METODO Y SISTEMA DE RECUBRIMIENTO POR PULVERIZACION PARA CUERPOS DE LATA.
Un sistema (10) para el recubrimiento por pulverización de cuerpos de lata (12),
que comprende:
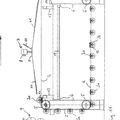
una cabina de pulverización (14) que tiene una entrada (16) y una salida (18), comprendiendo la cabina de pulverización al menos un brazo robótico (20) y una pluralidad de pistolas de aplicación por pulverización (22), siendo funcional el al menos un brazo robótico para mover una pluralidad de cuerpos de lata como un grupo (40) hasta una zona de aplicación de polvo (42) donde se plica polvo al interior y el exterior de la pluralidad de cuerpos de lata por la pluralidad de pistolas de aplicación por pulverización;
un sistema de transporte (50) para recibir la pluralidad de cuerpos de lata como un grupo desde el al menos un brazo robótico; y
un horno (60) que recibe la pluralidad de cuerpos de lata desde el sistema de transporte y funcional para curar el polvo aplicado a la pluralidad de cuerpos de lata
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E07252414.
Solicitante: REXAM BEVERAGE CAN EUROPE LIMITED.
Nacionalidad solicitante: Reino Unido.
Dirección: 100 CAPABILITY GREEN,LUTON, BEDFORDSHIRE LU1 3LG.
Inventor/es: TAYLOR, STEVEN, MOSER,KLAAS, SWEENEY,PAT.
Fecha de Publicación: .
Fecha Solicitud PCT: 14 de Junio de 2007.
Fecha Concesión Europea: 20 de Enero de 2010.
Clasificación Internacional de Patentes:
- B05B13/02B
- B05B13/06A
- B05B15/12C
Clasificación PCT:
- B05B13/02 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B05 PULVERIZACION O ATOMIZACION EN GENERAL; APLICACION DE MATERIALES FLUIDOS A SUPERFICIES, EN GENERAL. › B05B APARATOS DE PULVERIZACION; APARATOS DE ATOMIZACION; TOBERAS O BOQUILLAS (mezcladores de pulverización con toberas B01F 5/20; procedimientos para aplicar líquidos u otros materiales fluidos a superficies por pulverización B05D). › B05B 13/00 Máquinas o instalaciones para aplicar líquidos u otras materias fluidas sobre la superficie de objetos o de materiales por pulverización, no cubiertas por los grupos B05B 1/00 - B05B 11/00 (procedimientos para aplicar líquidos u otras materias fluidas a las superficies en general B05D; medios para suministrar o refluir un líquido u otro material fluido con este fin, ver el apropiado de entre los grupos B05B 1/00 - B05B 12/00). › Medios para soportar la pieza; Disposición o montaje de cabezas de pulverización; Adaptación o disposición de los medios para mover las piezas (B05B 13/06 tiene prioridad).
- B05B13/06 B05B 13/00 […] › concebidas especialmente para tratar el interior de cuerpos huecos (cabezas de pulverización B05B 1/00 - B05B 7/00).
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
Método y sistema de recubrimiento por pulverización para cuerpos de lata.
Antecedentes
La invención se refiere en líneas generales a métodos para fabricar latas, y más particularmente se refiere a un método y sistema para recubrir una lata metálica con polvo.
Las latas, tales como latas para alimentos y latas que contienen una bebida, típicamente se fabrican a partir de metales tales como aleación de acero o aluminio. Durante la fabricación de la lata, los cuerpos de lata se someten a un proceso en el que se aplica un recubrimiento al interior del cuerpo de lata. El recubrimiento interior se aplica al cuerpo de lata para proteger los contenidos de la lata de la contaminación o reacción con el material de la lata, que puede causar un cambio en el sabor y/o color de los contenidos. Habitualmente también se realiza una etapa adicional para recubrir el exterior del cuerpo de lata. El recubrimiento sobre el exterior del recipiente puede ser para proteger el recipiente del medioambiente (por ejemplo, en el caso de latas de acero para inhibir la formación de óxido), y para suministrar una base para la posterior impresión de color.
