TRANSMISION CONTINUAMENTE VARIABLE.
Un mecanismo que transmite par motor y velocidad de rotación desde un árbol de entrada hasta un árbol de salida de una manera continuamente variable,
que comprende dos conjuntos de engranajes planetarios (18, 19; 46, 47) dispuestos en ejes paralelos, teniendo dichos conjuntos de engranajes planetarios dientes en los perímetros externos de sus coronas dentadas (4, 13; 32, 42) que engranan entre sí en sus perímetros externos, de tal manera que si una de dichas coronas dentadas rota en un sentido, la otra de dichas coronas dentadas rota en el sentido opuesto, afectando a las rotaciones de las otras piezas que constituyen cada conjunto de engranajes planetarios, incluyendo dichas piezas para cada conjunto de engranajes planetarios un engranaje solar (2, 11; 30, 41), engranajes planetarios (3, 12; 31, 43) y un portasatélites (5, 14; 33, 39), haciendo, de esta manera, una variación continua de la relación de transmisión que existe entre dos árboles centrales de los conjuntos de engranajes planetarios anteriormente mencionados,
caracterizado porque dichos árboles centrales de los conjuntos de engranajes planetarios rotan en el mismo sentido de rotación, por medio de una disposición mecánica de tres engranajes (7, 8, 9; 35, 36, 37) del mismo o diferente diámetro
Tipo: Resumen de patente/invención. Número de Solicitud: W04004322IB.
Solicitante: BRENA PINERO, CARLOS ALBERTO.
Nacionalidad solicitante: México.
Dirección: PINO SUAREZ 408,OAXACA, OAX., 68000.
Inventor/es: BRENA PINERO,CARLOS ALBERTO.
Fecha de Publicación: .
Fecha Concesión Europea: 28 de Octubre de 2009.
Clasificación Internacional de Patentes:
- F16H3/72E
Clasificación PCT:
- F16H3/72 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F16 ELEMENTOS O CONJUNTOS DE TECNOLOGIA; MEDIDAS GENERALES PARA ASEGURAR EL BUEN FUNCIONAMIENTO DE LAS MAQUINAS O INSTALACIONES; AISLAMIENTO TERMICO EN GENERAL. › F16H TRANSMISIONES. › F16H 3/00 Transmisiones de engranajes para transmitir un movimiento rotativo con una relación de velocidad variable o para invertir el movimiento rotativo (mecanismos, cambio de velocidad o de insersión F16H 59/00 - F16H 63/00). › con un accionamiento secundario, p. ej. un motor regulador para hacer variar la velocidad de una manera continua.
- F16H3/74 F16H 3/00 […] › Conjuntos que no utilizan órganos de cambio de velocidad u órganos de regulación, p. ej. con relación de velocidad determinada por el libre juego del rozamiento de otras fuerzas.
- F16H37/04 F16H […] › F16H 37/00 Combinaciones de transmisiones mecánicas no previstas anteriormente F16H 1/00 - F16H 35/00 (combinaciones de una transmisión mecánica con acoplamientos hidraúlicos o transmisión por fluido F16H 47/00). › Combinaciónes únicamente de transmisiones de engranajes (F16H 37/06 tiene prioridad).
Fragmento de la descripción:
Transmisión continuamente variable.
La presente invención se refiere a una transmisión continuamente variable (TCV), es decir, una transmisión con una relación de par motor y velocidad de rotación entre un árbol de entrada y un árbol de salida, que puede variarse gradualmente.
Campo técnico
La transmisión de la invención puede usarse, ya sea en vehículos automóviles o en maquinaria industrial (tornos, fresadoras, etc.) donde la transmisión de potencia se lleva a cabo por medio de engranajes, lo que posibilita el tener una salida de elevado par motor y también elevada velocidad de rotación si se requiere.
Técnica anterior
Las transmisiones continuamente variables se usan en particular en coches, scooters y máquinas industriales, a los que se hará referencia en la siguiente descripción, sin restringir, sin embargo, el campo de aplicación de la invención.
En las transmisiones mecánicas conocidas, se han descubierto diferentes soluciones, para obtener transmisiones que tienen la característica de llevar a cabo una variación continua de par motor y velocidad de rotación. Entre ellas, se pueden mencionar las que funcionan por medio de fricción, transmitiendo la potencia a radios variables, por medio de correas sobre conos, o por medio de contacto físico de piezas rotativas.
