elevación dado con los valores de retardos 25 troposféricos cenitales.
7. Un procedimiento según la reivindicación 6, en el que dicho conjunto de modificaciones de valores de retardos troposféricos comprende un conjunto de modificaciones para uso con la función de mapeo del primer modelo.
8. Un procedimiento según una cualquiera de las reivindicaciones 1 a 7, en el que las modificaciones de valores de retardo son las diferencias entre valores correspondientes de 30
- el primer conjunto de valores de retardos troposféricos aproximados atribuibles al primer modelo y
- el segundo conjunto de valores de retardos troposféricos exactos atribuibles al segundo modelo, que es un modelo meteorológico.
9. Un procedimiento según la reivindicación 8, en el que las modificaciones de valores de retardos se expresan como un cambio fraccional a partir de los valores del primer conjunto de valores de retardos troposféricos. 35
10. Un procedimiento según una cualquiera de las reivindicaciones 1 a 9, en el que el conjunto de modificaciones de valores de retardos se expresa como un grupo de datos, teniendo cada modificación un valor que se determina para un punto de cuadrícula individual sobre al menos una parte de la superficie de la tierra.
11. Un procedimiento según la reivindicación 10, en el que dicho conjunto de modificaciones se expresa como un archivo de datos digitales. 40
12. Un procedimiento según la reivindicación 11, en el que dicho archivo de datos digitales es una imagen en escala de grises de palabras de múltiples bits, representando cada palabra una ubicación de la región.
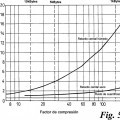
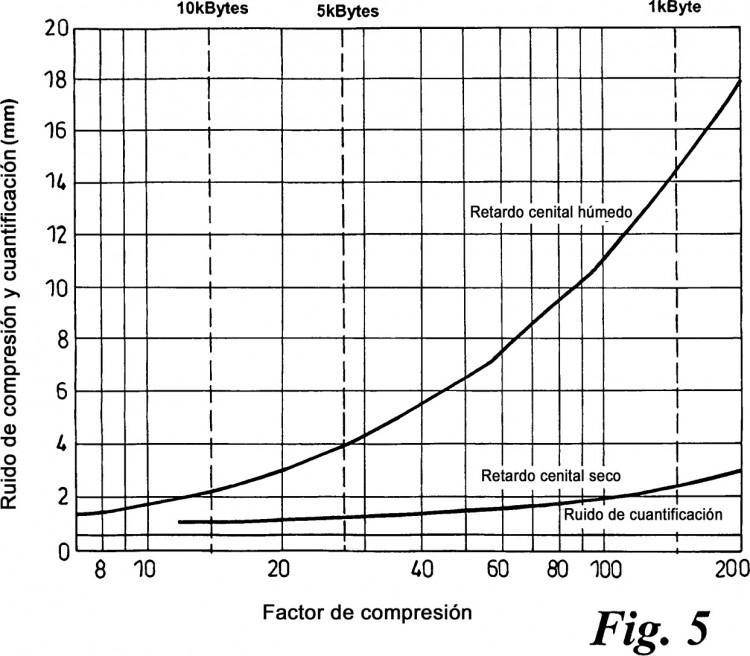
13. Un procedimiento según la reivindicación 12, que comprende las etapas adicionales de aplicar reducción de datos (270) al conjunto de modificaciones de valores de retardos troposféricos para obtener un conjunto reducido de modificaciones de valores de retardos troposféricos para la comunicación a un usuario. 45
14. Un procedimiento según la reivindicación 13, en el que la reducción de datos es un procedimiento de compresión de imagen.
15. Un procedimiento según la reivindicación 13 o la reivindicación 14, que comprende reducir el tamaño de los datos mediante reducción de datos con pérdidas.
16. Un procedimiento según la reivindicación 15, que comprende efectuar reducción de datos reduciendo el archivo de datos de conjuntos de correcciones según un estándar JPEG 2000 o JPEG 90.
