AYUDA A LA CONDUCCIÓN DE UN VEHÍCULO.
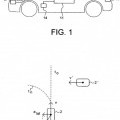
Sistema (1) para suministrar información para la ayuda a la conducción de un vehículo (2),
comprendiendo el sistema: - unidades sensoras (10) para la recogida de datos de los sensores referentes al vehículo y a su entorno, y - una unidad de procesamiento (11) para: • determinar el coste (C) de pares (30', 31, 32) de valores de la aceleración en base a los datos de los sensores, representando cada par de valores de la aceleración una aceleración longitudinal (alon) y una aceleración transversal (alat) del vehículo, • seleccionar un par de valores de la aceleración de coste mínimo, y para • suministrar información para la ayuda a la conducción que incluye el par de valores de la aceleración de coste mínimo
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/NL2008/050108.
Solicitante: NEDERLANDSE ORGANISATIE VOOR TOEGEPAST-NATUURWETENSCHAPPELIJK ONDERZOEK TNO.
Nacionalidad solicitante: Países Bajos.
Dirección: SCHOEMAKERSTRAAT 97 2628 VK DELFT PAISES BAJOS.
Inventor/es: SCHUTYSER,Pieter Jan, PLOEG,Jeroen, DURINGHOF,Hans-Martin.
Fecha de Publicación: .
Fecha Solicitud PCT: 22 de Febrero de 2008.
Clasificación Internacional de Patentes:
- B60W10/18 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60W CONTROL CONJUGADO DE VARIAS SUBUNIDADES DE UN VEHICULO DE DIFERENTE TIPO O FUNCION; SISTEMAS DE CONTROL ESPECIALMENTE ADAPTADOS PARA VEHICULOS HIBRIDOS; SISTEMAS DE CONTROL DE LA CONDUCCION DE VEHICULOS TERRESTRES NO RELACIONADOS CON EL CONTROL DE UNA SUBUNIDAD PARTICULAR. › B60W 10/00 Control conjugado de subunidades de vehículo de diferentes tipos o funciones (para propulsión de vehículos de tracción exclusivamente eléctrica con una fuente de energía interior al vehículo B60L 50/00 - B60L 58/00). › incluyendo el control de sistemas de frenado.
- B60W10/20 B60W 10/00 […] › incluyendo el control de sistemas de dirección.
- B62D15/02F6
- G06Q10/00B
- G06Q10/00C
- G06Q10/00D
Clasificación PCT:
- B60W10/06 B60W 10/00 […] › incluyendo el control de motores de combustión.
- B60W10/10 B60W 10/00 […] › incluyendo el control de cajas de cambio de velocidades.
- B60W10/18 B60W 10/00 […] › incluyendo el control de sistemas de frenado.
- B60W10/20 B60W 10/00 […] › incluyendo el control de sistemas de dirección.
- B60W30/02 B60W […] › B60W 30/00 Funciones de sistemas de ayuda a la conducción de vehículos terrestres no relacionados con el control de una subunidad particular, p.ej. sistemas que utilizan el control conjugado de varias subunidades del vehículo. › Control de la estabilidad en la conducción del vehículo.
- B60W30/08 B60W 30/00 […] › Anticipación o prevención de colisiones probables o inminentes.
- B62D15/02 B […] › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62D VEHICULOS DE MOTOR; REMOLQUES (dirección o guiado de máquinas o instrumentos agrícolas según un recorrido determinado A01B 69/00; ruedas, ruedecillas pivotantes, mejora de la adherencia de ruedas B60B; neumáticos para vehículos, inflado de neumáticos, cambio o reparación de neumáticos B60C; conexiones entre vehículos de un mismo tren o de un conjunto similar B60D; vehículos raíl-carretera, vehículos anfibios o transformables B60F; disposiciones de suspensión B60G; calefacción, refrigeración, ventilación u otros dispositivos de tratamiento del aire B60H; ventanas, parabrisas, techos descapotables, puertas o dispositivos similares, cubiertas de protección para vehículos fuera de servicio B60J; disposiciones de conjuntos de propulsión, accionamientos auxiliares, transmisiones, disposición de instrumentos o tableros de a bordo B60K; equipo eléctrico o propulsión de vehículos de tracción eléctrica B60L; alimentación de energía eléctrica para vehículos de tracción eléctrica B60M; disposiciones para pasajeros no previstas en otro lugar B60N; vehículos adaptados al transporte de cargas o para llevar cargas u objetos especiales B60P; adaptación de los dispositivos de señalización o de iluminación, su montaje o soporte, circuitos a este efecto, para vehículos en general B60Q; vehículos, equipos o partes de vehículos, no previstos en otro lugar B60R; servicio,limpieza, reparación, elevación o maniobra, no previstos en otro lugar B60S; frenos, sistemas de control de frenos o partes de estos sistemas B60T; vehículos de colchón de aire B60V; ciclos de motor, sus accesorios B62J, B62K; ensayo de vehículos G01M). › B62D 15/00 Direcciones no previstas en otro lugar. › Indicadores de dirección.