Las transmisiones de esa clase son limitadas, porque no pueden transmitir elevados pares motores cuando el mecanismo es de pequeño tamaño, o en el caso opuesto, ocupan demasiado espacio.
Otras soluciones aplicadas para lograr el efecto de variación continua han sido las transmisiones de tipo hidráulico, que modifican la relación entre la presión y el volumen de flujo que corresponde a los árboles de entrada y salida. Las transmisiones de esta clase suponen generalmente considerables pérdidas de energía y, en ciertos casos, no tienen la posibilidad de transmitir elevadas velocidades de rotación. El documento US5800302A desvela las características del preámbulo de la reivindicación 1.
También hay mecanismos asistidos, en los que, además del motor principal, hay otro motor de menor potencia que interviene en la transmisión, modificando el par motor y la velocidad de rotación del árbol de salida. Se considera que la presente invención está dentro de esta categoría, teniendo la ventaja comparada con las transmisiones similares de la técnica anterior, de que el motor adicional (denominado servomotor en este documento) tiene un consumo de energía considerablemente menor que el de un servomotor de una transmisión conocida similar, cuanto ambos llevan a cabo el mismo trabajo.
Exposición de la invención
El objetivo de la invención es proporcionar una transmisión continuamente variable, capaz de transmitir elevados pares motores y elevadas velocidades de revolución, ocupando un espacio pequeño, que tiene la posibilidad de ser regulada electrónicamente, lo que permite cumplir con requisitos específicos de funcionamiento, ya sea en una aplicación industrial o automotriz.
Una ventaja de esta invención, en comparación con transmisiones conocidas similares, es que usa para su funcionamiento un servomotor con menor consumo de energía y requiriendo un menor espacio.
Breve descripción de los dibujos
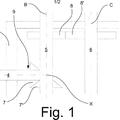
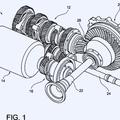
La Figura 1 es una vista en perspectiva del montaje de una realización preferida de la transmisión continuamente variable de par motor y velocidad de rotación según la invención.
La Figura 2 es una vista en perspectiva de las partes separadas de la realización preferida mostrada en la Figura 1. En este dibujo, los dientes de los engranajes no están representados detalladamente sino que, en cambio, están simbolizados por medio de líneas.
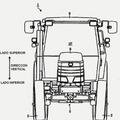
La Figura 3 es un diagrama del montaje de la realización preferida mostrada en las Figuras 1 y 2, que delinea su situación dentro de una carcasa y que muestra direcciones para el control electrónico de esta realización.
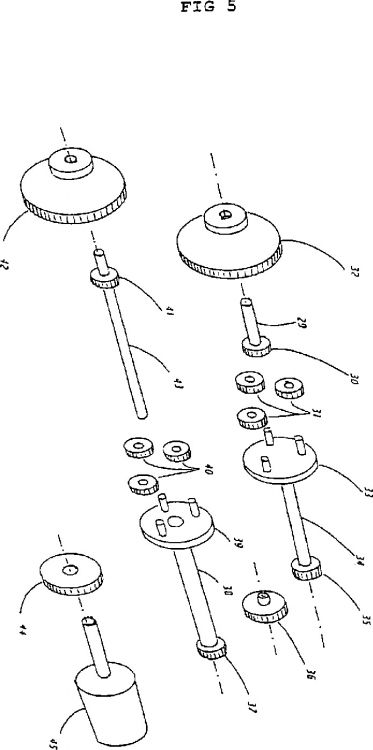
La Figura 4 es una vista en perspectiva del montaje de otra realización preferida de la transmisión continuamente variable de par motor y velocidad de rotación según esta invención.
La Figura 5 es una vista en perspectiva de las partes separadas de la realización preferida mostrada en la Figura 4. En este dibujo, los dientes de los engranajes no están representados detalladamente sino que, en cambio, están simbolizados por medio de líneas.
Modos preferidos para llevar a cabo la invención
La Figura 1 muestra una vista en perspectiva del montaje de una de las realizaciones preferidas del mecanismo de la transmisión continuamente variable de par motor y velocidad de rotación, que muestra la disposición general del mecanismo. Ese mecanismo está caracterizado por dos conjuntos de engranajes planetarios (18 y 19) que tienen dientes de engranajes en sus perímetros externos, tres engranajes para la igualación del sentido de rotación (7, 8 y 9), un servomotor (17), un engranaje del servomotor (16), una pluralidad de árboles, entre los que están identificados el árbol de entrada (1) y el árbol de salida (15).
