ACTUADOR GIRATORIO.
Actuador giratorio con un eje de mando (3) fijado con libertad de giro y con un botón giratorio (1) unido a éste,
así como con un dispositivo para generar una percepción áptica cuando gira el botón giratorio (1), estando configurado este dispositivo en forma de un enclavamiento mecánico comprendiendo una leva de enclavamiento (6) y por lo menos un perno de enclavamiento (5, 5') que ataca contra la leva de enclavamiento, caracterizado porque el dispositivo generador de percepción áptica tiene asociado un dispositivo accionador arrastrado por un motor eléctrico (8), mediante el cual el dispositivo generador de percepción áptica incluyendo el botón giratorio (1) unido con aquél a través del eje de mando (3), gira cuando funciona el motor eléctrico (8)
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2005/010630.
Solicitante: LEOPOLD KOSTAL GMBH & CO. KG.
Nacionalidad solicitante: Alemania.
Dirección: WIESENSTRASSE 47 58507 LÜDENSCHEID ALEMANIA.
Inventor/es: KOSSAKOWSKI, THOMAS, JANNASCH,Hendrik.
Fecha de Publicación: .
Fecha Solicitud PCT: 1 de Octubre de 2005.
Clasificación PCT:
- G01D11/16 FISICA. › G01 METROLOGIA; ENSAYOS. › G01D MEDIDAS NO ESPECIALMENTE ADAPTADAS A UNA VARIABLE PARTICULAR; DISPOSICIONES PARA LA MEDIDA DE DOS O MAS VARIABLES NO CUBIERTAS POR OTRA UNICA SUBCLASE; APARATOS CONTADORES DE TARIFA; DISPOSICIONES PARA TRANSFERENCIA O TRANSDUCTORES NO ESPECIALMENTE ADAPTADAS A UNA VARIABLE PARTICULAR; MEDIDAS O ENSAYOS NO PREVISTOS EN OTRO LUGAR. › G01D 11/00 Partes constitutivas de las disposiciones para la medida no específicamente adaptadas a una variable en particular (G01D 13/00, G01D 15/00 tienen prioridad). › Elementos para limitar o impedir el movimiento de las piezas, p. ej. para la puesta a cero (inmovilización de piezas móviles cuando no se usen G01D 11/20).
- G05G5/06 G […] › G05 CONTROL; REGULACION. › G05G DISPOSITIVOS O SISTEMAS DE CONTROL EN LA MEDIDA EN QUE SUS CARACTERISTICAS SON UNICAMENTE MECANICAS ("mecanismos "Bowden" o similares F16C 1/10; engranajes o mecanismos no especializados con este fin F16H; mecanismos de cambio de velocidad o de inversión para transmisiones que transmiten movimientos rotativos F16H 59/00 - F16H 63/00). › G05G 5/00 Medios para impedir, limitar o invertir el movimiento de ciertas piezas de un mecanismo de control, p. ej. cierre de los órganos de control (G05G 17/00 tiene prioridad). › para mantener los órganos de control, solamente sobre una o sobre un número limitado de posiciones definidas (G05G 5/03, G05G 5/05, G05G 5/28 tienen prioridad).
- H01H3/22 ELECTRICIDAD. › H01 ELEMENTOS ELECTRICOS BASICOS. › H01H INTERRUPTORES ELECTRICOS; RELES; SELECTORES; DISPOSITIVOS DE PROTECCION DE EMERGENCIA (cables de contacto H01B 7/10; interruptores automáticos de tipo electrolítico H01G 9/18; circuitos de protección, de seguridad H02H; conmutación por medios electrónicos sin cierre de contactos H03K 17/00). › H01H 3/00 Mecanismos para accionar los contactos (medios de accionamiento o de puesta en movimiento térmicos H01H 37/02). › Disposiciones para conducir una energía al interior del interruptor para accionar el mecanismo de arrastre.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia.
PDF original: ES-2365244_T3.pdf
Fragmento de la descripción:
La invención se refiere a un actuador giratorio con un eje de mando fijado con libertad de giro y con un botón giratorio unido a éste, así como con un dispositivo para generar una percepción áptica cuando gira el botón giratorio, estando configurado este dispositivo en forma de un enclavamiento mecánico comprendiendo una leva de enclavamiento y por lo menos un perno de enclavamiento que ataca contra la leva de enclavamiento.
