NAVEGACION DE TERRENO PASIVA.
Una disposición de navegación de terreno pasiva (300) que comprende:
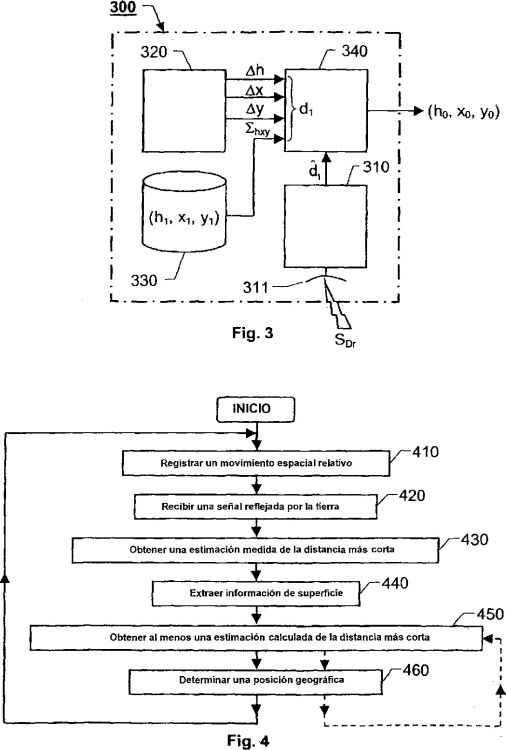
un sistema receptor de radio (310) adaptado para recibir una señal de satélite reflejada por la tierra (SDr) desde al menos una fuente de señal de referencia (120) cuya posición es conocida, y sobre esta base, obtener una estimación medida (^d 1) de la distancia de reflexión más corta a la al menos una fuente de señal de referencia (120), que se caracteriza porque comprende, además, una unidad de medición inercial (320) adaptada para registrar un movimiento espacial relativo (Deltax, Deltay, Deltah) de la disposición (300), una base de datos de terreno (330) que contiene información sobre la superficie (Sigmahxy) que se refieren a las elevaciones (h1) de la superficie terrestre (130) en relación con el nivel medio del mar (z0) en las posiciones geográfica dadas (x1, y1), y una unidad de proceso (340) adaptada para recibir al menos una señal que representa el movimiento espacial relativo (Deltax, Deltay, Delta), extraer la información de superficie (Sigmahxy) de la base de datos de terreno (330), y sobre esta base, obtener al menos una estimación calculada (d1) de la distancia de reflexión más corta a la al menos una fuente de señal de referencia (120), estando adaptada la unidad de proceso (340) para determinar la posición geográfica (x0, y0, h0) sobre la base de la estimación medida (^d 1) y la al menos una estimación calculada (d 1)
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E03018549.
Solicitante: SAAB AB.
Nacionalidad solicitante: Suecia.
Dirección: 581 88 LINKIPING.
Inventor/es: NEREGARD,FREDERIK.
Fecha de Publicación: .
Fecha Solicitud PCT: 18 de Agosto de 2003.
Fecha Concesión Europea: 7 de Octubre de 2009.
Clasificación Internacional de Patentes:
- G01C21/16A
- G01S13/94
Clasificación PCT:
- G01C21/00 FISICA. › G01 METROLOGIA; ENSAYOS. › G01C MEDIDA DE DISTANCIAS, NIVELES O RUMBOS; TOPOGRAFIA; NAVEGACION; INSTRUMENTOS GIROSCOPICOS; FOTOGRAMETRIA O VIDEOGRAMETRIA (medida del nivel de líquidos G01F; radio navegación, determinación de la distancia o velocidad mediante la utilización de efectos de propagación, p. ej. efecto Doppler, tiempo de propagación, de ondas de radio, disposiciones análogas que utilicen otras ondas G01S). › Navegación; Instrumentos de navegación no previstos en los grupos G01C 1/00 - G01C 19/00 (medida de la distancia recorrida sobre el suelo por un vehículo G01C 22/00; control de la posición, curso, altitud o actitud de vehículos G05D 1/00; sistemas de control de tráfico para vehículos rodados incluyendo transmisiones de tráfico de instrucciones de navegación para vehículos controlados G08G 1/0968).