17. Un procedimiento según cualquiera de las reivindicaciones precedentes, en el que dichos valores de retardos troposféricos exactos se obtienen mediante una técnica de trazado de rayos.
18. Un procedimiento según la reivindicación 17, en el que dichos valores de retardos troposféricos exactos se 5 obtienen mediante generación de campo de índice de refracción tridimensional.
19. Un procedimiento según cualquiera de las reivindicaciones precedentes, en el que dicho modelo meteorológico está basado en datos de predicción numérica del tiempo (NWP) para una región de la tierra.
20. Un procedimiento según una cualquiera de las reivindicaciones 17 a 19, en el que dicho modelo meteorológico o cada una de dichas modificaciones de valores de retardos troposféricos es aumentado por datos 10 meteorológicos observados directamente.
21. Un procedimiento según la reivindicación 20, en el que dichos datos observados directamente tienen una resolución menor que los datos de NWP.
22. Un procedimiento según la reivindicación 20 o la reivindicación 21, en el que dichos datos meteorológicos observados directamente se obtienen como un conjunto de datos relacionados con una región de la superficie de la 15 tierra que corresponde a al menos parte de los datos de NWP.
23. Un procedimiento según una cualquiera de las reivindicaciones 19 a 22, en el que dicha región es sustancialmente global.
24. Un procedimiento según una cualquiera de las reivindicaciones 17 a 23, que comprende predecir valores de retardos troposféricos exactos en el futuro a partir de dicha información meteorológica y desarrollar un conjunto de 20 predicciones de modificaciones de valores de retardos para dicha región geográfica de la superficie de la tierra, por medio de lo cual cada miembro de dicho conjunto de predicciones describe una modificación de valor de retardo que se vuelve actual como una función de tiempo desde el desarrollo.
25. Un procedimiento según una cualquiera de las reivindicaciones precedentes, por medio del cual el conjunto de modificaciones de valores de retardos troposféricos se comunica a dicho receptor por un canal de comunicación o 25 enlace de datos.
26. Un procedimiento según la reivindicación 25 cuando depende de la reivindicación 24, que comprende comunicar dicho conjunto de predicciones de modificaciones de valores de retardos como un lote y usar miembros del conjunto cuando el momento para el cual cada uno fue predicho se vuelve actual con respecto al pronóstico.
27. Un procedimiento según cualquiera de las reivindicaciones precedentes, que comprende comunicar al menos 30 parte del conjunto de modificaciones de valores de retardos a al menos un satélite en órbita (1101, 1102,...) y retransmitir al menos parte de dicho conjunto a dicho receptor desde dicho satélite en órbita.
28. Un procedimiento según cualquiera de las reivindicaciones precedentes, en el que sólo esa parte del conjunto de modificaciones de valores de retardos que puede ser utilizada por un receptor en una región dentro del alcance de un satélite (1101, 1102,...) se comunica a dicho satélite. 35
29. Un procedimiento según la reivindicación 13 y cualquiera de las reivindicaciones subordinadas de la misma, que comprende aplicar reducción de datos suficiente para permitir la transmisión de todo o parte de dicho conjunto de modificaciones de valores de retardos utilizables por dicho receptor dentro de un tiempo dictado por la disponibilidad de transmisión y la velocidad de transmisión del satélite, siendo dicho tiempo sustancialmente inferior al tiempo de validez de la información meteorológica usada por el modelo meteorológico. 40
30. Un procedimiento según la reivindicación 29, en el que la reducción de datos está dispuesta para permitir la transmisión de datos de modificación de valor de retardo a un receptor a una velocidad de transmisión de datos comprendida entre 25 y 500 bits/s.
31. Un procedimiento según la reivindicación 30, en el que la reducción de datos está dispuesta para permitir la transmisión de datos de modificación de valor de retardo comprendida entre 200 y 250 bits/s. 45
32. Aparato que comprende medios adaptados para llevar a cabo los procedimientos de cualquiera de las reivindicaciones 1-31.