- G06Q10/00 FISICA. › G06 CALCULO; CONTEO. › G06Q METODOS O SISTEMAS DE PROCESAMIENTO DE DATOS ESPECIALMENTE ADAPTADOS PARA FINES ADMINISTRATIVOS, COMERCIALES, FINANCIEROS, DE GESTION, DE SUPERVISION O DE PRONOSTICO; METODOS O SISTEMAS ESPECIALMENTE ADAPTADOS PARA FINES ADMINISTRATIVOS, COMERCIALES, FINANCIEROS, DE GESTION, DE SUPERVISION O DE PRONOSTICO, NO PREVISTOS EN OTRO LUGAR. › Administración; Gestión.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia.
PDF original: ES-2357725_T3.pdf

Fragmento de la descripción:
La presente invención se refiere a ayudas a la conducción de un vehículo. Más concretamente, la presente invención se refiere a un dispositivo y a un método para proporcionar información de ayuda a la conducción de un vehículo.
Es bien conocido como proporcionar ayudas a la conducción de un vehículo, en particular para evitar colisiones, pero asimismo para ayudar a un conductor en el aparcamiento u otras maniobras. El sistema ABS (Sistema de Frenado Antibloqueo) se ha venido utilizando desde hace varios años y ayuda al frenado de un vehículo una vez iniciado por el conductor. El ABS evita patinazos, pero por lo demás no afecta a la trayectoria del vehículo.
La patente de los Estados Unidos US 7 016 783 da a conocer un método y un sistema para evitar colisiones utilizando frenado y dirección automatizados. En este sistema conocido, se utilizan umbrales de distancia para la toma de decisiones de control de la dirección. Dependiendo de la distancia relativa a un obstáculo, el sistema puede frenar y sortear un obstáculo. En base a los umbrales y a las distancias relativas medidas, el sistema conocido decide qué acción se toma entre un conjunto de acciones esencialmente predeterminadas, por ejemplo, un cambio de carril. La flexibilidad de este sistema conocido es, por consiguiente, limitada. Además, el sistema conocido pretende evitar colisiones pero falla en la reducción de los efectos de una colisión inevitable. Además, el sistema conocido ignora cualquier incomodidad que pudiera experimentar el conductor durante el frenado y/o el manejo del volante.
Constituye un objetivo de la presente invención el solucionar estos y otros problemas de la técnica anterior y dar a conocer un método genérico y un sistema para la ayuda a la conducción de un vehículo, que sea flexible y que permita tener en cuenta cualquier trayectoria del vehículo.
Constituye un objetivo adicional de la presente invención dar a conocer un método genérico y un sistema para la ayuda a la conducción de un vehículo que haga posible tener en cuenta cualquier incomodidad para el conductor.
En consecuencia, la presente invención da a conocer un dispositivo para proporcionar información para la ayuda a la conducción de un vehículo, comprendiendo el dispositivo:
- unidades sensoras para la recogida de datos referentes al vehículo y a su entorno,
- una unidad de procesamiento para:
determinar el coste de pares de valores de aceleración, en base a los datos del sensor, representando cada par de valores de aceleración una aceleración longitudinal y una aceleración transversal del vehículo,
seleccionar el par de valores de la aceleración de coste mínimo, y
proporcionar información para la ayuda a la conducción que incluya el par de valores de la aceleración de coste mínimo.