- G01C21/16 G01C […] › G01C 21/00 Navegación; Instrumentos de navegación no previstos en los grupos G01C 1/00 - G01C 19/00 (medida de la distancia recorrida sobre el suelo por un vehículo G01C 22/00; control de la posición, curso, altitud o actitud de vehículos G05D 1/00; sistemas de control de tráfico para vehículos rodados incluyendo transmisiones de tráfico de instrucciones de navegación para vehículos controlados G08G 1/0968). › mediante la integración de la aceleración o la velocidad, p. ej. navegación inercial.
- G01S13/94
- G01S5/14 G01 […] › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 5/00 Establecimiento de la posición mediante la coordinación de dos o más determinaciones de dirección o de líneas de posición; Establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia. › Por determinación de distancias absolutas a una pluralidad de puntos espaciados de emplazamiento conocido.
Clasificación antigua:
- G01C21/00 G01C […] › Navegación; Instrumentos de navegación no previstos en los grupos G01C 1/00 - G01C 19/00 (medida de la distancia recorrida sobre el suelo por un vehículo G01C 22/00; control de la posición, curso, altitud o actitud de vehículos G05D 1/00; sistemas de control de tráfico para vehículos rodados incluyendo transmisiones de tráfico de instrucciones de navegación para vehículos controlados G08G 1/0968).
- G01C21/16 G01C 21/00 […] › mediante la integración de la aceleración o la velocidad, p. ej. navegación inercial.
- G01S5/14 G01S 5/00 […] › Por determinación de distancias absolutas a una pluralidad de puntos espaciados de emplazamiento conocido.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
Navegación de terreno pasiva.
Antecedentes de la invención y técnica anterior
La presente invención se refiere en general a la navegación de terreno sobre la base de una recepción de señal pasiva. Más en particular, la invención se refiere a una disposición de navegación de terreno que no emite señales de acuerdo con la reivindicación 1 y a un procedimiento de navegación de terreno de acuerdo con la reivindicación 5. La invención también se refiere a un programa de ordenador de acuerdo con la reivindicación 8 y a un medio legible por ordenador de acuerdo con la reivindicación 9.
En las últimas décadas, se han desarrollado sistemas de navegación que facilitan la determinación de una posición en comparación espectacular con los anteriores procedimientos conocidos. Estos sistemas de navegación determinan posiciones sobre la base de señales de radio precisas recibidas de una pluralidad de satélites (por lo menos cuatro) y se les conoce comúnmente como sistemas de navegación global por satélite (GNSS). Existen varios estándares de GNSS de los cuales los ejemplos más importantes son el GPS (Sistema de Posicionamiento Global, gestionado por el Gobierno de los EE.UU), GLONASS (Sistema de Satélites de Navegación Global, gestionado por el Ministerio de Defensa de la Federación de Rusia) y el sistema Galileo (el programa Europeo de servicios de navegación globales, que ofrece el servicio EGNOS (Servicio Europeo de Superposición de Navegación Geoestacionario), desarrollado por una colaboración entre la Agencia Espacial Europea y la Unión Europea).
Aunque los GNSS que se han mencionado más arriba generalmente proporcionan información sobre la posición relativamente precisa, la navegación basada en GNSS puede ser problemática si por alguna razón, las señales de radio no pueden ser recibidas de un número suficientemente grande de satélites durante un tiempo prolongado, por ejemplo durante 10 segundos o más. Por ejemplo, una interrupción de la señal de radio de este tipo se puede producir si los vectores de la línea de visión del receptor a uno o más de los satélites a los que el receptor está enclavado se encuentran cubiertos por obstáculos. Las señales de radio de los satélites también pueden quedar bloqueadas (intencionadamente o no) o ser falseadas. Por lo tanto, al menos en aplicaciones militares, a menudo es deseable integrar el receptor GNSS con un INS (Sistema Inercial de Medición) y con un sistema de navegación de terreno, de manera que los sistemas puedan ayudar y dar soporte unos a los otros. De hecho, un receptor GNSS y un INS se complementan bastante bien debido a sus diferencias fundamentales.
Un receptor GNSS y un INS miden diferentes cantidades. Los acelerómetros, que se encuentra en sensores inerciales miden las fuerzas específicas que se transladan a un marco de coordenadas conocido con la ayuda de mediciones derivadas de un girómetro proporcional. A continuación se aplican las leyes de movimiento de Newton para proporcionar información de la velocidad y de la posición. Un GNSS es un sistema de navegación por radio. Por lo tanto, el receptor GNSS mide rangos de satélites a usuarios, y de estas medidas se pueden obtener la posición y la velocidad de un usuario. Además, las mediciones GNSS tienen una estabilidad a largo plazo, pero sin embargo, un comportamiento ruidoso. Por el contrario, las mediciones INS son estables solamente a corto plazo, pero son menos ruidosas que los receptores GNSS. Por otra parte, como se ha mencionado más arriba, puesto que todos los GNSS son sistemas de navegación por radio, son sensibles a las perturbaciones externas de las frecuencias de radio, mientras que el INS no lo es puesto que es un sistema autónomo. De esta manera, una integración de un GNSS y de un INS parece combinar lo mejor de ambos sistemas.
