PROCEDIMIENTO PARA AUMENTAR LA DISPONIBILIDAD DE UNA POSICIÓN.
Un procedimiento de obtención de la posición de una estación móvil (2) que comprende:
(a) determinar (102) la posición de la estación móvil usando un primer esquema de determinación de la posición caracterizado porque el primer esquema de determinación de la posición se selecciona de esquemas de GPS basados en las estaciones móviles o autónomos; (b) determinar (104) si la posición de la estación móvil usando dicho primer esquema produce una posición aceptable; y (c) repetir la determinación (108; 114) de la posición de la estación móvil solo si el primer esquema no produce un resultado (104) de posición aceptable, usando al menos un esquema adicional de determinación de la posición diferente de dicho primer esquema en al menos algunas repeticiones hasta que (i) una repetición devuelva un resultado de posición aceptable (106; 112; 118) o (ii) se hayan usado todos los esquemas disponibles de determinación de la posición (120)
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E09152560.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 5775 MOREHOUSE DRIVE, R-132D SAN DIEGO, CA 92121-1714 ESTADOS UNIDOS DE AMERICA.
Inventor/es: KHUSHU,SANJEEV.
Fecha de Publicación: .
Fecha Solicitud PCT: 7 de Septiembre de 2005.
Clasificación Internacional de Patentes:
G01S5/02H1
H04Q7/38L
H04W64/00ELECTRICIDAD. › H04TECNICA DE LAS COMUNICACIONES ELECTRICAS. › H04W REDES DE COMUNICACION INALAMBRICAS (difusión H04H; sistemas de comunicación que utilizan enlaces inalámbricos para comunicación no selectiva, p. ej. extensiones inalámbricas H04M 1/72). › Localización de usuarios o terminales para propósitos de gestión de la red, p. ej. gestión de movilidad.
Clasificación PCT:
G01S5/14FISICA. › G01METROLOGIA; ENSAYOS. › G01SLOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 5/00 Establecimiento de la posición mediante la coordinación de dos o más determinaciones de dirección o de líneas de posición; Establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia. › Por determinación de distancias absolutas a una pluralidad de puntos espaciados de emplazamiento conocido.
H04W64/00H04W […] › Localización de usuarios o terminales para propósitos de gestión de la red, p. ej. gestión de movilidad.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Procedimiento para aumentar la disponibilidad de una posición Antecedentes E09152560 19-10-2011 La capacidad de localizar personas, vehículos y similares se ha cobrado importancia en años recientes, particularmente teniendo en cuenta las nuevas tecnologías que se están introduciendo y la creciente inquietud por la seguridad y la protección. Una persona o un vehículo pueden ser localizados determinando la ubicación de un dispositivo móvil de radio portado por la persona o por el vehículo. Por ejemplo, es deseable proporcionar un sistema de teléfono móvil con la capacidad de determinar la ubicación geográfica de un teléfono móvil individual usado para informar de una emergencia, para que tal ubicación pueda ser comunicada a personal de respuesta a emergencias, como la policía y servicios de bomberos y ambulancias. Hay disponibles varios esquemas para determinar la posición de una persona en la Tierra. Una forma de determinar la posición implica el uso del sistema de posicionamiento global (GPS). El GPS fue concebido y desarrollado en su origen por el Departamento de Defensa de EE. UU. como sistema de navegación militar. Con el tiempo, elementos del sistema se han hecho disponibles de forma creciente para el uso civil. El GPS usa una constelación de 24 satélites, en órbita geoestacionaria, con la que puede determinarse la posición cronometrando los viajes de las señales de los satélites desde un satélite de GPS a un receptor de GPS. Se proporcionan cinco satélites orbitales de repuesto fundamentalmente como sistema de respaldo en caso de que una de los 24 satélites falle. Los satélites transmiten señales de espectro de propagación en dos bandas de frecuencia: L1 (1575,42 MHz) y L2 (1223,6 MHz). Las señales son moduladas por dos códigos de ruido pseudoaleatorio: un código de adquisición grosera (C/A) y un código de precisión (P). El código de C/A en la banda L1 es el código pertinente a las aplicaciones civiles. Además, la señal de GPS es modulada con un mensaje de datos denominado comúnmente mensaje de navegación por GPS. Típicamente, un receptor de GPS emplea un esquema de triangulación para obtener una delimitación de la posición. Por ejemplo, puede obtenerse una posición derivada de GPS usando triangulación bidimensional. Por ejemplo, pueden usarse señales procedentes de tres satélites para determinar la posición en base a la intersección de tres círculos que se cruzan. Más específicamente, cada señal de los satélites puede