Los actuadores giratorios se utilizan por ejemplo en dispositivos para la entrada de datos en los que mediante el giro del actuador giratorio o en su caso mediante una pulsación o una inclinación, se controla un cursor en distinto planos de un menú. Un actuador giratorio de este tipo puede ser por ejemplo parte de un llamado joystick. Se conoce un actuador giratorio de este tipo por el documento DE 197 12 049 A1. En este actuador giratorio conocido, un dispositivo generador de percepción áptica está unido con el eje de mando. Este dispositivo consiste en un motor eléctrico que activado de forma correspondiente ejerce sobre el eje de mando un par de fuerzas opuesto al movimiento de giro. En función del mando o de la activación del motor eléctrico y en función de la intensidad de corriente en el motor, así como de la posición angular actual del eje de mando, se pueden obtener distintas percepciones ápticas. A diferencia de los dispositivos generadores de percepción áptica configurados como un enclavamiento mecánico, en estos actuadores giratorios se encuentra el inconveniente de que la posición cero del actuador giratorio es relativamente blanda y que como consecuencia de la necesaria aplicación de un par de fuerzas opuesto mediante el motor eléctrico, cuando se gira la palanca se percibe una vibración del control.
Por el documento DE 100 41 935 A1 se ha conocido un actuador giratorio en el que se disponen varias levas de enclavamiento anulares dispuestas unas sobre otras que son activables para obtener distintas percepciones ápticas mediante anillas de bloqueo accionadas electrómagnéticamente. Con este dispositivo se eliminan las desventajas mencionadas anteriormente sobre el carácter oscilante de la percepción áptica generada mediante un motor eléctrico.
El actuador giratorio según la presente invención tiene la ventaja respecto del estado de la técnica descrito de que por un lado tiene la percepción áptica distintiva de los dispositivos de enclavamiento mecánicos, pero por otro lado a la vez permite el movimiento del botón giratorio sin necesidad de accionarlo manualmente.
Según la invención esto es posible gracias a que el dispositivo generador de percepción áptica tiene asociado un dispositivo accionador arrastrado por un motor eléctrico mediante el cual el dispositivo generador de percepción áptica incluyendo el botón giratorio unido con aquél a través del eje de mando, gira cuando funciona el motor eléctrico. El accionador giratorio según la invención se basa en los actuadores giratorios cuyo dispositivo generador de percepción áptica están configurados como un enclavamiento mecánico mediante el cual se obtiene una percepción áptica precisa predeterminada. Pero aquí simultáneamente puede girar el conjunto del dispositivo generador de percepción áptica que está fijado a la carcasa con libertad de giro y se le puede hacer girar alrededor del eje de mando mediante un motor eléctrico sin necesidad de intervención manual.
En un ejemplo de realización preferido se prevé que la leva de enclavamiento esté dispuesta en la cara interior de un cuerpo anular que rodea al eje de mando concéntricamente, el cual a su vez tiene en su cara exterior un dentado exterior en toda su periferia mediante el cual y a través de un sistema de engranajes está unido al motor eléctrico.
En otro desarrollo de la invención se prevé que un dispositivo medidor de ángulo se encuentre dentro de la carcasa y mediante el cual se puede determinar la posición angular exacta del eje de mando.
A continuación se explica la invención mediante un ejemplo de realización haciendo referencia a las figuras que acompañan. Las figuras muestran:
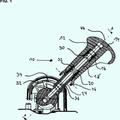
La Fig. 1, una representación tridimensional de un actuador giratorio según la invención.
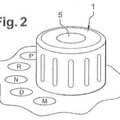
La Fig. 2, una sección longitudinal a través del actuador giratorio de la Fig. 1.
El actuador giratorio mostrado en la figura, excepto el botón giratorio 1 previsto para el manejo manual, está alojado en una carcasa 2 que en la Fig. 1 está representada parcialmente abierta. Un eje de mando 3 fijado en la carcasa 2 con libertad de giro atraviesa la carcasa 2 por su parte superior y une el botón giratorio 1 con un dispositivo generador de percepción áptica, el cual está realizado a modo de enclavamiento mecánico y que esencialmente comprende una leva de enclavamiento 6 en forma de anilla así como dos pernos de enclavamiento 5, 5' empujados por un muelle que atacan sobre aquella. Los dos pernos de enclavamiento 5, 5' están dispuestos uno contra el otro apoyados entre sí a través de un muelle de compresión 4, en un alojamiento tubular unido al eje de mando 3 y dispuesto perpendicular a su eje de giro. La leva de enclavamiento 6 está formada sobre la cara interior de un cuerpo anular 7 el cual está fijado en la carcasa 2 con libertad de giro alrededor de un eje que coincide con el jeje de giro del eje de mando 3. Además de la leva de enclavamiento 6 de la cara interior, el cuerpo anular 7 soporta por su cara exterior un dentado 7' en toda su periferia. A través de este dentado exterior periférico 7', el cuerpo anular 7 y con él el conjunto del dispositivo generador de percepción áptica, está unido a través de unos engranajes a un motor eléctrico 8 dispuesto en la parte baja de la carcasa 2. Para este fin el eje del motor eléctrico 8 está provisto de un tornillo sinfín 9 que ataca una rueda de dentado inclinado 10. La rueda de dentado inclinado 10 está fijada con libertad de giro alrededor de un eje 11 paralelo al eje del cuerpo anular 7, y gira unida solidariamente con una rueda de dentado recto 12 de menor diámetro dispuesta sobre ella, y ésta rueda de dentado recto 12 ataca a su vez el dentado recto exterior 7' del cuerpo anular 7.