En la navegación de terreno, la posición se estima utilizando una base de datos del terreno y un sensor para medir la distancia de una aeronave al suelo, junto con un sensor para medir el movimiento relativo de la aeronave. De manera similar a las mediciones GNSS, un sistema de navegación de terreno es estable a largo plazo pero sin embargo es relativamente ruidoso.
Ya se conocen varias soluciones para combinar un receptor GNSS con un INS, por ejemplo por medio de la patente norteamericana número 6.449.559. Este documento describe una solución de posicionamiento totalmente acoplado, en el que los datos del INS están integrado con los datos del GPS por medio de un filtro Kalman. De esta manera, se puede lograr una precisión de posicionamiento, lo cual es mejor que lo que sería posible obtener con solamente un receptor GPS.
Como contraste, la patente norteamericana número 6.256.559 describe una solución solamente basada en GPS para determinar la altura de una aeronave por encima del suelo, en la que se miden tanto una señal directa como una señal de un satélite que se refleja en tierra. De esta manera, se logra un altímetro pasivo fiable. Sin embargo, solamente se explican las mediciones de altitud, no el posicionamiento.
Por lo tanto, el estado de la técnica anterior incluye soluciones de navegación donde se combinan un receptor GNSS y un INS, así como una solución de altímetro mediante el cual se registran las señales del satélite reflejadas en la tierra. Sin embargo, todavía no hay una solución de navegación estrictamente pasiva que genere datos fiables de posición también bajo condiciones en las que solamente se encuentran disponibles señales de muy pocos satélites (por ejemplo, de menos de cuatro).
Sumario de la invención
Por lo tanto, el objeto de la presente invención es proporcionar una solución de navegación pasiva, que alivia el problema anterior y de esta manera ofrece datos de posición altamente fiables sobre la base de las señales externas de un número de satélites tan pequeño como uno.
De acuerdo con un aspecto de la invención, el objeto se alcanza mediante una disposición de navegación de terreno pasiva que incluye un sistema receptor de radio, una unidad de medición inercial, una base de datos del terreno y una unidad de proceso. El sistema receptor de radio está adaptado para recibir una señal de satélite reflejada por la tierra desde al menos una fuente de señal de referencia cuya posición es conocida, por ejemplo, un satélite de navegación, un avión o una estación base de radio. Sobre la base de esta señal, el sistema receptor de radio obtiene una estimación medida de la distancia de reflexión más corta al satélite. La unidad de medición inercial está adaptada para registrar un movimiento espacial relativo de la disposición y producir al menos una señal que refleje este movimiento. La base de datos del terreno contiene información de la superficie que se refiere a las elevaciones de la superficie de la tierra en relación con el nivel medio del mar en las posiciones geográficas dadas. La unidad de proceso está adaptada para recibir la al menos una señal que refleja el movimiento espacial relativo. La unidad de proceso también está adaptada para extraer la información de superficie de la base de datos del terreno. Sobre la base de esta información y de la señal de información del movimiento, la unidad de proceso obtiene al menos una estimación calculada de la distancia de reflexión más corta a la al menos una fuente de señal de referencia. La unidad de proceso está adaptada además para determinar una posición geográfica sobre la base de las estimaciones medidas y calculadas de la distancia de reflexión más corta. Preferiblemente, se calcula una pluralidad de estimaciones, y de forma iterativa para cada estimación se realiza un posicionamiento correspondiente.
Una ventaja importante que se obtiene de esta manera es que se consiguen una precisión relativamente alta así como una buena fiabilidad. Al mismo tiempo, el régimen de navegación es completamente silencioso, es decir, la disposición no emite ninguna señal que la pueda revelar. Por lo tanto, la disposición es muy adecuada para aplicaciones militares en las que, en general, es deseable una operación sigilosa.