proporcionar un radio en el que puede encontrarse el receptor de GPS. Dos radios que se crucen permiten que la determinación de la posición se estreche al área de intersección. Otra señal de satélite puede proporcionar un tercer radio indicativo de la posición del receptor de GPS, dado que los tres radios deberían cruzarse en un único punto. Expandiendo el concepto anterior a la triangulación tridimensional, la señal de cada satélite puede ser usada para indicar una esfera, con lo que pueden usarse tres esferas que se cruzan para determinar una posición que incluye información de la altitud. Pueden usarse señales de más satélites, y típicamente se usan para mejorar la precisión. En el receptor de GPS, la señal del satélite es desmodulada después de que es emparejada y sincronizada con un código de ruido pseudoaleatorio. El receptor de GPS usa el mensaje de navegación por GPS para calcular los tiempos de tránsito de la señal del satélite, además de las coordenadas del satélite de GPS. Típicamente, la medición de la posición por un receptor de GPS puede lograrse con una precisión de 15 metros. Sin embargo, la precisión de estos cálculos depende de la precisión de la medición y de la configuración de los satélites. Las condiciones atmosféricas pueden causar retardos ionosféricos. Además, las incertidumbres en las órbitas de los satélites pueden contribuir a la aparición de errores, dado que, axiomáticamente, las órbitas de los satélites se degradan con el tiempo. La dependencia de la indicación de la posición usando datos de GPS puede ser adicionalmente problemática en vista de las inquietudes por la seguridad pública en el entorno actual. Para abordar los problemas de la disponibilidad de las señales asociados con el GPS, a finales de la década de 1990 se introdujo el GPS asistido por servidor. Se proporcionan ordenadores servidores estacionarios con un receptor estacionario de GPS para recibir señales de los satélites de GPS. Los receptores estacionarios de GPS están asociados con una antena que tiene una visión completa del cielo para permitir una monitorización continua de las señales procedentes de todos los satélites de GPS visibles. Se proporciona una interfaz de radio con cada servidor para permitir la comunicación con estaciones móviles de GPS. En conexión con una consulta de posición relativa a la posición de la unidad móvil de GPS, el servidor transmite a la unidad móvil de GPS su información del satélite de GPS, obtenida de su receptor estacionario de GPS. Esta información incluye una lista de satélites de GPS observables y datos que permiten que el receptor de GPS sincronice y empareje códigos de ruido pseudoaleatorio con los códigos de los satélites de GPS. El receptor móvil de GPS transmite al servidor los datos de GPS que ha reunido. A su vez, el servidor calcula la posición del receptor móvil de GPS a partir de los datos proporcionados por el GPS móvil y el GPS estacionario. Aunque este esquema permite una mayor precisión con respecto al GPS no asistido por servidor, la disponibilidad de la señal de los satélites puede ser causando problemas en la adquisición de una posición precisa. El sistema de intensidad mejorada de la señal (ESS) emplea el esquema de localización de la posición que es independiente del GPS. Se reúne información tridimensional que cubre el terreno, incluyendo edificios, estructuras y otras obstrucciones, para modelar las características de propagación de la señal de radiofrecuencia para una antena inalámbrica transmisora en un área geográfica de interés. Los resultados del modelado se guardan en una base de datos. La posición de un localizador móvil se determina en conexión con la medición por parte del localizador de la 2 intensidad de señal de una señal procedente de varios transmisores inalámbricos. La posición es calculada por el sistema usando información de entrada procedente del localizador móvil e información guardada en la base de datos. Este sistema se ha usado en Japón en conexión con el Sistema de Microteléfonos Portátiles (PHS). Otros esquemas para la determinación de la posición sin usar el GPS hacen uso ya sea del ángulo de llegada (AOA) de las señales a los receptores o de la diferencia temporal en la llegada (TDOA) de las señales a los receptores. El esquema, basado en la red, del ángulo de llegada determina la ubicación de una estación móvil (como, por ejemplo, un teléfono móvil, una agenda electrónica con capacidad de comunicaciones inalámbricas, un ordenador portátil con capacidad de comunicaciones inalámbricas, un buscapersonas y otro dispositivo personal de comunicaciones) determinando el ángulo con el que llega una señal a dos o más sitios de antenas fijas. Por ejemplo, la dirección o el ángulo de llegada de una señal a cada sitio pueden determinarse a