PROCEDIMIENTO Y DISPOSITIVO PARA LA PREPARACION DE UN IMPLANTE A PARTIR DE UN MATERIAL DE IMPLANTE.
Procedimiento para la preparación de un implante (58) destinado a rellenar un defecto (20) en un cuerpo humano o animal a base de un material de implante (54),
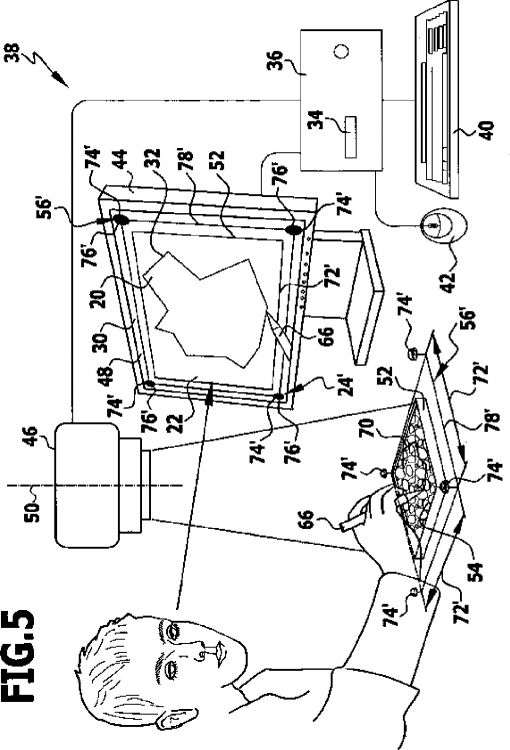
en el cual se facilita una imagen (30) del defecto (20) que presenta un contorno de defecto (32), sobre el cual está representado un primer cuerpo de calibrado (24) dispuesto en o junto al defecto (20), donde sobre el material de implante (54) que se trata de mecanizar o junto a éste se dispone un segundo cuerpo de calibrado (56) que se corresponde con el primer cuerpo de calibrado (24), efectuándose una toma de imagen en tiempo real (48) del material de implante (54) y representándolo en tiempo real sobre un dispositivo visualizador (44), representándose la imagen del defecto (30) obtenida sobre el dispositivo visualizador (44) superponiéndolo con la imagen en tiempo real (48) de tal modo que el primer y el segundo cuerpo de calibrado (24, 56) se representen superpuestos con igual forma y tamaño, y donde se representa en el dispositivo de visualización (44) una herramienta de mecanizado (66) en la imagen en tiempo real (48) que se desplaza de tal modo sobre el material de implante (54) que en el dispositivo de visualización (44) siga el contorno del defecto (32) representado en la imagen del defecto (30)
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2006/068861.
Solicitante: AESCULAP AG.
Nacionalidad solicitante: Alemania.
Dirección: AM AESCULAP-PLATZ,78532 TUTTLINGEN.
Inventor/es: LEITNER, FRANCOIS.
Fecha de Publicación: .
Fecha Concesión Europea: 20 de Enero de 2010.
Clasificación Internacional de Patentes:
- A61B1/317 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61B DIAGNOSTICO; CIRUGIA; IDENTIFICACION (análisis de material biológico G01N, p.ej. G01N 33/48). › A61B 1/00 Instrumentos para proceder al examen médico de las cavidades o conductos del cuerpo por inspección visual o fotográfica, p. ej. endoscopios (examen de las cavidades o conductos del cuerpo utilizando ondas ultrasónicas, sónicas o infrasónicas A61B 8/12; instrumentos endoscópicos para la toma de muestras celulares o para biopsias A61B 10/04; con fines quirúrgicos A61B 17/00; instrumentos quirúrgicos endoscópicos A61B 17/94; instrumentos quirúrgicos que utilizan un haz láser dirigido a lo largo o a través de un conducto flexible A61B 18/22 ); Dispositivos de iluminación al efecto (para los ojos A61B 3/00). › para los huesos o articulaciones, p. ej. osteoscopios, artroscopios.