Mediante la determinación del coste de pares de valores de la aceleración y seleccionando el par de coste mínimo, puede seleccionarse una combinación óptima de aceleraciones longitudinales y transversales en cualquier circunstancia. Los datos del sensor pueden comprender datos indicativos de la distancia y de la velocidad (relativa u absoluta) de objetos tales como otros vehículos, y/o de datos indicativos de la anchura de la carretera y/o de obstáculos. Los datos del sensor pueden comprender asimismo datos indicativos de la temperatura del aire y/o de la temperatura de la carretera. La expresión “datos del sensor” significa además que abarca datos que pueden ser recuperados de un almacenamiento, tal como informaciones sobre la carretera e información técnica referente al vehículo.
La presente invención permite que cualesquiera datos de un sensor sean tenidos en cuenta y puedan ser utilizados para controlar un vehículo de forma manual y/o automática, más concretamente para evitar colisiones, maniobrar, control de carriles y otros objetivos para el control del vehículo.
La aceleración longitudinal puede ser positiva (aceleración real), negativa (deceleración)
o nula (sin cambio de velocidad). De manera similar, la aceleración transversal puede ser positiva (por ejemplo, hacia la izquierda), negativa (por ejemplo, hacia la derecha) o nula, preferentemente medida con respecto a la dirección actual de desplazamiento. Habitualmente, las aceleraciones están limitadas por restricciones físicas, tales como la aceleración longitudinal máxima posible (positiva) del vehículo, dada la potencia del motor, las condiciones de la carretera y el número de pasajeros. De manera similar, la aceleración transversal estará limitada por las condiciones de la carretera y las características del vehículo y de sus neumáticos.
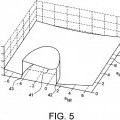
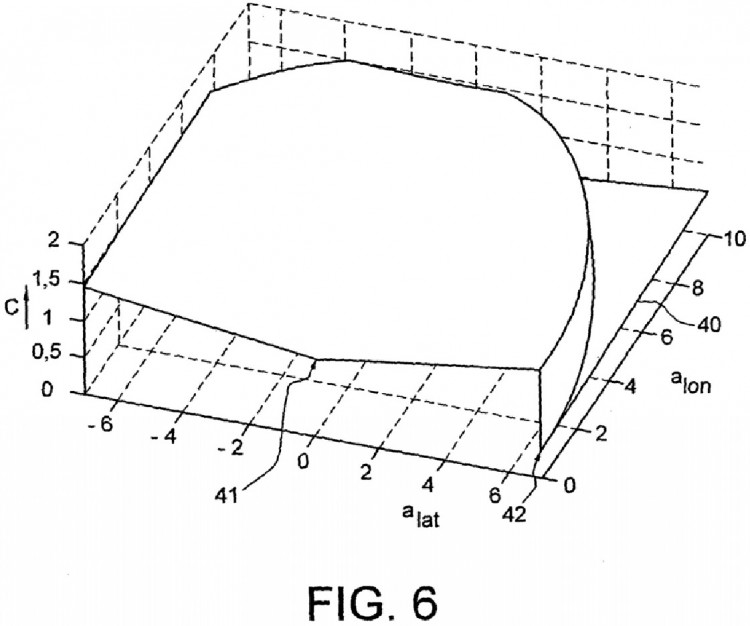
El coste asignado a un par de valores de la aceleración puede incluir el coste de la incomodidad para el conductor y para los pasajeros, el coste de una colisión y otros costes. Por consiguiente, la presente invención proporciona un método genérico y un dispositivo para el control del vehículo.
Según un aspecto adicional de la presente invención, las limitaciones físicas están expresadas asimismo como costes, asignando costes “infinitos” a unas aceleraciones físicamente imposibles.
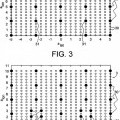
Es preferente que la unidad de procesamiento esté dispuesta para determinar el par de valores de la aceleración de coste mínimo, mediante la determinación del coste de un conjunto inicial de pares de valores de la aceleración, determinando el coste de los pares de su alrededor y seleccionando a continuación el par que tenga el coste menor. Este procedimiento de comparación del coste de un par con el coste de pares de su alrededor permite encontrar el par de coste mínimo.