Desde hace algún tiempo se han conocido métodos para recubrir objetos metálicos usando polvos. Los ejemplos de la técnica anterior relacionada con el recubrimiento por pulverización de latas y objetos metálicos similares, y aparatos usados en el recubrimiento por pulverización, incluyen los siguientes: Smith et al., patente de Estados Unidos 4.094.760; Wilson et al., patente de Estados Unidos 5.997.643; Mulder et al., patente de Estados Unidos RE 33.482; Knobbe et al., patente de Estados Unidos 5.173.325; Nussbaumer et al., patente de Estados Unidos 6.176.927; Mulder et al., patente de Estados Unidos 5.612.096; Peck, patente de Estados Unidos 4.180.844 y Payne, patente de Estados Unidos 4.291.640. Los polvos pueden cargarse electrostáticamente para obtener de forma más fiable la adhesión del polvo al cuerpo de lata. Véase, por ejemplo, Davidson et al., patente de Estados Unidos 4.210.507. Se describen ejemplos de composiciones en polvo en Pregmon, patente de Estados Unidos 3.882.064; Jung et al., patente de Estados Unidos 6.472.472, y Srinivasan, patente de Estados Unidos 5.994.462.
A pesar de la llegada de la tecnología de recubrimiento por pulverización, se cree que la industria de fabricación de latas para bebidas no la ha adoptado de forma extensiva. Existe una diversidad de razones para esto, incluyendo dificultades para aplicar la técnica a la velocidad necesaria en plantas de fabricación de elevado volumen, y los costes añadidos para el equipo de recubrimiento por pulverización. Tradicionalmente, al menos en la técnica de latas para bebidas, los recubrimientos aplicados a las latas durante la fabricación se aplican en forma de pulverizaciones que contienen compuestos químicos orgánicos volátiles. Existe una necesidad en la técnica de un método y sistema más respetuosos con el medioambiente para recubrir cuerpos de lata usando polvo, que evite el uso de compuestos químicos volátiles o la liberación de dichos compuestos químicos al medioambiente, pero que también sea rentable cuando se aplica en una situación de producción en masa.
Sumario
Esta descripción proporciona métodos y sistemas para recubrir, de forma respetuosa con el medioambiente y rentable, latas durante la fabricación con polvo. Los métodos y sistemas son particularmente adecuados para la aplicación en plantas de fabricación de latas de elevado volumen tales como plantas manejadas por fabricantes de latas de aluminio para bebidas. Los métodos son adecuados para latas para alimentos y bebidas en general, y en particular para latas de aluminio para bebidas.
En un primer aspecto, se proporciona un sistema para el recubrimiento por pulverización de cuerpos de lata. El sistema incluye una cabina de pulverización que tiene una entrada y una salida. La cabina de pulverización incluye al menos un brazo robótico y una pluralidad de pistolas de aplicación por pulverización. El brazo robótico es funcional para mover una pluralidad de cuerpos de lata como un grupo a una zona de aplicación de polvo donde se aplica el polvo al interior y el exterior de los cuerpos de lata por pistolas de aplicación por pulverización. El sistema incluye adicionalmente un sistema de transporte para recibir los cuerpos de lata como un grupo desde el brazo robótico. El sistema incluye adicionalmente un horno que recibe la pluralidad de cuerpos de lata desde el sistema de transporte. El horno es funcional para curar el polvo que se ha aplicado a los cuerpos de lata.