- A61F2/30C
- A61F2/30M2
Clasificación PCT:
- A61B19/00
- A61F2/30 A61 […] › A61F FILTROS IMPLANTABLES EN LOS VASOS SANGUINEOS; PROTESIS; DISPOSITIVOS QUE MANTIENEN LA LUZ O QUE EVITAN EL COLAPSO DE ESTRUCTURAS TUBULARES, p. ej. STENTS; DISPOSITIVOS DE ORTOPEDIA, CURA O PARA LA CONTRACEPCION; FOMENTACION; TRATAMIENTO O PROTECCION DE OJOS Y OIDOS; VENDAJES, APOSITOS O COMPRESAS ABSORBENTES; BOTIQUINES DE PRIMEROS AUXILIOS (prótesis dentales A61C). › A61F 2/00 Filtros implantables en los vasos sanguíneos; Prótesis, es decir, elementos de sustitución o de reemplazo para partes del cuerpo; Dispositivos para unirlas al cuerpo; Dispositivos para proporcionar permeabilidad o para evitar que colapsen las estructuras tubulares del cuerpo, p. ej. stents (como artículos cosméticos, ver las subclases apropiadas, p. ej. pelucas o postizos, A41G 3/00, A41G 5/00, uñas artificiales A45D 31/00; prótesis dentales A61C 13/00; materiales para prótesis A61L 27/00; riñones artificiales A61M 1/14; corazones artificiales A61M 60/00). › Articulaciones.
Fragmento de la descripción:
Procedimiento y dispositivo para la preparación de un implante a partir de un material de implante.
La presente invención se refiere a un procedimiento para preparar un implante destinado a rellenar un defecto en un cuerpo humano o animal a base de un material de implante. La presente invención también se refiere a un dispositivo para preparar un implante destinado a rellenar un defecto en un cuerpo humano o animal a base de un material de implante.
El documento US 2003/055502 A1 es el que representa el estado de la técnica más próximo. Da a conocer un procedimiento para preparar un implante destinado a rellenar un defecto en un cuerpo humano o animal a base de un material de implante en el que se facilita una imagen del defecto de un defecto que presenta un contorno del defecto. Estos datos se transmiten a una herramienta de mecanizado que se desplaza sobre el material de implante de modo que siga el contorno del defecto.
Por ejemplo para el tratamiento de defectos de cartílagos surgidos por lesiones se requieren implantes que se correspondan exactamente en cuanto a forma y tamaño con el defecto. Esta clase de implantes comprenden por ejemplo un soporte que se puede inocular con células de cartílago del propio cuerpo del paciente. Un procedimiento de la clase descrita anteriormente se describe por ejemplo en el modelo de utilidad alemán 20 2005 005 085. Ahora bien para realizar el procedimiento conocido se requiere un sistema de navegación con cuya ayuda se determina con un instrumento palpador navegado el contorno del defecto que se ha de tratar. Este procedimiento es complejo y no se puede llevar a cabo si no se dispone de un sistema de navegación.
Constituye por lo tanto el objetivo de la presente invención mejorar un procedimiento y un dispositivo para la preparación de un implante destinado a rellenar un defecto en un cuerpo humano o animal a base de un material de implante, que permita preparar el implante de forma sencilla y ajustado con precisión con el defecto.
Este objetivo se resuelve en un procedimiento de la clase descrita inicialmente conforme a la invención por facilitar una imagen del defecto correspondiente al defecto que presenta un contorno del defecto en el que está representado un primer cuerpo de calibrado situado en o contiguo al defecto, porque sobre el material de implante o contiguo al material de implante que se trata de mecanizar se dispone un segundo cuerpo de calibrado que se corresponde con el primer cuerpo de calibrado, porque se toma una imagen del material de implante en tiempo real y se representa en tiempo real sobre un dispositivo de visualización, porque la imagen del defecto facilitada se representa en el dispositivo de visualización y se superpone a la imagen en tiempo real de tal modo que el primer y el segundo cuerpo de calibrado se representen superpuestos con igualdad de forma y tamaño, y porque una herramienta de mecanizado está representada en imagen en tiempo real sobre el dispositivo de visualización, y se mueve de tal modo sobre el material de implante que sobre el dispositivo de visualización siga el contorno de defecto representado en la imagen del defecto.
