PROCEDIMIENTO QUIRURGICO DE LOCALIZACION SIN IMAGEN PARA SUSTITUCION DE LA CADERA.
Un método de determinar la posición pélvica de un paciente quirúrgico e introducir dicha posición en un ordenador mediante un sistema de seguimiento,
adecuado para uso al navegar en cirugía de sustitución total o parcial de la cadera, incluyendo los pasos de:
alinear (200) el paciente en relación a un bastidor de colocación del paciente (120) con características anatómicas pélvicas del paciente dispuestas en relación mecánica fija con características de colocación correspondientes en dicho bastidor de colocación;
adquirir (202) con un sistema de seguimiento las posiciones de una pluralidad de puntos índice (171-173), en dicho bastidor de colocación, donde cada uno de dichos puntos índice está dispuesto respectivamente en un desplazamiento previamente conocido con relación a una característica de dichas características de colocación; y
definir (206) un plano pélvico mediante cálculo de las posiciones adquiridas de dichos puntos índice, incluyendo dicho cálculo:
compensar el desplazamiento previamente conocido de cada punto índice con relación a su característica de colocación correspondiente, hallando por ello las posiciones de dichas características de colocación a partir de las posiciones adquiridas de dichos puntos índice; y
definir un plano a partir de las posiciones calculadas de las características de colocación
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2003/024991.
Solicitante: KINAMED, INC.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 820 FLYNN ROAD,CAMARILLO, CA 93012-8710.
Inventor/es: SARIN,VINEET, PRATT,WILLIAM,RALPH, BRUCE,ROBERT,A, PRATT,CLYDE,RONALD, CARIGNAN,ROGER,C.
Fecha de Publicación: .
Fecha Concesión Europea: 7 de Abril de 2010.
Clasificación Internacional de Patentes:
- A61B19/00N6T
Clasificación PCT:
- A61B19/00
- A61F2/00 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61F FILTROS IMPLANTABLES EN LOS VASOS SANGUINEOS; PROTESIS; DISPOSITIVOS QUE MANTIENEN LA LUZ O QUE EVITAN EL COLAPSO DE ESTRUCTURAS TUBULARES, p. ej. STENTS; DISPOSITIVOS DE ORTOPEDIA, CURA O PARA LA CONTRACEPCION; FOMENTACION; TRATAMIENTO O PROTECCION DE OJOS Y OIDOS; VENDAJES, APOSITOS O COMPRESAS ABSORBENTES; BOTIQUINES DE PRIMEROS AUXILIOS (prótesis dentales A61C). › Filtros implantables en los vasos sanguíneos; Prótesis, es decir, elementos de sustitución o de reemplazo para partes del cuerpo; Dispositivos para unirlas al cuerpo; Dispositivos para proporcionar permeabilidad o para evitar que colapsen las estructuras tubulares del cuerpo, p. ej. stents (como artículos cosméticos, ver las subclases apropiadas, p. ej. pelucas o postizos, A41G 3/00, A41G 5/00, uñas artificiales A45D 31/00; prótesis dentales A61C 13/00; materiales para prótesis A61L 27/00; riñones artificiales A61M 1/14; corazones artificiales A61M 60/00).
Clasificación antigua:
- A61F2/00 A61F […] › Filtros implantables en los vasos sanguíneos; Prótesis, es decir, elementos de sustitución o de reemplazo para partes del cuerpo; Dispositivos para unirlas al cuerpo; Dispositivos para proporcionar permeabilidad o para evitar que colapsen las estructuras tubulares del cuerpo, p. ej. stents (como artículos cosméticos, ver las subclases apropiadas, p. ej. pelucas o postizos, A41G 3/00, A41G 5/00, uñas artificiales A45D 31/00; prótesis dentales A61C 13/00; materiales para prótesis A61L 27/00; riñones artificiales A61M 1/14; corazones artificiales A61M 60/00).