De acuerdo con una realización preferida de este aspecto de la invención, la unidad de proceso está adaptada para determinar la posición geográfica sobre la base de una distribución de probabilidad. Esta distribución describe la probabilidad de que la disposición se encuentre en una posición geográfica específica siempre que se obtenga una estimación medida particular respectiva de una estimación calculada particular de la distancia de reflexión más corta. Así, una descripción probabilística de la relación entre...
Reivindicaciones:
1. Una disposición de navegación de terreno pasiva (300) que comprende:
un sistema receptor de radio (310) adaptado para recibir una señal de satélite reflejada por la tierra (SDr) desde al menos una fuente de señal de referencia (120) cuya posición es conocida, y sobre esta base, obtener una estimación medida (
una unidad de medición inercial (320) adaptada para registrar un movimiento espacial relativo (?x, ?y, ?h) de la disposición (300),
una base de datos de terreno (330) que contiene información sobre la superficie (Shxy) que se refieren a las elevaciones (h1) de la superficie terrestre (130) en relación con el nivel medio del mar (z0) en las posiciones geográfica dadas (x1, y1), y
una unidad de proceso (340) adaptada para recibir al menos una señal que representa el movimiento espacial relativo (?x, ?y, ?h), extraer la información de superficie (Shxy) de la base de datos de terreno (330), y sobre esta base, obtener al menos una estimación calculada (d1) de la distancia de reflexión más corta a la al menos una fuente de señal de referencia (120), estando adaptada la unidad de proceso (340) para determinar la posición geográfica (x0, y0, h0) sobre la base de la estimación medida (
2. Una disposición de navegación de terreno pasiva (300) de acuerdo con la reivindicación 1, que se caracteriza porque la unidad de proceso (340) está adaptada para determinar la posición geográfica (x0, y0, h0) sobre la base de una distribución de probabilidad que describe una probabilidad de que la disposición (300) se encuentre situada en una posición geográfica específica (x0, y0, h0), siempre que se obtenga una estimación medida particular (d1) respectiva de una estimación calculada particular (
3. Una disposición de navegación de terreno pasiva (300) de acuerdo con la reivindicación 2, que se caracteriza porque la distribución de probabilidad es una función de probabilidad condicional.
4. Una disposición de navegación de terreno pasiva (300) de acuerdo con una cualquiera de las reivindicaciones precedentes, que se caracteriza porque comprende un altímetro basado en barómetro adaptado para registrar una medición de la altitud (h0) en relación con el nivel medio del mar (z0), estando adaptada la unidad de medición inercial (320) para recibir la medición de altitud (h0), y sobre esta base, calibrar sus mediciones del movimiento espacial relativo (?x, ?y, ?h).
5. Un procedimiento de navegación pasiva que comprende las etapas de: recibir una señal de satélite reflejada por la tierra (SDr) desde al menos una fuente de señal de referencia (120), cuya posición es conocida, obtener una estimación medida (
extraer la información de superficie (Shxy) relativa a una elevación (h1) de la superficie de la tierra (130) en relación con el nivel medio del mar (z0) en la al menos una posición geográfica (x1, y1),
obtener por lo menos una estimación calculada (d1) de la distancia de reflexión más corta a la al menos una fuente de señal de referencia (120) sobre la base del movimiento espacial relativo (?x, ?y, ?h) y de la información de superficie (Shxy), y
determinar una posición geográfica (x0, y0, h0) sobre la base de la estimación medida (
6. Un procedimiento de acuerdo con la reivindicación 5, que se caracteriza por determinar la posición geográfica (x0, y0, h0) sobre la base de una distribución de probabilidad que describe la probabilidad de que la señal de satélite (SDr) reflejada por la tierra se mide en una posición geográfica específica (x0, y0, h0), siempre que se obtenga una estimación medida particular (
7. Un procedimiento de acuerdo con la reivindicación 6, que se caracteriza por las etapas de: obtener la al menos una estimación calculada (d1) de la distancia de reflexión más corta respecto al menos a dos posiciones geográfica provisionales (x0, y0, h0),
calcular la probabilidad de que la señal de satélite (SDr) reflejada por la tierra se mida en cada una de las citadas posiciones geográficas provisionales (x'0, y'0, h'0), y
determinar la posición geográfica (x0, y0, h0) sobre la base de una estimación calculada (d1) de la distancia de reflexión más corta, que está asociada a una probabilidad que supera un valor umbral.
8. Un procedimiento de acuerdo con una cualquiera de las reivindicaciones 6 ó 7, que se caracteriza porque la distribución de probabilidad es una función Bayesiana.