Por la superposición de la imagen en tiempo real y de la imagen del defecto, de tal modo que el primer y el segundo cuerpo de calibrado se representen superpuestos con igualdad de forma y tamaño, el defecto representado en el dispositivo de visualización se corresponde tanto en cuanto a su forma como también en su tamaño al implante que se ha de preparar a partir del material de implante. Si se desplaza la herramienta de mecanizado sobre el material de implante de tal modo que en el dispositivo de visualización siga el contorno del defecto representado en la imagen del defecto, se puede preparar el implante deseado a partir del material de implante exactamente con el tamaño y forma que corresponda al defecto. La ventaja de este procedimiento está principalmente en que no requiere un sistema de navegación. Por otra parte tampoco hay que disponer de una imagen en tiempo real del defecto. Esto significa que el procedimiento no tiene que llevarse a cabo en un quirófano ni por parte de un médico. Sin embargo es excelentemente apropiado para realizarlo también en un quirófano, ya que requiere únicamente un dispositivo generador de imagen para generar la imagen en tiempo real así como un dispositivo visualizador, que se pueden introducir sin problemas en una zona estéril. En cambio no se requiere precisamente introducir un proyector en la zona estéril, mediante el cual se pueda transmitir un contorno del defecto sobre el material de implante que se trata de mecanizar. Debe entenderse como cuerpo de calibrado también una estructura de calibrado que esté formada por varias partes que se encuentren en una relación fija entre sí. Por otra parte, el primer cuerpo de calibrado también puede ser un cuerpo de calibrado virtual, es decir una estructura de calibrado superpuesta a la imagen del defecto o un cuerpo de calibrado que se corresponda con el segundo cuerpo de calibrado.
Ventajosamente se prepara un implante de forma laminar a partir de un material de implante esencialmente plano. De este modo se pueden preparar en la forma deseada tanto defectos de cartílagos como también implantes de piel o similares. El procedimiento por lo tanto es adecuado para la preparación de toda clase de implantes que sean adecuados para rellenar un defecto en el cuerpo.
Es ventajoso que para tomar la imagen en tiempo real se emplee un primer dispositivo generador de imagen con un primer eje óptico que se orienta con un primer ángulo de imagen con relación a un plano definido por el material de implante, si se prepara una imagen del defecto que se tomó con un segundo dispositivo generador de imagen que presente un segundo eje óptico, donde el segundo eje óptico estaba orientado con relación a un plano definido por el defecto con un segundo ángulo de imagen, y si el primer ángulo de imagen se ajusta de acuerdo con el segundo ángulo de imagen. De este modo se puede asegurar que tanto el defecto en la imagen del defecto como también el material de implante en la imagen en tiempo real se representan sobre el dispositivo de visualización bajo un mismo ángulo. De este modo se evitan errores de distorsión en la representación de las dos imágenes superpuestas en el dispositivo de visualización y se asegura que incluso con una representación distorsionada del defecto y del material de implante, el implante que se trata de preparar rellenará exactamente el defecto.
Con el fin de evitar distorsiones en la representación tanto del defecto como del material de implante es conveniente que el segundo eje óptico esté orientado en dirección perpendicular o esencialmente perpendicular al plano definido por el defecto, y que el primer eje óptico se oriente en dirección perpendicular o esencialmente perpendicular al plano definido por el material de implante.