Fragmento de la descripción:
Procedimiento quirúrgico de localización sin imagen para sustitución de la cadera.
Antecedentes de las invenciones
Esta invención se refiere en general a cirugía asistida por ordenador y más específicamente a operaciones asistidas por ordenador de sustitución total de la cadera (THR) o artroplastia de cadera.
Las operaciones de sustitución total de la cadera o artroplastia son cada vez más frecuentes en los Estados Unidos, realizándose anualmente más de 300.000 operaciones. Muchos procedimientos requerirán eventualmente revisión, debido a algunos de varios problemas. Pueden surgir problemas con el implante, que se puede desgastar, degradar o incluso fracturar. En otros casos, puede tener lugar dislocación de la cadera sustituida, produciendo dolor extremo (por no mencionar los inconvenientes y el gasto). La frecuencia de la dislocación permanece en aproximadamente 2-6 por ciento, a pesar de las mejoras de la técnica y los materiales.
Es conocido que la incidencia de la dislocación post-quirúrgica está relacionada con la orientación de los componentes de sustitución de la cadera, en particular con la orientación angular del componente de envoltura acetabular en relación a la anatomía ósea. Véase Lewinnek y colaboradores, "Dislocation after total hipreplacement Arthroplasties", Journal of Bone and Joint Surgery, Vol. 60A, N° 2, pág. 217-220 (1978). También se considera que la geometría de la cabeza y cuello del implante es un factor.
A pesar de la investigación publicada, el cirujano típico no ha adoptado ningún método sofisticado de navegar en cirugía de sustitución de la cadera, a pesar de la disponibilidad de varias técnicas. El método más predominante se basa en una herramienta de impactor con un mango colocado en un ángulo predeterminado de modo que si el mango a mantiene a un nivel, orientación horizontal, la envoltura acetabular esté en un ángulo deseado. Este método no tiene en cuenta el considerable movimiento y variación en la posición pélvica del paciente durante la cirugía; peor aún, alinea la envoltura con la mesa de quirófano (no necesariamente la pelvis). Se han desarrollado métodos más tecnológicos, incluyendo el método sofisticado descrito en la Patente de Estados Unidos número 6.205.411 (y solicitudes relacionadas) de DiGioia y colaboradores (2001). El método de DiGioia es un avance sobre los métodos anteriores (que resume perentoriamente en su sección "Antecedentes").
El método de DiGioia comienza con amplia formación de imágenes preoperativas, incluyendo exploración CT relativamente cara. Las imágenes preoperativas se introducen posteriormente en un modelo de ordenador digital, que realiza amplio modelado tridimensional incluyendo simulaciones del rango de movimiento de la anatomía del paciente en relación a un modelo informático específico de un implante concreto. A continuación, en una fase intraoperativa, los modelos preoperativos son registrados con datos de seguimiento óptico intraoperativo: se muestrea un número muy grande de puntos en la pelvis y el fémur, y el ordenador encaja los datos en el modelo preoperativo. Finalmente, el implante se coloca para alinearlo lo más estrechamente posible con el modelo informático optimizado.
El método de DiGioia y colaboradores es complejo y requiere sofisticadas técnicas digitales y radiológicas. Todavía se necesita un método más simple de navegación quirúrgica que facilite la geometría apropiada de la cadera con un mínimo de imágenes preoperativas y gasto. Se observa frecuentemente que los médicos son reacios a adoptar cualesquiera métodos, y en particular cualesquiera métodos computerizados, que sean excesivamente complejos, caros o lentos. Por ello se pueden olvidar, a la luz de las crecientes limitaciones económicas que lastran la práctica médica moderna.
El documento CA-A-2334495 describe un método de determinar la posición pélvica de un paciente quirúrgico e introducir dicha posición en un ordenador mediante un sistema de seguimiento usando una sonda rastreada para digitalizar puntos de referencia en el paciente.