partir de la diferencia en el instante de llegada de las señales entrantes en diferentes elementos de una sola antena fija en ese lugar. Por ejemplo, puede usarse una antena direccional de dos elementos en fase para abarcar ángulos entre 60° y -60°. Una antena direccional de seis elementos en fase, que es equivalente a tres antes con 2 pares de elementos, puede abarcar 360°. El equipo dentro de la red de comunica ciones combina los datos angulares de múltiples sitios para determinar la ubicación de la estación móvil. La debida medición de ángulos y la relación geométrica entre la estación móvil y las antenas fijas pueden afectar a la medición de la posición. La proximidad de la estación móvil al punto central entre dos antenas fijas puede causar un error significativo en la medición de la posición. Por esta razón, resulta deseable usar tres o más sitios de antenas para realizar mediciones de AOA. El esquema de diferencia temporal de llegada para la determinación de la posición es otra solución basada en la red que mide la diferencia temporal de la llegada de una señal de radio a al menos dos sitios de antenas. Usando la velocidad de una onda electromagnética y tiempos conocidos y de transmisión y recepción, puede determinarse la distancia ente una antena fija y la estación móvil. La información procesada es traducida a lecturas de posición en longitud y latitud. La precisión de la información de temporización sincronizada necesaria para calcular debidamente la TDOA resulta... [Seguir leyendo]
Reivindicaciones:
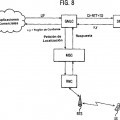
1. Un procedimiento de obtención de la posición de una estación móvil (2) que comprende: (a) determinar (102) la posición de la estación móvil usando un primer esquema de determinación de la posición caracterizado porque el primer esquema de determinación de la posición se selecciona de esquemas de GPS basados en las estaciones móviles o autónomos; (b) determinar (104) si la posición de la estación móvil usando dicho primer esquema produce una posición aceptable; y (c) repetir la determinación (108; 114) de la posición de la estación móvil solo si el primer esquema no produce un resultado (104) de posición aceptable, usando al menos un esquema adicional de determinación de la posición diferente de dicho primer esquema en al menos algunas repeticiones hasta que (i) una repetición devuelva un resultado de posición aceptable (106; 112; 118) o (ii) se hayan usado todos los esquemas disponibles de determinación de la posición (120). 2. El procedimiento de la reivindicación 1 en el que el al menos susodicho esquema adicional de determinación de la posición se selecciona de esquemas consistentes en triangulación, GPS asistido por servidor, intensidad mejorada de la señal, ángulo de llegada, diferencia temporal en la llegada, triangulación en el enlace de ida, triangulación avanzada en el enlace de ida, identificación de la huella digital y combinaciones de los mismos, diferente de dicho primer esquema en al menos algunas repeticiones. 3. El procedimiento de la reivindicación 1 en el que dicha estación móvil es un dispositivo de comunicaciones móviles seleccionado del grupo que consiste en un teléfono móvil, una agenda electrónica con capacidad de comunicaciones inalámbricas, un ordenador portátil con capacidad de comunicaciones inalámbricas, un buscapersonas y otros dispositivos personales de comunicaciones. 4. El procedimiento de la reivindicación 1 en el que el al menos susodicho esquema adicional de determinación de la posición es un esquema basado en la asistencia móvil. 5. El procedimiento de la reivindicación 1 que, además, comprende la decisión de si cada una de dichas determinaciones ha producido un resultado de posición aceptable. 6. El procedimiento de la reivindicación 5 que, además, comprende la deducción de una estimación del error asociado con cada resultado de posición, en el que dicha decisión de si cada determinación ha producido un resultado de posición aceptable incluye la comparación de una estimación del error asociado con tal resultado de posición con una tolerancia predeterminada. 7. El procedimiento de la reivindicación 6 en el que dicha tolerancia predeterminada es de +- 0,15240 metros. 8. El procedimiento de la reivindicación 6 en el que el al menos susodicho esquema adicional de determinación de la posición incluye la monitorización de una característica de señales transmitidas entre dicha estación móvil y una pluralidad de estaciones base, y dicha deducción de una estimación de error incluye determinar el número de estaciones base incluidas en dicha monitorización. 