De acuerdo con una variante preferida del procedimiento conforme a la invención puede estar previsto que se facilite una imagen del defecto que se haya tomado mediante palpado del contorno del defecto utilizando un instrumento de palpado navegado. Una imagen del defecto de esta clase tiene la ventaja de que debido a su generación por palpado navegado del contorno del defecto se conoce directamente una escala y se pueden determinar directamente las dimensiones del defecto y del contorno del defecto. Por otra parte una imagen del defecto de esta clase ofrece la ventaja de que sobre la imagen del defecto se puede superponer una estructura de calibrado virtual o un cuerpo de calibrado virtual, y esto con la escala de dimensiones correcta. Si se conocen por ejemplo la forma y el tamaño del primer cuerpo de calibrado se puede superponer en la imagen del defecto un segundo cuerpo de calibrado correspondiente a aquél, directamente y en la escala de dimensiones correcta. De este modo sobra la disposición de un cuerpo de calibrado real en o junto al defecto y por lo tanto la introducción de un cuerpo extraño en un cuerpo humano o animal.
En principio cabría imaginar representar la imagen del defecto como imagen de fondo sobre el dispositivo visualizador. Sin embargo es ventajoso si es la imagen en tiempo real la que se representa en el dispositivo visualizador como imagen de fondo, y la imagen del defecto como imagen de primer plano. En ambos casos se puede seguir de forma óptima el movimiento de la herramienta de mecanizado.
En principio cabría imaginar que la imagen del defecto y la imagen en tiempo real solamente varíen la una respecto a la otra en cuanto a su tamaño, de modo que los dos cuerpos de calibrado se representen al mismo...
Reivindicaciones:
1. Procedimiento para la preparación de un implante (58) destinado a rellenar un defecto (20) en un cuerpo humano o animal a base de un material de implante (54), en el cual se facilita una imagen (30) del defecto (20) que presenta un contorno de defecto (32), sobre el cual está representado un primer cuerpo de calibrado (24) dispuesto en o junto al defecto (20), donde sobre el material de implante (54) que se trata de mecanizar o junto a éste se dispone un segundo cuerpo de calibrado (56) que se corresponde con el primer cuerpo de calibrado (24), efectuándose una toma de imagen en tiempo real (48) del material de implante (54) y representándolo en tiempo real sobre un dispositivo visualizador (44), representándose la imagen del defecto (30) obtenida sobre el dispositivo visualizador (44) superponiéndolo con la imagen en tiempo real (48) de tal modo que el primer y el segundo cuerpo de calibrado (24, 56) se representen superpuestos con igual forma y tamaño, y donde se representa en el dispositivo de visualización (44) una herramienta de mecanizado (66) en la imagen en tiempo real (48) que se desplaza de tal modo sobre el material de implante (54) que en el dispositivo de visualización (44) siga el contorno del defecto (32) representado en la imagen del defecto (30).
2. Procedimiento según una de las reivindicaciones anteriores caracterizado porque para efectuar la toma de la imagen en tiempo real (48) se emplea un primer dispositivo generador de imagen (46) con un primer eje óptico (50) que se orienta con un primer ángulo de imagen con relación a un plano definido por el material de implante (54), porque se facilita una imagen del defecto (30) que se ha tomado con un segundo dispositivo generador de imagen (26) que presenta un segundo eje óptico (16), estando orientado el segundo eje óptico (16) con un segundo ángulo de imagen relativo a un plano definido por el defecto (20), y porque el primer ángulo de imagen se ajusta de acuerdo con el segundo ángulo de imagen.
3. Procedimiento según la reivindicación 1, caracterizado porque se facilita una imagen del defecto (30) que se tomó mediante un instrumento de palpado navegado mediante palpado del contorno del defecto (32).
4. Procedimiento según una de las reivindicaciones anteriores, caracterizado porque la imagen del defecto (30) y la imagen en tiempo real (48) se superponen en el dispositivo de visualización (44) mediante el desplazamiento de las dos representaciones relativamente entre sí y la modificación de un factor de ampliación de las dos representaciones relativamente entre sí.