Cuando el motor eléctrico 8 está en reposo, el giro del cuerpo anular 7 está bloqueado por el autoenclavamiento de los engranajes descritos, es decir el cuerpo anular 7 y con él la leva de enclavamiento 6 están fijos en su posición. El giro del botón giratorio 1 accionado manualmente es posible superando la fuerza de enclavamiento del dispositivo generador de percepción áptica proporcionada por la interacción entre los pernos de enclavamiento 5, 5' con la leva de enclavamiento 6. Pero también es posible mover a otra posición el botón giratorio sin intervención manual, solamente mediante el funcionamiento del motor eléctrico 8. El giro del eje del motor se convierte a través de los engranajes en giro del cuerpo anular 7. Puesto que la fuerza que actúa entre la leva de enclavamiento 6 en el interior del cuerpo anular 7 y los pernos de enclavamiento 5, 5' es claramente mayor que las fuerzas que actúan normalmente sobre el eje de mando 3 y que esencialmente están generadas por rozamientos de los soportes, a través del movimiento del dispositivo generador de percepción áptica se mueve también el botón giratorio 1. En el caso de que el botón giratorio 1 fuera bloqueado, por ejemplo porque el usuario lo sujeta mientras el eje de mando está siendo accionado por el motor, entonces el enclavamiento mecánico actúa como un embrague de seguridad. El cuerpo anular 7 con la leva de enclavamiento 6 gira por la acción del motor eléctrico 8 entre posiciones de enclavamiento vecinas respecto al eje de mando 3 bloqueado y respecto a los pernos de enclavamiento 5, 5' unidos a éste, de modo que simultáneamente se obtiene una protección contra un daño accidental del dispositivo. Con el fin de limitar el giro posible del botón giratorio 1 dentro de un sector angular, el eje de mando 3 dispone de una leva tope 3' en una zona de su periferia, la cual entra en contacto con topes correspondientes situados en la carcasa 2 en las posiciones extremas del sector angular previsto.
En la carcasa 2 se encuentra un dispositivo de control electrónico para el control del actuador giratorio, el cual está realizado sobre una placa de circuito impreso 13 dispuesta por encima del dispositivo generador de percepción áptica y rodeando por lo menos en parte al eje de mando 3. Asimismo sobre esta placa de circuito impreso 13 se encuentran los elementos captadores fijos de un dispositivo medidor de ángulo para captar la posición angular... [Seguir leyendo]
Reivindicaciones:
1. Actuador giratorio con un eje de mando (3) fijado con libertad de giro y con un botón giratorio (1) unido a éste, así como con un dispositivo para generar una percepción áptica cuando gira el botón giratorio (1), estando configurado este dispositivo en forma de un enclavamiento mecánico comprendiendo una leva de enclavamiento (6) y por lo menos un perno de enclavamiento (5, 5') que ataca contra la leva de enclavamiento, caracterizado porque el dispositivo generador de percepción áptica tiene asociado un dispositivo accionador arrastrado por un motor eléctrico (8), mediante el cual el dispositivo generador de percepción áptica incluyendo el botón giratorio (1) unido con aquél a través del eje de mando (3), gira cuando funciona el motor eléctrico (8).
2. Actuador giratorio según la reivindicación 1, caracterizado porque la leva de enclavamiento (6) está dispuesta en la cara interior de un cuerpo anular (7) que rodea concéntricamente al eje de mando (3), dicho cuerpo anular (7) está unido por su cara exterior al dispositivo accionador.
3. Actuador giratorio según la reivindicación 2, caracterizado porque el cuerpo anular (7) tiene en su cara exterior un dentado exterior (7') en toda su periferia mediante el cual y a través de un sistema de engranajes está unido al motor eléctrico (8).
4. Actuador giratorio según las reivindicaciones de la 1 a la 3, caracterizado porque el eje de mando (3) dispone de una leva tope (3') en una zona de su periferia, la cual entra en contacto con topes correspondientes situados en la carcasa (2) en las posiciones extremas del sector angular previsto.