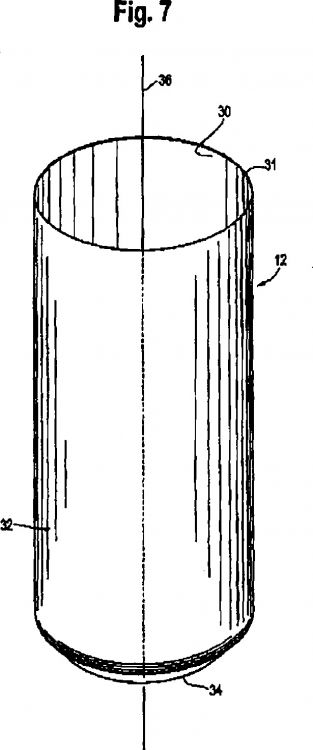
En una configuración, los cuerpos de lata incluyen una parte final cerrada, tal como, por ejemplo, en el caso de latas para bebidas, la parte de bóveda que forma el fondo del cuerpo de lata. El brazo robótico funciona contactando con el grupo de cuerpos de lata mediante el vacío aplicado por el brazo robótico a la parte final cerrada de cada uno de los cuerpos de lata. Una vez conectadas al brazo de este modo, el brazo mueve las latas como un grupo hasta la zona de aplicación de polvo y después al sistema de transporte. La liberación el vacío libera el grupo de cuerpos de lata del brazo y permite colocarlos sobre el sistema de transporte. El brazo se mueve hacia atrás para coger otro grupo de latas. Después, se aplica el polvo a las latas en la localización donde las latas estaban unidas por vacío al brazo robótico.
En una posible configuración, el sistema incluye al menos dos brazos robóticos, cada uno de los cuales funciona sucesivamente moviendo una pluralidad de cuerpos de lata como un grupo hasta la zona de aplicación de polvo y después hasta el sistema de transporte. Por ejemplo, en una configuración con dos brazos robóticos, un brazo robótico sujeta un grupo de cuerpos de lata en la zona de pulverización según se está aplicando el polvo a los cuerpos de lata, y después mueve los cuerpos de lata hasta el sistema de transporte. Mientras tanto, el otro brazo robótico llega a conectarse a un nuevo grupo cuerpos de lata y después funciona moviendo el nuevo grupo hasta la zona de aplicación de polvo. Tener dos brazos robóticos que funcionan de este modo sirve para aumentar el rendimiento del sistema de recubrimiento por pulverización.
El brazo robótico puede construirse adicionalmente con una característica por la cual el brazo robótico funciona rotando cada uno de la pluralidad de cuerpos de lata alrededor del eje longitudinal de cada lata mientras se está aplicando el polvo a los cuerpos de lata por las pistolas de pulverización.
En otro aspecto, se describe una cabina de pulverización mejorada de un sistema de recubrimiento por pulverización para latas. La cabina de pulverización incluye un brazo robótico funcional para sujetar y transportar una pluralidad de cuerpos de lata como un grupo dentro de la cabina de pulverización, una primera serie de pistolas de pulverización funcional para aplicar un polvo al exterior de los cuerpos de lata mientras los cuerpos de lata están sujetos por el brazo robótico, una segunda serie de pistolas de pulverización funcional para aplicar un polvo al interior de los cuerpos de lata mientras los cuerpos de lata están sujetos por el brazo robótico, y una tercera serie de pistolas de pulverización funcional para aplicar un polvo a la localización sobre los cuerpos de lata donde los cuerpos de lata estaban sujetos por el brazo robótico. En una posible configuración de la cabina de pulverización, la cabina incluye un sistema de transporte que recibe la pluralidad de cuerpos de lata desde el brazo robótico después de la aplicación del polvo de la primera y segunda series de pistolas de pulverización. La tercera serie de pistolas de pulverización es funcional para pulverizar polvo sobre los cuerpos de lata después de que el brazo robótico haya depositado los cuerpos de lata sobre el sistema de transporte. En una variación adicional, el brazo robótico viaja hacia atrás y hacia delante para depositar las latas sobre la cinta transportadora en una dirección lineal. La dirección del movimiento del sistema de transporte es sustancialmente perpendicular a la dirección lineal de recorrido del brazo robótico. Esta característica permite un estrecho espaciado para los grupos de latas después de colocarse sobre el sistema de transporte.