Así, persiste la necesidad de un sistema intraoperativo de navegación en cadera asistido por ordenador que se aprenda fácilmente, ejecute rápidamente, sea económicamente práctico, e independiente de las caras o exóticas imágenes radiológicas preoperativas.
Además, se necesitan métodos específicos que faciliten el seguimiento del plano pélvico del paciente y el fémur del paciente, en conexión con un sistema de navegación en cadera asistido por ordenador.
Resumen de la invención
En vista de los problemas anteriores, la presente invención incluye un método de determinar la posición pélvica de un paciente quirúrgico e introducir dicha posición en un ordenador mediante un sistema de seguimiento, adecuado para uso al navegar en cirugía de sustitución parcial o total de la cadera según la reivindicación 1. Según el método, primero se alinea el paciente con puntos de referencia anatómicos en relación a las características de colocación correspondientes en un posicionador de paciente. Las posiciones de las características índice en el posicionador de paciente se adquieren entonces mediante un sistema de seguimiento. En base a las posiciones de las características índice y su relación conocida con las características de localización se calculan las posiciones de las características de referencia anatómicas y se define un plano pélvico.
Estas y otras características y ventajas de la invención serán evidentes a los expertos en la técnica de conocer la descripción detallada de realizaciones preferidas, tomada conjuntamente con los dibujos acompañantes, en los que:
Breve descripción de los dibujos
La figura 1 es un diagrama de bloques a nivel de sistema del entorno en el que opera la invención.
La figura 2 es una vista en perspectiva despiezada un marcador femoral rastreable que une al fémur mediante un dispositivo de fijación.
La figura 3 es una vista en perspectiva del marcador femoral rastreable de la figura 2, fijado en una posición típica en un fémur humano.
La figura 4 es una vista frontal de la porción de fijación ósea del marcador femoral rastreable, con el blanco rastreable quitado y el acoplamiento soltable separado.
La figura 5 es una vista superior de un primer elemento en cola de milano del acoplamiento soltable, útil para unir extraíblemente la fijación ósea al blanco rastreable.
La figura 6 es una vista lateral del primer elemento en cola de milano representado en la figura 5.
La figura 7 es una vista superior de un segundo elemento del acoplamiento soltable, capaz de acoplamiento con el primer elemento representado en las figuras 5 y 6.
La figura 8 es una vista frontal del segundo elemento representado en la figura 7.
La figura 9 es una vista lateral (de extremo) del segundo elemento representado en las figuras 7 y 8.
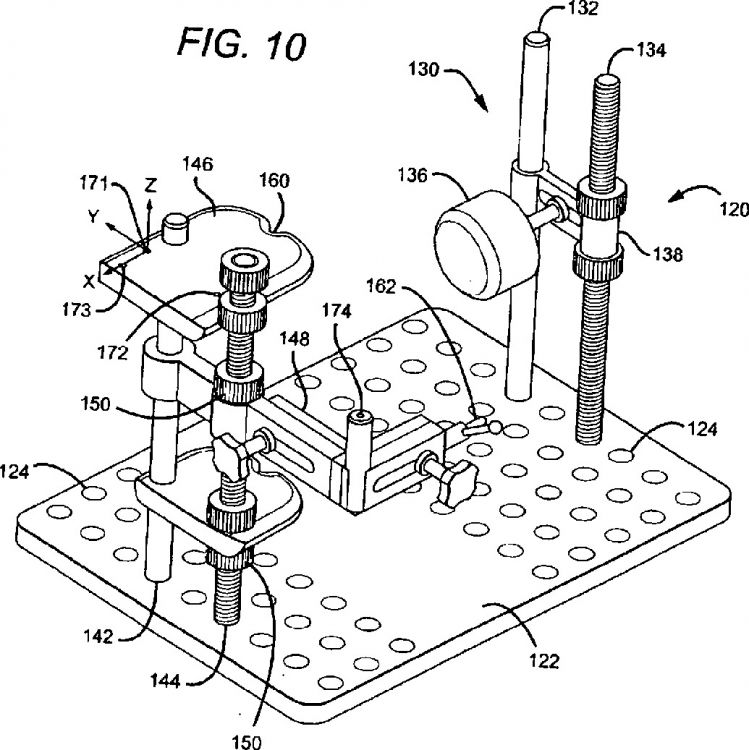
La figura 10 es una vista isométrica de un posicionador de paciente calibrado, útil para localizar un plano pélvico del paciente según la invención.