9. Un aparato (2) configurado para obtener la posición de una estación móvil que comprende: un medio (4, 10; 14) para determinar la posición de la estación móvil usando un primer esquema de determinación de la posición caracterizado porque el primer esquema de determinación de la posición se selecciona de esquemas de GPS basados en las estaciones móviles o autónomos; un medio (6; 40) para determinar (104) si la posición de la estación móvil usando dicho primer esquema produce una posición aceptable; y un medio (4, 6, 10; 14, 10) para repetir (108; 114) la determinación de la posición de la estación móvil solo si el primer esquema no produce un resultado (102) de posición aceptable, usando al menos un esquema adicional de determinación de la posición diferente de dicho primer esquema en al menos algunas repeticiones hasta que (i) una repetición devuelva un resultado de posición aceptable (106; 112; 118) o (ii) se hayan usado todos los esquemas disponibles de determinación de la posición (120). 10. El aparato de la reivindicación 9 en el que el al menos susodicho esquema adicional de determinación de la posición consiste en triangulación, GPS asistido por servidor, intensidad mejorada de la señal, ángulo de llegada, diferencia temporal en la llegada, triangulación en el enlace de ida, triangulación avanzada en el enlace de ida, identificación de la huella digital y combinaciones de los mismos, diferente de dicho primer esquema en al menos algunas repeticiones. 11. El aparato de la reivindicación 9 E09152560 19-10-2011 en el que el medio para determinar la posición de la estación móvil corresponde a un multiplexor (4) del modo de determinación de la posición en la estación móvil y en el que el medio para determinar si la posición de la estación móvil usando dicho primer esquema produce una posición aceptable corresponde a un procesador (6) en la estación móvil. 12. El aparato de la reivindicación 9 en el que el medio para determinar la posición de la estación móvil corresponde a una entidad de determinación de la posición en comunicación con una red, con la estación móvil o con ambos, y en el que el medio para determinar si la posición de la estación móvil usando dicho primer esquema produce una posición aceptable corresponde a un controlador en comunicación con dicha entidad de determinación de la posición. 11 E09152560 19-10-2011 12 E09152560 19-10-2011 13 E09152560 19-10-2011 14 E09152560 19-10-2011 E09152560 19-10-2011 16 E09152560 19-10-2011
Patentes similares o relacionadas:
CONTROL DE LOCALIZACIÓN EN UNA RED DE COMUNICACIONES MÓVILES, del 7 de Febrero de 2012, de TELEFONAKTIEBOLAGET LM ERICSSON (PUBL): Un método de determinación de la localización de una estación móvil dentro de una red de telecomunicación móvil que incluye los pasos de: […]
LOCALIZACIÓN DE TERMINALES MÓVILES, del 26 de Abril de 2011, de NOKIA CORPORATION: Un procedimiento de provisión de una estimación de localización particular para una estación móvil en una red de comunicaciones inalámbricas, comprendiendo el procedimiento: […]
EFICIENCIA MEJORADA DE MENSAJERÍA DE DATOS PARA UN SISTEMA DE DETERMINACIÓN ASISTIDA DE POSICIÓN INALÁMBRICA, del 21 de Enero de 2011, de QUALCOMM INCORPORATED: Un procedimiento para la información de mensajería basado en el posicionamiento en un sistema de determinación asistida de posición inalámbrica, comprendiendo el procedimiento: […]
ACTIVADORES AVANZADOS PARA APLICACIONES DE SERVICIOS EN BASE A LA LOCALIZACION EN UN SISTEMA DE LOCALIZACION INALAMBRICO, del 14 de Diciembre de 2010, de TRUEPOSITION, INC.: Un método para utilizar por un sistema de localización inalámbrica, WLS, para localizar un dispositivo inalámbrico que opera en un área geográfica […]
TRASPASO ACTIVADO POR POSICIONAMIENTO, del 27 de Octubre de 2010, de NOKIA CORPORATION: Un procedimiento para estimar la localización de un terminal que funciona en un sistema de comunicaciones que tiene al menos dos redes con […]
LOCALIZACION DE UN DISPOSITIVO INALAMBRICO BASANDOSE EN INFORMACION SOBRE ESTACIONES BASE PERTENECIENTES A UNA PLURALIDAD DE REDES, del 27 de Octubre de 2010, de QUALCOMM INCORPORATED: Un sistema para determinar una posición de un dispositivo inalámbrico, que comprende:
medios para determinar una ubicación general […]
CALIBRACION PARA SISTEMA DE LOCALIZACION INALAMBRICO, del 22 de Octubre de 2010, de TRUEPOSITION, INC.: Un método de calibración interna para un sistema receptor (S-22) en un sistema de localización inalámbrica, siendo operativo dicho sistema de localización […]
Virtualización de funciones de red en grupos a medida, del 17 de Junio de 2020, de TELEFONAKTIEBOLAGET LM ERICSSON (PUBL): Un método para virtualizar una función de red entre un grupo a medida que comprende una pluralidad de terminales móviles ubicados unos […]
Utilizamos cookies para mejorar nuestros servicios y mostrarle publicidad relevante. Si continua navegando, consideramos que acepta su uso. Puede obtener más información aquí. .