La Figura 2 muestra una vista en perspectiva de las partes separadas de las realizaciones preferidas mostradas en la Figura 1. En ese dibujo, los dientes de los engranajes no están representados detalladamente sino que, en cambio, están simbolizados por medio de líneas. En la vista de la Figura 2, se muestra la posición asimétrica de los portasatélites (5 y 14). Es decir: mirando el plano perpendicular a los árboles de las coronas dentadas (4 y 13), el portasatélites (5) está en un lado, y el portasatélites (14) está en el otro lado.
El funcionamiento del mecanismo es el siguiente:
El par motor y la velocidad de rotación, que se desea que sean transformados de una manera continuamente variable, son recibidos por el árbol (1), que está unido junto con, o constituye una pieza con el engranaje solar (2). La rotación del engranaje solar (2) se transmite a los engranajes planetarios (3), que están situados sobre su periferia. El número de esos engranajes planetarios puede variar. Puede haber uno o varios engranajes planetarios, sin embargo, generalmente es aconsejable tener tres o cuatro engranajes planetarios para conseguir una distribución adecuada de la fuerza transmitida a ellos. Los engranajes planetarios (3) engranan con los dientes internos de la corona dentada (4), que son empujados en la dirección de la fuerza tangencial impartida a ellos por los engranajes planetarios anteriormente mencionados. Esta tendencia de rotación de la corona dentada (4) es opuesta a la tendencia de rotación de la corona dentada (13). La razón para esta oposición se verá más adelante en este documento.
Cuando los engranajes planetarios (3) encuentran un soporte en los dientes internos de la corona dentada (4), hacen rotar el portasatélites (5), el árbol (6) y el engranaje (7). Estos tres componentes están unidos entre sí. Es aconsejable hacer desmontable el engranaje (7).
El engranaje (7) transmite su sentido de rotación al engranaje (9) por medio del engranaje (8), y de esta manera, los árboles (10 y 6) rotan en el mismo sentido de rotación, observado en el mismo plano.
El árbol (10) es tubular y hace rotar el engranaje solar (11) que está unido a él. Es aconsejable hacer esta unión por medio de ranuras, para facilitar el montaje y desmontaje de la corona dentada (13).
La rotación del engranaje solar (11) se transmite a los engranajes planetarios (12), que engranan con los dientes internos de la corona dentada (13), que son empujados en la dirección de la fuerza tangencial impartida por esos engranajes planetarios. La tendencia de rotación de la corona dentada (13) es opuesta a la tendencia de rotación de la corona dentada (4), porque el sentido de rotación del árbol (6) y el sentido de rotación del árbol (10) se han hecho para ser iguales. Esta oposición de las tendencias de rotación de las coronas dentadas (4 y 13) hace que ambas coronas dentadas funcionen como soportes de los engranajes planetarios (3 y 12), transmitiendo el par motor y la velocidad de rotación, respectivamente a los portasatélites (5 y 14). De esta manera, cuando los engranajes planetarios (12) encuentran un soporte en los dientes internos de la corona dentada (13), hacen rotar el portasatélites (14) y el árbol de salida (15), que está unido junto con, o se considera que constituye una pieza con este portasatélites.
El árbol de salida (15) pasa libremente a través del árbol tubular (10) y el engranaje (9)...
Reivindicaciones:
1. Un mecanismo que transmite par motor y velocidad de rotación desde un árbol de entrada hasta un árbol de salida de una manera continuamente variable, que comprende dos conjuntos de engranajes planetarios (18, 19; 46, 47) dispuestos en ejes paralelos, teniendo dichos conjuntos de engranajes planetarios dientes en los perímetros externos de sus coronas dentadas (4, 13; 32, 42) que engranan entre sí en sus perímetros externos, de tal manera que si una de dichas coronas dentadas rota en un sentido, la otra de dichas coronas dentadas rota en el sentido opuesto, afectando a las rotaciones de las otras piezas que constituyen cada conjunto de engranajes planetarios, incluyendo dichas piezas para cada conjunto de engranajes planetarios un engranaje solar (2, 11; 30, 41), engranajes planetarios (3, 12; 31, 43) y un portasatélites (5, 14; 33, 39), haciendo, de esta manera, una variación continua de la relación de transmisión que existe entre dos árboles centrales de los conjuntos de engranajes planetarios anteriormente mencionados,
caracterizado porque dichos árboles centrales de los conjuntos de engranajes planetarios rotan en el mismo sentido de rotación, por medio de una disposición mecánica de tres engranajes (7, 8, 9; 35, 36, 37) del mismo o diferente diámetro.