La figura 11 es una vista superior del posicionador de paciente calibrado de la figura 10.
Y la figura 12 es un diagrama de flujo de un método para determinar una posición pélvica del paciente e introducir dicha posición en un ordenador mediante un rastreador óptico.
Descripción detallada de la invención
La figura 1 representa un diagrama de bloques a nivel de sistema de un sistema o aparato 20 que proporciona el entorno en el que opera la presente invención. El sistema o aparato 20 es generalmente un sistema asistido por ordenador para navegar en cirugía ortopédica. Un médico u otro profesional 22 realiza una cirugía de cadera (por ejemplo, sustitución total de la cadera) en un paciente 24. Un localizador óptico o equivalente o sistema de localización 26 está dispuesto cerca del paciente, de modo que el campo operativo esté abarcado sustancialmente dentro del campo de visión 28 del localizador 26. Se puede obtener en el mercado un localizador óptico adecuado, por ejemplo, el "Polaris" que se puede obtener de Northern Digital Inc., en Waterloo, Ontario, Canadá. Se usan rastreadores ópticos o marcadores 30 durante la operación, como se describe más plenamente en la solicitud relacionada de Estados Unidos, número de serie 10/075.796 publicada ahora...
Reivindicaciones:
1. Un método de determinar la posición pélvica de un paciente quirúrgico e introducir dicha posición en un ordenador mediante un sistema de seguimiento, adecuado para uso al navegar en cirugía de sustitución total o parcial de la cadera, incluyendo los pasos de:
alinear (200) el paciente en relación a un bastidor de colocación del paciente (120) con características anatómicas pélvicas del paciente dispuestas en relación mecánica fija con características de colocación correspondientes en dicho bastidor de colocación;
adquirir (202) con un sistema de seguimiento las posiciones de una pluralidad de puntos índice (171-173), en dicho bastidor de colocación, donde cada uno de dichos puntos índice está dispuesto respectivamente en un desplazamiento previamente conocido con relación a una característica de dichas características de colocación; y
definir (206) un plano pélvico mediante cálculo de las posiciones adquiridas de dichos puntos índice, incluyendo dicho cálculo:
2. El método de la reivindicación 1, donde dichas características anatómicas pélvicas son la columna vertebral ilíaca anterior superior derecha (ASIS), LA ASIS izquierda, y la sínfisis púbica;
y donde dichas características de colocación incluyen tres características de colocación dispuestas para enganchar DICHA ASIS derecha, ASIS izquierda, y sínfisis púbica respectivamente, de tal manera que dichas tres características de colocación definan el plano pélvico.
3. El método de la reivindicación 2, donde dichas características de colocación incluyen un indicador púbico retráctil (162) que se puede regular para palpar la sínfisis púbica del paciente.
4. El método de la reivindicación 3, donde dichas características de colocación incluyen además al menos una concavidad de indicador de ASIS (160) soportada por un conjunto de soporte delantero (140) de dicho bastidor de colocación del paciente.
5. El método de la reivindicación 4, donde dicho bastidor de colocación del paciente incluye además un conjunto de soporte trasero (130) dispuesto ajustablemente para incluir el paciente fijamente entre dicho conjunto de soporte delantero y dicho conjunto de soporte trasero.