5. Procedimiento según una de las reivindicaciones anteriores, caracterizado porque como primer y segundo cuerpo de calibrado (24', 56') se emplea en cada caso una estructura de calibrado (24', 56'), que comprende por lo menos dos elementos de calibrado (76', 74') que se encuentran en una relación geométrica fija entre sí.
6. Procedimiento según una de las reivindicaciones 2 a 5, caracterizado porque antes de la preparación del implante (58) se toma la imagen del defecto (30) con el segundo dispositivo generador de imagen (26), y porque antes de tomar la imagen del defecto (30) se dispone el segundo cuerpo de calibrado (24) en o contiguo al defecto (20).
7. Procedimiento según una de las reivindicaciones 2 a 5, caracterizado porque antes de la preparación del implante (58) se toma la imagen del defecto (30) con el segundo dispositivo generador de imagen (26) y porque después de la toma de la imagen del defecto (30) se superpone el segundo cuerpo de calibrado (24) en la imagen del defecto, en o contigua al defecto (20).
8. Procedimiento según la reivindicación 6 ó 7, caracterizado porque para la toma de la imagen del defecto (30) se orienta el segundo dispositivo generador de imagen (26) de tal modo que su eje óptico (16) quede orientado en dirección perpendicular o esencialmente perpendicular con respecto a un plano definido por el defecto (20).
9. Procedimiento según una de las reivindicaciones anteriores, caracterizado porque con la herramienta de mecanizado (66) se dibuja sobre el material de implante (54) una trayectoria de movimiento (70) correspondiente al contorno del defecto (32).
10. Procedimiento según una de las reivindicaciones anteriores, caracterizado porque con la herramienta de mecanizado (66) se recorta del material de implante (54) el implante (58) que se trata de preparar.
11. Procedimiento según una de las reivindicaciones anteriores, caracterizado porque con el procedimiento se prepara un implante de sucedáneo de cartílago (58) a partir de un material de implante de sucedáneo de cartílago (54).
12. Dispositivo (38) para la preparación de un implante (58) destinado a rellenar un defecto (20) en un cuerpo humano o animal, a partir de un material de implante (54), con un dispositivo de introducción de datos (34) para transmitir al dispositivo (38) una imagen del defecto (20) que presenta un contorno del defecto (32), estando representado sobre la imagen del defecto (30) un primer cuerpo de calibrado (24, 24') dispuesto en o contiguo al defecto (20), estando previsto un primer dispositivo generador de imagen (46) para tomar una imagen en tiempo real (48) de un segundo cuerpo de calibrado (56, 56') dispuesto sobre el o contiguo al material de implante (54) que se trata de mecanizar, correspondiéndose el primer cuerpo de calibrado (24, 24') con el segundo cuerpo de calibrado (56, 56'), estando previsto un dispositivo de visualización (44) para representar y superponer la imagen en tiempo real (48) y la imagen del defecto (30), estando realizado el dispositivo (38) de tal modo que con el dispositivo de visualización (44) se puedan representar el primer y el segundo cuerpo de calibrado (24, 56; 24', 56') superpuestos con igual forma y tamaño y donde con el dispositivo de visualización (44) se pueda representar al mismo tiempo y en tiempo real una herramienta de mecanizado (66) que se pueda mover a lo largo del contorno del defecto (32) representado en la imagen del defecto (30).
13. Dispositivo según la reivindicación 12, caracterizado porque el dispositivo (38) comprende un sistema de tratamiento de datos (36), y porque el dispositivo de tratamiento de datos (36) está realizado actuando conjuntamente con el dispositivo de introducción de datos (34) y con el primer dispositivo generador de imagen (46).
14. Dispositivo según la reivindicación 13, caracterizado porque el sistema de tratamiento de datos (36) está realizado de tal modo que la imagen del defecto (30) y/o la imagen en tiempo real (48) se puedan representar en el dispositivo de visualización (44) modificando su tamaño y posición.