En teoría, el número de pares diferentes de valores de la aceleración puede ser infinito. Para facilitar el proceso de optimización, es preferente limitar el número de pares. Esto puede realizarse cuando los valores de la aceleración tienen valores discontinuos. Es decir, solamente se tiene en cuenta un número limitado de valores discretos de la aceleración, ignorando cualesquiera valores intermedios. En consecuencia, puede utilizarse una parrilla de valores de la aceleración, estando determinada la finura de la parrilla mediante consideraciones prácticas, tales como la precisión requerida y la potencia de cálculo disponible.
La unidad de procesamiento puede utilizar cualquier par de valores de la aceleración como el par inicial. No obstante, es preferente que el conjunto inicial de pares esté predeterminado. Esto permite que la búsqueda del par de coste mínimo se inicie desde una posición ventajosa.
Tal como se ha mencionado anteriormente, la presente invención asigna costes a las aceleraciones. Esto puede conseguirse mediante la determinación de distancias a otros objetos en un punto futuro en el tiempo, supuesto un par de aceleraciones determinado. Mediante la asignación de costes a las aceleraciones en vez de, por ejemplo, trayectorias, se obtiene una conexión muy directa entre el par seleccionado de coste mínimo y el frenado deseado, la aceleración y/o el manejo del volante del vehículo. Además, se obtiene un modelo de cálculo relativamente sencillo, reduciendo de esta manera la carga de cálculo e incrementando la velocidad de procesamiento. Además, de un par de aceleraciones puede obtenerse fácilmente la comodidad o incomodidad del conductor.
El coste de cada par de valores de la aceleración puede ser determinado de formas diferentes. Es preferente que la unidad de procesamiento esté dispuesta para determinar el coste de un par mediante la ponderación de los datos del sensor. Esto es, los datos del sensor que representan información relativa a la distancia de los objetos, la velocidad (relativa) de los objetos y/o el tamaño de los objetos son ponderados de forma adecuada para obtener el coste de un par de valores de la aceleración. En consecuencia, la unidad de procesamiento puede estar dispuesta para determinar el coste de un par mediante la implicación de la posición y la velocidad relativa de otro objeto, la comodidad del conductor, la aparición de una colisión y/u otras características del vehículo.
El par de valores de aceleración escogido de coste mínimo, puede ser utilizado de diversas formas. Por ejemplo, la unidad de procesamiento puede estar dispuesta para proporcionar información de ayuda a la conducción visible, audible y/o háptica (táctil) al conductor del vehículo. Dicha información para la ayuda... [Seguir leyendo]
Reivindicaciones:
1. Sistema (1) para suministrar información para la ayuda a la conducción de un
vehículo (2), comprendiendo el sistema:
- unidades sensoras (10) para la recogida de datos de los sensores referentes al vehículo y a su entorno, y
- una unidad de procesamiento (11) para:
determinar el coste (C) de pares (30', 31, 32) de valores de la aceleración en base a los datos de los sensores, representando cada par de valores de la aceleración una aceleración longitudinal (alon) y una aceleración transversal (alat) del vehículo,
seleccionar un par de valores de la aceleración de coste mínimo, y para
suministrar información para la ayuda a la conducción que incluye el par de valores de la aceleración de coste mínimo.
2. Sistema, según la reivindicación 1, en el que la unidad de procesamiento (11) está dispuesta para determinar el par de valores de la aceleración de coste mínimo, mediante la determinación del coste de un conjunto inicial de pares de valores de la aceleración, determinando el coste de los pares circundantes y seleccionando a continuación el par que tenga el coste mínimo.
3. Sistema, según la reivindicación 1 ó 2, en el que el conjunto inicial de pares está predeterminado.
4. Sistema, según la reivindicación 1, 2 ó 3, en el que los valores de la aceleración tienen valores discontinuos.
5. Sistema, según cualquiera de las reivindicaciones anteriores, en el que la unidad de procesamiento (11) está dispuesta para determinar el coste de un par mediante la ponderación de los datos del sensor.
6. Sistema, según cualquiera de las reivindicaciones anteriores, en el que la unidad de procesamiento (11) está dispuesta para determinar el coste de un par al tener en cuenta la posición y la velocidad relativa de otro objeto, la comodidad del conductor, el que ocurra una colisión, y/o características del vehículo.
7. Sistema, según cualquiera de las reivindicaciones anteriores, en el que la unidad de procesamiento (11) está dispuesta para proporcionar al conductor del vehículo información visible, audible y/o háptica para la ayuda a la conducción.