6. El método de la reivindicación 3, donde dicho paso de adquirir con un sistema de seguimiento las posiciones de una pluralidad de puntos índice incluye:
tocar dichos puntos índice con una sonda ópticamente rastreable;
calcular la posición de dicha sonda ópticamente rastreable mientras dicha sonda está tocando dichos puntos índice; y
compensar una dimensión y forma conocidas de dicha sonda.
Patentes similares o relacionadas:
 SISTEMA DE NAVEGACION QUIRURGICO PARA REALIZAR UNA CAVIDAD DE RECEPCION PARA UN ACETABULO, del 5 de Octubre de 2010, de AESCULAP AG: Sistema de navegación quirúrgico para una herramienta navegada para realizar una cavidad de recepción para un acetábulo en un hueso pélvico navegado, […]
SISTEMA DE NAVEGACION QUIRURGICO PARA REALIZAR UNA CAVIDAD DE RECEPCION PARA UN ACETABULO, del 5 de Octubre de 2010, de AESCULAP AG: Sistema de navegación quirúrgico para una herramienta navegada para realizar una cavidad de recepción para un acetábulo en un hueso pélvico navegado, […]
 CATETER GUIADO ROBOTICAMENTE, del 19 de Agosto de 2010, de BIOSENSE WEBSTER, INC.: Aparato para usarse con un catéter manejable que incluye un control para el pulgar adaptado para controlar una desviación de […]
CATETER GUIADO ROBOTICAMENTE, del 19 de Agosto de 2010, de BIOSENSE WEBSTER, INC.: Aparato para usarse con un catéter manejable que incluye un control para el pulgar adaptado para controlar una desviación de […]
 DISPOSITIVO DE TRATAMIENTO NO INVASIVO DE AFECCIONES DISCALES POR MEDIO DE ULTRASONIDOS, del 15 de Abril de 2010, de ULTRAZONIX DNT AB: Dispositivo de tratamiento no invasivo de afecciones discales por medio de ultrasonidos, que tiene al menos un transductor de ultrasonidos […]
DISPOSITIVO DE TRATAMIENTO NO INVASIVO DE AFECCIONES DISCALES POR MEDIO DE ULTRASONIDOS, del 15 de Abril de 2010, de ULTRAZONIX DNT AB: Dispositivo de tratamiento no invasivo de afecciones discales por medio de ultrasonidos, que tiene al menos un transductor de ultrasonidos […]
Método implementado por ordenador de provisión de una representación digital de una plantilla ortodóntica para la colocación de un objeto en un diente de un paciente, del 1 de Abril de 2020, de ALIGN TECHNOLOGY, INC.: Método implementado por ordenador de provisión de una representación digital de una plantilla ortodóntica para colocar un objeto en un diente de un […]
Combinación de un instrumento de terapia y formación de imagen, del 26 de Febrero de 2020, de ETHICON, INC.: Un instrumento combinado de terapia y formación de imágenes, comprendiendo el instrumento: una sonda de terapia para producir energía para alterar el tejido; […]
 Localizador de profundidad de punción vascular, del 26 de Junio de 2019, de Terumo Puerto Rico L.L.C: Conjunto de inserción vascular, que comprende:
una vaina de inserción ;
un dilatador ;
la vaina de inserción […]
Localizador de profundidad de punción vascular, del 26 de Junio de 2019, de Terumo Puerto Rico L.L.C: Conjunto de inserción vascular, que comprende:
una vaina de inserción ;
un dilatador ;
la vaina de inserción […]
Sistemas y métodos para la fabricación de una plantilla dental, del 28 de Mayo de 2019, de ALIGN TECHNOLOGY, INC.: Método para fabricación de una plantilla dental para posicionar un objeto en un diente de un paciente, que comprende: crear un modelo de diente […]
Endoscopio y dispositivo de tratamiento de accesorios integrado, del 4 de Marzo de 2019, de C.R. BARD, INC.: Endoscopio integrado que comprende un vástago que tiene extremos proximal y distal, y un dispositivo de aposición de tejido en el extremo distal […]