15. Dispositivo según una de las reivindicaciones 12 a 14, caracterizado porque con el dispositivo (38) se puede realizar un procedimiento según una de las reivindicaciones 1 a 11.
Patentes similares o relacionadas:
Dispositivo médico de formación de imágenes que utiliza una cuna de lentes térmicamente conductora, del 17 de Abril de 2019, de Integrated Endoscopy Inc: Un endoscopio, que comprende: una porción extrema proximal; una porción extrema distal ; una pluralidad de lentes dispuestas en un recorrido […]
Equipo para la limpieza de la lente de un artroscopio, del 7 de Julio de 2016, de MONJE GIL, Florencio: Equipo para la limpieza de la lente de un artroscopio, que comprende una bomba de impulsión, un potenciómetro que controla la alimentación […]
ARTROSCOPIO DE VISION VARIABLE., del 16 de Junio de 2006, de DURELL & GITELIS INC.: Artroscopio de visión variable que tiene más de una posición de visualización, incluyendo una primera posición de visualización (figura 5) y una segunda posición de visualización […]
SISTEMA DE CARTÍLAGO PARTICULADO, del 7 de Noviembre de 2011, de ISTO TECHNOLOGIES INC. ZIMMER INC: Una composición que comprende partículas de cartílago de un donante humano de menos de quince años de edad en el momento de la donación
 IMPLANTE PARA REPARAR UN DEFECTO DE CARTÍLAGO, del 29 de Abril de 2011, de TETEC-TISSUE ENGINEERING TECHNOLOGIES AKTIENGESELLSCHAFT: Implante para reparar un defecto de cartílago que consiste en una primera capa y una segunda capa, donde la primera capa es una estructura de barrera protectora de tipo […]
IMPLANTE PARA REPARAR UN DEFECTO DE CARTÍLAGO, del 29 de Abril de 2011, de TETEC-TISSUE ENGINEERING TECHNOLOGIES AKTIENGESELLSCHAFT: Implante para reparar un defecto de cartílago que consiste en una primera capa y una segunda capa, donde la primera capa es una estructura de barrera protectora de tipo […]
 IMPLANTE DE REPARACION DE CARTILAGO CON SUPERFICIE DE SOPORTE BLANDA YDISPOSITIVO DE ANCLAJE FLEXIBLE, del 25 de Junio de 2010, de MANSMANN, KEVIN A: Implante quirúrgico para reparar cartílago hialino dañado en una articulación de mamífero, que comprende:
una capa de anclaje que está […]
IMPLANTE DE REPARACION DE CARTILAGO CON SUPERFICIE DE SOPORTE BLANDA YDISPOSITIVO DE ANCLAJE FLEXIBLE, del 25 de Junio de 2010, de MANSMANN, KEVIN A: Implante quirúrgico para reparar cartílago hialino dañado en una articulación de mamífero, que comprende:
una capa de anclaje que está […]
 INJERTO METALICO-ESPONJOSO Y PROCEDIMINETO DE FABRICACION DEL MISMO, del 29 de Noviembre de 2010, de SYNTAN GBR: Injerto metálico-esponjoso como sustituto óseo aloplástico a base de una esponja metálica de porosidad abierta altamente resistente, por ejemplo […]
INJERTO METALICO-ESPONJOSO Y PROCEDIMINETO DE FABRICACION DEL MISMO, del 29 de Noviembre de 2010, de SYNTAN GBR: Injerto metálico-esponjoso como sustituto óseo aloplástico a base de una esponja metálica de porosidad abierta altamente resistente, por ejemplo […]
Implante de articulación subastragalina, del 15 de Julio de 2020, de Paragon 28, Inc: Un implante de articulación subastragalina para reemplazar una articulación subastragalina natural existente entre los huesos astrágalo y calcáneo de […]