2. Un mecanismo, según la Reivindicación 1, caracterizado por el hecho de que además comprende un servomotor (17, 45) que hace rotar las coronas dentadas de los conjuntos de engranajes planetarios, por medio de un engranaje, modificando la relación de transmisión que existe entre los árboles centrales de los conjuntos de engranajes planetarios.
3. Un mecanismo según la Reivindicación 2, caracterizado por el hecho de que tiene, además, una unidad de control automático (24) que gobierna el par motor y la velocidad de rotación del servomotor.
Patentes similares o relacionadas:
 Molino de rodillos para piensos y alimentos con un engranaje, del 28 de Agosto de 2019, de BUHLER AG: Molino de rodillos para piensos y alimentos que comprende al menos dos rodillos alojados de forma rotatoria , apoyándose al menos uno de los […]
Molino de rodillos para piensos y alimentos con un engranaje, del 28 de Agosto de 2019, de BUHLER AG: Molino de rodillos para piensos y alimentos que comprende al menos dos rodillos alojados de forma rotatoria , apoyándose al menos uno de los […]
Una caja de engranajes epicicloidal y una turbina eólica que comprende al menos una caja de engranajes epicicloidal, del 13 de Junio de 2018, de VESTAS WIND SYSTEMS A/S: Una caja de engranajes epicicloidal que comprende una carcasa de caja de engranajes, una o más partes de la caja de engranajes […]
Disposición de accionamiento para una turbina eólica, del 21 de Marzo de 2018, de Moventas Gears UK Limited: Una disposición de accionamiento para una turbina eólica, comprendiendo la disposición de accionamiento: un árbol de rotor; un conjunto de caja […]
Motor con hélices perpendiculares a su eje, del 12 de Febrero de 2018, de PORRAS VILA,FCO. JAVIER: El motor con hélices perpendiculares a su eje, es un sistema muy útil en los ventiladores caseros, y, en las hélices de los motores de avión, […]
Sistema de transmisión de potencia de vehículo, del 28 de Junio de 2017, de TOYOTA JIDOSHA KABUSHIKI KAISHA: Aparato de transmisión de potencia de vehículo que comprende: un mecanismo de engranaje planetario en una trayectoria de transmisión de potencia, transmitiéndose […]
 Vehículo de trabajo, del 24 de Febrero de 2016, de ISEKI & CO., LTD: Un vehículo de trabajo que comprende:
un mecanismo principal de cambio de velocidad configurado para transmitir una potencia de rotación, generada […]
Vehículo de trabajo, del 24 de Febrero de 2016, de ISEKI & CO., LTD: Un vehículo de trabajo que comprende:
un mecanismo principal de cambio de velocidad configurado para transmitir una potencia de rotación, generada […]
 Sistema de transmisión, del 22 de Febrero de 2016, de DEERE & COMPANY: Sistema de transmisión para un vehículo agrícola, con una primera unidad de transmisión , una segunda unidad de transmisión acoplada a la anterior en el […]
Sistema de transmisión, del 22 de Febrero de 2016, de DEERE & COMPANY: Sistema de transmisión para un vehículo agrícola, con una primera unidad de transmisión , una segunda unidad de transmisión acoplada a la anterior en el […]
 Transmisión híbrida para vehículo a motor, del 18 de Enero de 2016, de OERLIKON GRAZIANO S.P.A.: Transmisión híbrida para un vehículo a motor, que comprende una caja de velocidades principal y una máquina eléctrica individual ,
[…]
Transmisión híbrida para vehículo a motor, del 18 de Enero de 2016, de OERLIKON GRAZIANO S.P.A.: Transmisión híbrida para un vehículo a motor, que comprende una caja de velocidades principal y una máquina eléctrica individual ,
[…]