9. Un programa informático que se puede cargar directamente en la memoria interna de un ordenador, que incluye programas lógicos para ejecutar las etapas de cualquiera de las reivindicaciones 5-8, cuando dicho programa se ejecuta en el ordenador.
10. Un medio legible por ordenador que tiene un programa grabado en el mismo, en el que el programa hace que un ordenador ejecute los etapas de cualquiera de las reivindicaciones 5-8.
Patentes similares o relacionadas:
Dispositivo de radar aerotransportado multifunción de banda ancha con una amplia cobertura angular que permite la detección y el seguimiento, del 11 de Febrero de 2015, de THALES: Dispositivo de radar aerotransportado que permite la detección de blancos para la implementación de una función de detección y de evitación de obstáculos, que comprende […]
Sistema para evitar la colisión entre una aeronave y un obstáculo, del 22 de Octubre de 2014, de VESTAS WIND SYSTEMS A/S: Un aparato para detectar y advertir a una aeronave acerca de un obstáculo aéreo, que comprende: una unidad de campo situada, en uso, en la proximidad […]
Unidad de campo de radar para sistema que evita la colisión entre una aeronave y un obstáculo, del 4 de Junio de 2014, de VESTAS WIND SYSTEMS A/S: Una unidad de campo para detectar y avisar a una aeronave acerca de un obstáculo, comprendiendo la unidad de campo una unidad central de procesamiento […]
INTERFAZ HOMBRE-MÁQUINA PARA APOYO A PILOTOS DURANTE EL DESPEGUE O ATERRIZAJE DE UN APARATO DE VUELO CON VISIÓN EXTERIOR REDUCIDA, del 5 de Diciembre de 2011, de EADS DEUTSCHLAND GMBH: Interfaz hombre-máquina, que para el apoyo a pilotos durante el despegue o aterrizaje de un aparato de vuelo en condiciones de visión exterior reducida representa […]
 CORRECCION DE MEDICION ADAPTATIVA DURANTE LA MEDICION REMOTA DE DISTANCIAS, del 29 de Octubre de 2010, de SAAB AB: Un procedimiento para el control de navegación de una nave mediante medición remota de distancia, que comprende las etapas de:
medir […]
CORRECCION DE MEDICION ADAPTATIVA DURANTE LA MEDICION REMOTA DE DISTANCIAS, del 29 de Octubre de 2010, de SAAB AB: Un procedimiento para el control de navegación de una nave mediante medición remota de distancia, que comprende las etapas de:
medir […]
 SISTEMA Y PROCEDIMIENTO DE NAVEGACION DE UN VEHICULO, del 16 de Noviembre de 2009, de SAAB AB: Un sistema de navegación de un vehículo conforme al contorno de una región de la superficie sobre la que se mueve, que comprende a bordo del vehículo un altímetro radar […]
SISTEMA Y PROCEDIMIENTO DE NAVEGACION DE UN VEHICULO, del 16 de Noviembre de 2009, de SAAB AB: Un sistema de navegación de un vehículo conforme al contorno de una región de la superficie sobre la que se mueve, que comprende a bordo del vehículo un altímetro radar […]
PROCESO Y DISPOSITIVO DE ANTICOLISIONES CON EL TERRENO PARA AERONAVES, del 16 de Mayo de 1997, de DASSAULT ELECTRONIQUE: UNA MEMORIA DE MASAS ALMACENA UNA BASE DE DATOS (BDT) QUE REPRESENTA AL MENOS UNA PARTE SUSTANCIAL DEL GLOBO TERRESTRE, SEGUN UNA MALLA DE VARIOS NIVELES, […]
 PROCESO DE PRESENTACION DE INFORMACIONES CARTOGRAFICAS Y DE ZONAS AERONAUTICAS SOBRE LA PANTALLA DE UNA AERONAVE, del 1 de Septiembre de 2008, de THALES: Proceso de síntesis, sobre una pantalla de aeronave, de al menos una primera ventana que representa una imagen cartográfica en vista […]
PROCESO DE PRESENTACION DE INFORMACIONES CARTOGRAFICAS Y DE ZONAS AERONAUTICAS SOBRE LA PANTALLA DE UNA AERONAVE, del 1 de Septiembre de 2008, de THALES: Proceso de síntesis, sobre una pantalla de aeronave, de al menos una primera ventana que representa una imagen cartográfica en vista […]