5. Actuador giratorio según las reivindicaciones de la 1 a la 4, caracterizado porque en la carcasa (2) se encuentra un dispositivo de control electrónico para el control del actuador giratorio, el cual está realizado sobre una placa de circuito impreso (13) dispuesta por encima del dispositivo generador de percepción áptica y rodeando por lo menos en parte al eje de mando (3).
6. Actuador giratorio según las reivindicaciones de la 1 a la 5, caracterizado porque dentro de la carcasa (2) se encuentra un dispositivo medidor de ángulo para determinar la posición angular exacta del eje de mando (3).
7. Actuador giratorio según la reivindicación 6, caracterizado porque el dispositivo medidor de ángulo comprende elementos captadores fijos dispuestos sobre la placa de circuito impreso (13), así como elementos iniciadores (14) unidos solidariamente al giro con el eje de mando (3) y que giran con éste respecto a la placa de circuito impreso
(13) fija.
Patentes similares o relacionadas:
Dispositivo de encastre para un elemento de mando que puede moverse en rotación o en traslación, del 2 de Agosto de 2017, de BEHR-HELLA THERMOCONTROL GMBH: Dispositivo de encastre para un elemento de mando que puede moverse en rotación o en traslación, con - un saliente de encastre (32, 32') montado con elasticidad […]
Dispositivo para bloquear un elemento de mando de una caja de cambios automática de un vehículo, procedimiento para hacer funcionar un dispositivo de este tipo y dispositivo de conmutación para conmutar una caja de cambios automática de un vehículo, del 24 de Agosto de 2016, de ZF FRIEDRICHSHAFEN AG: Dispositivo para bloquear un elemento de mando de una caja de cambios automática de un vehículo , presentando el dispositivo las siguientes […]
 Dispositivo de palanca para una válvula de frenado manual de un sistema de frenado, del 14 de Enero de 2016, de KNORR-BREMSE SYSTEME FUR NUTZFAHRZEUGE GMBH: Dispositivo de palanca , en particular dispositivo de palanca para una válvula de frenado manual de un sistema de frenado, con una […]
Dispositivo de palanca para una válvula de frenado manual de un sistema de frenado, del 14 de Enero de 2016, de KNORR-BREMSE SYSTEME FUR NUTZFAHRZEUGE GMBH: Dispositivo de palanca , en particular dispositivo de palanca para una válvula de frenado manual de un sistema de frenado, con una […]
Disposición de mando de aparato doméstico, válvula de gas, y cocina, del 29 de Diciembre de 2015, de BSH ELECTRODOMESTICOS ESPAÑA S.A.: Disposición de mando de aparato doméstico, válvula de gas, y cocina. La invención hace referencia a una disposición de mando de aparato doméstico con un eje de […]
 Cambio modular de transmisión automática, del 25 de Febrero de 2013, de DURA GLOBAL TECHNOLOGIES, INC.: Un mecanismo de cambio que comprende, en combinación:
un conjunto de palanca de cambio que incluye un alojamiento ;
un conjunto […]
Cambio modular de transmisión automática, del 25 de Febrero de 2013, de DURA GLOBAL TECHNOLOGIES, INC.: Un mecanismo de cambio que comprende, en combinación:
un conjunto de palanca de cambio que incluye un alojamiento ;
un conjunto […]
 Dispositivo de mando de una caja de velocidades de un vehículo automóvil, controlado por un ordenador, del 10 de Mayo de 2012, de DURA AUTOMOTIVE SYSTEMS SAS: Dispositivo de control de una caja de velocidades de un vehículo automóvil asociada a un ordenador que tiene, en modalidad de funcionamiento automático […]
Dispositivo de mando de una caja de velocidades de un vehículo automóvil, controlado por un ordenador, del 10 de Mayo de 2012, de DURA AUTOMOTIVE SYSTEMS SAS: Dispositivo de control de una caja de velocidades de un vehículo automóvil asociada a un ordenador que tiene, en modalidad de funcionamiento automático […]
PALANCA DE CONTROL ELÉCTRICA, del 18 de Noviembre de 2011, de MARQUARDT GMBH: Conmutador eléctrico, en particular en forma de un conmutador de cursor o de joystick, con un elemento de accionamiento , con medios de pivote , con […]
APARATO DE DIRECCIÓN INCLINABLE, del 20 de Septiembre de 2011, de YAMADA MANUFACTURING CO., LTD.: Un aparato de dirección inclinable, incluyendo un mecanismo de regulación de inclinación en el que se establece un estado de liberación de bloqueo de inclinación […]