33. Un receptor de sistema global de navegación por satélite (GNSS) (220) que puede calcular, con mayor exactitud, la ubicación de dicho receptor, o el tiempo actual, comprendiendo dicho receptor
medios (130) accionables para generar, a partir de un modelo embarcado de datos no meteorológicos, un primer 50 conjunto de valores de retardos troposféricos aproximados aplicables a señales recibidas desde una pluralidad de dichos satélites y calcular una posición aproximada del receptor en relación con la superficie de la tierra o el tiempo,
caracterizado porque el receptor también comprende
medios accionables para recibir un conjunto de modificaciones de valores de retardos troposféricos obtenidos previamente a partir de datos meteorológicos,
medios para corregir el primer conjunto de valores de retardos troposféricos aproximados de acuerdo con el conjunto de modificaciones de valores de retardos troposféricos, 5
y medios para calcular la ubicación del receptor o el tiempo.
34. Un receptor según la reivindicación 33, en el que dichos medios para corregir el primer conjunto de valores de retardos troposféricos aproximados son accionables para efectuar una de una interpolación y una extrapolación de dichas modificaciones según la posición calculada del usuario en relación con ubicaciones para las cuales se han obtenido las modificaciones. 10
Patentes similares o relacionadas:
SISTEMA DE INSPECCIÓN EN VUELO Y PROCEDIMIENTO PARA DICHO SISTEMA, del 29 de Abril de 2019, de INGENIO 3000, S.L: Sistema de inspección en vuelo, del tipo que comprenden, al menos, un sensor óptico para toma de imágenes montado en un gimbal a su vez montado […]
POSICIONAMIENTO OPTIMIZADO DE DISPOSITIVOS ELECTRÓNICOS DE BAJO CONSUMO ENERGÉTICO, del 21 de Diciembre de 2017, de ROKUBUN S.L: Diferentes aspectos de la invención implementan una arquitectura distribuida que permite a dispositivos móviles de bajo consumo energético procesar la información de […]
Receptor SBAS mejorado, del 2 de Agosto de 2017, de TELESPAZIO S.P.A: Un receptor SBAS configurado para recibir mensajes SBAS que contienen datos de aumentación y para proporcionar a uno o más receptores GPS […]
Sistema y procedimiento de difusión de información en un sistema de satélites de doble frecuencia, del 19 de Abril de 2017, de THALES: Procedimiento para transmitir información o datos "de corrección" Da en un sistema de navegación para satélites de doble frecuencia que comprende al menos un satélite […]
Proporcionar y usar mensajes que comprenden información de localización, del 22 de Marzo de 2017, de Nokia Technologies OY: Un método que comprende: recibir o ensamblar un mensaje que incluye información de localización y un identificador de tiempo de referencia, […]
Procedimiento y sistema de navegación en tiempo real con la ayuda de señales radioeléctricas de tres portadoras emitidas por satélites y de correcciones ionosféricas, del 8 de Febrero de 2017, de ORGANISATION INTERGOUVERNEMENTALE DITE AGENCE SPATIALE EUROPEENNE: Procedimiento de navegación en tiempo real con la ayuda de señales radioeléctricas de tres portadoras de primera, segunda y tercera frecuencias distintas, de valores […]
Sistema de aumento de la disponibilidad y de las prestaciones de un sistema de geolocalización por satélite, del 23 de Noviembre de 2016, de THALES: Sistema de aumento de las prestaciones de un sistema de geolocalización por satélite compuesto al menos por un satélite y al menos por un receptor de posicionamiento […]
Instalación de vigilancia para un sistema de determinación de posición por satélite aumentado y sistema de determinación de posición por satélite aumentado, del 26 de Octubre de 2016, de Thales Deutschland GmbH: Instalación de vigilancia para un sistema de determinación de posición por satélite, aumentado, el cual presenta una estación de referencia con una instalación […]