8. Sistema, según cualquiera de las reivindicaciones anteriores, en el que la unidad de procesamiento (11) está acoplada a una unidad de dirección (13) con el objeto de proporcionar ayuda para el accionamiento del volante.
9. Sistema, según cualquiera de las reivindicaciones anteriores, en el que la unidad de procesamiento (11) está acoplada a una unidad de frenado (14) con el objeto de proporcionar ayuda para el frenado.
10. Unidad de procesamiento (11) para ser utilizada en un sistema, según cualquiera de las reivindicaciones 1 a 9.
11. Vehículo (2) que comprende un sistema (1), según cualquiera de las reivindicaciones 1 a 9.
12. Método para suministrar información para la ayuda a la conducción de un vehículo (2), que comprende unidades sensoras (10) para la recogida de datos de los sensores referentes al vehículo y a su entorno y una unidad de procesamiento (11) para procesar los datos de los sensores, comprendiendo el método las etapas de:
- determinar el coste de pares de valores de la aceleración en base a los datos de los sensores, representando cada par de valores de la aceleración una aceleración longitudinal y una aceleración transversal del vehículo,
- seleccionar el par de valores de la aceleración de coste mínimo, y
- suministrar información para la ayuda a la conducción, que incluye el par de valores de la aceleración de coste mínimo.
13. Método, según la reivindicación 12, en el que los valores de la aceleración tienen valores discontinuos.
14. Método, según la reivindicación 13, en el que el conjunto inicial de pares está predeterminado.
15. Producto consistente en un programa informático que comprende un programa de instrucciones que están configuradas para hacer que un ordenador programable lleve a cabo el método según cualquiera de las reivindicaciones 12 a 14, cuando sea ejecutado por medio del ordenador programable.
Patentes similares o relacionadas:
Aparato de control para un vehículo y método de control para un vehículo, del 19 de Junio de 2019, de TOYOTA JIDOSHA KABUSHIKI KAISHA: Un aparato de control para un vehículo , incluyendo el vehículo un motor de combustión , un primer motor eléctrico (MG1), un elemento rotativo […]
Aparato de control de frenado de un vehículo y método de control de frenado para el mismo, del 23 de Noviembre de 2018, de TOYOTA JIDOSHA KABUSHIKI KAISHA: Un aparato de control de frenado de un vehículo que lleva a cabo frenado por fricción, mediante un dispositivo de frenado por fricción, y frenado regenerativo, […]
Prueba de una función de control de la trayectoria de un vehículo con los frenos sin mando del volante, del 10 de Octubre de 2018, de PSA Automobiles SA: Procedimiento de prueba de una función de control de la trayectoria de un vehículo automóvil en ausencia de mando de la dirección de este vehículo, que utiliza un sistema […]
Procedimiento de control de la trayectoria de un vehículo con los frenos sin mando del volante de dirección, del 10 de Octubre de 2018, de PSA Automobiles SA: Procedimiento de control de la trayectoria de un vehículo automóvil en ausencia de mando del volante de dirección , que utiliza un sistema de […]
Sistema de control de conducción de seguridad y rescate para el cambio de radio de ruedas y el estallido de neumáticos en alta velocidad, del 11 de Octubre de 2017, de Wang, Dehong: Un sistema de control de conducción de seguridad y rescate para el cambio de radio de la rueda y el estallido de neumáticos en alta velocidad, que incluye: un […]
Control de vehículo por modulación de la inclinación, del 22 de Febrero de 2017, de DEKA PRODUCTS LIMITED PARTNERSHIP: Un método para la estabilización delantera-trasera de un vehículo para el movimiento en una dirección especificada sobre una superficie subyacente, el vehículo […]
Instalación de frenado electrohidráulica de vehículo y procedimiento para el manejo de la misma, del 4 de Enero de 2017, de LUCAS AUTOMOTIVE GMBH: Instalación de frenado electrohidráulica de vehículo de motor , comprendiendo un cilindro principal ; un actuador electromecánico para el accionamiento […]
Vehículo de motor y procedimiento para el control de un vehículo de motor, del 29 de Junio de 2016, de AUDI AG: Vehículo de motor que comprende al menos un sistema de asistencia al conductor para el cálculo previo de futuras situaciones de conducción […]