 LOCALIZACIÓN DE TERMINALES MÓVILES, del 26 de Abril de 2011, de NOKIA CORPORATION: Un procedimiento de provisión de una estimación de localización particular para una estación móvil en una red de comunicaciones inalámbricas, comprendiendo el procedimiento: […]
LOCALIZACIÓN DE TERMINALES MÓVILES, del 26 de Abril de 2011, de NOKIA CORPORATION: Un procedimiento de provisión de una estimación de localización particular para una estación móvil en una red de comunicaciones inalámbricas, comprendiendo el procedimiento: […]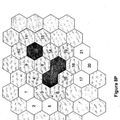 ACTIVADORES AVANZADOS PARA APLICACIONES DE SERVICIOS EN BASE A LA LOCALIZACION EN UN SISTEMA DE LOCALIZACION INALAMBRICO, del 14 de Diciembre de 2010, de TRUEPOSITION, INC.: Un método para utilizar por un sistema de localización inalámbrica, WLS, para localizar un dispositivo inalámbrico que opera en un área geográfica […]
ACTIVADORES AVANZADOS PARA APLICACIONES DE SERVICIOS EN BASE A LA LOCALIZACION EN UN SISTEMA DE LOCALIZACION INALAMBRICO, del 14 de Diciembre de 2010, de TRUEPOSITION, INC.: Un método para utilizar por un sistema de localización inalámbrica, WLS, para localizar un dispositivo inalámbrico que opera en un área geográfica […] TRASPASO ACTIVADO POR POSICIONAMIENTO, del 27 de Octubre de 2010, de NOKIA CORPORATION: Un procedimiento para estimar la localización de un terminal que funciona en un sistema de comunicaciones que tiene al menos dos redes con […]
TRASPASO ACTIVADO POR POSICIONAMIENTO, del 27 de Octubre de 2010, de NOKIA CORPORATION: Un procedimiento para estimar la localización de un terminal que funciona en un sistema de comunicaciones que tiene al menos dos redes con […] LOCALIZACION DE UN DISPOSITIVO INALAMBRICO BASANDOSE EN INFORMACION SOBRE ESTACIONES BASE PERTENECIENTES A UNA PLURALIDAD DE REDES, del 27 de Octubre de 2010, de QUALCOMM INCORPORATED: Un sistema para determinar una posición de un dispositivo inalámbrico, que comprende:
medios para determinar una ubicación general […]
LOCALIZACION DE UN DISPOSITIVO INALAMBRICO BASANDOSE EN INFORMACION SOBRE ESTACIONES BASE PERTENECIENTES A UNA PLURALIDAD DE REDES, del 27 de Octubre de 2010, de QUALCOMM INCORPORATED: Un sistema para determinar una posición de un dispositivo inalámbrico, que comprende:
medios para determinar una ubicación general […] CALIBRACION PARA SISTEMA DE LOCALIZACION INALAMBRICO, del 22 de Octubre de 2010, de TRUEPOSITION, INC.: Un método de calibración interna para un sistema receptor (S-22) en un sistema de localización inalámbrica, siendo operativo dicho sistema de localización […]
CALIBRACION PARA SISTEMA DE LOCALIZACION INALAMBRICO, del 22 de Octubre de 2010, de TRUEPOSITION, INC.: Un método de calibración interna para un sistema receptor (S-22) en un sistema de localización inalámbrica, siendo operativo dicho sistema de localización […]