En otro aspecto, se describe un método de recubrimiento por pulverización de cuerpos de lata. El método incluye las etapas de: a) mover una pluralidad de cuerpos de lata hasta...
Reivindicaciones:
1. Un sistema (10) para el recubrimiento por pulverización de cuerpos de lata (12), que comprende:
una cabina de pulverización (14) que tiene una entrada (16) y una salida (18), comprendiendo la cabina de pulverización al menos un brazo robótico (20) y una pluralidad de pistolas de aplicación por pulverización (22), siendo funcional el al menos un brazo robótico para mover una pluralidad de cuerpos de lata como un grupo (40) hasta una zona de aplicación de polvo (42) donde se plica polvo al interior y el exterior de la pluralidad de cuerpos de lata por la pluralidad de pistolas de aplicación por pulverización;
un sistema de transporte (50) para recibir la pluralidad de cuerpos de lata como un grupo desde el al menos un brazo robótico; y
un horno (60) que recibe la pluralidad de cuerpos de lata desde el sistema de transporte y funcional para curar el polvo aplicado a la pluralidad de cuerpos de lata.
2. El sistema (10) de la reivindicación 1, en el que los cuerpos de lata (12) incluyen una parte final cerrada (34) y en el que el al menos un brazo robótico (20) conecta con la pluralidad de cuerpos de lata mediante succión aplicada a la parte final cerrada de cada uno de los cuerpos de lata.
3. El sistema (10) de la reivindicación 2, en el que la cabina de pulverización (14) incluye adicionalmente una zona (54) donde se aplica polvo a la parte final cerrada (34) de los cuerpos de lata (12) después de haberse liberado los cuerpos de lata del brazo robótico (20) sobre el sistema de transporte (50).
4. El sistema (10) de la reivindicación 1, comprendiendo adicionalmente el sistema al menos una zona de succión (70A, 70B) próxima al sistema de transporte (50) donde se recupera el exceso de polvo de los cuerpos de lata (12) después de haber aplicado el polvo a los cuerpos de lata en la zona de aplicación de polvo (42).
5. El sistema (10) de la reivindicación 1, comprendiendo el sistema al menos dos brazos robóticos (20), cada uno de los cuales funciona moviendo una pluralidad de cuerpos de lata (12) como un grupo (40) hasta la zona de aplicación de polvo (42) y después hasta el sistema de transporte (50).
6. El sistema (10) de la reivindicación 1, en el que el sistema de transporte (50) incluye un primer componente que comprende una cinta perforada (64) que recibe el grupo (40) de latas (12) desde el al menos un brazo robótico (20), donde el brazo robótico se mueve en una dirección lineal, y donde la dirección del movimiento del primer componente del sistema de transporte es sustancialmente perpendicular a la dirección lineal del movimiento del brazo robótico.
7. El sistema (10) de la reivindicación 6, en el que el sistema de transporte (50) incluye un segundo componente que comprende una cinta de limpieza perforada (66) que tiene áreas de succión de recuperación de polvo (70A, 70B), recibiendo el segundo componente el grupo (40) de cuerpos de lata (12) del primer componente, y un tercer componente que comprende una cinta transportadora (68) para transportar los cuerpos de lata a través del horno (60).
8. El sistema (10) de la reivindicación 7, en el que la cinta transportadora (68) que transporta los cuerpos de lata (12) a través del horno (60) comprende una cinta perforada.
9. El sistema (10) de la reivindicación 1, en el que el al menos un brazo robótico (20) se mueve en el exterior de la entrada (16) hasta la cabina de pulverización (14) para coger una pluralidad de latas (12) como un grupo (40) y moverlas a través de la entrada de la cabina de pulverización hasta la zona de aplicación de polvo (42) y desde la zona de aplicación de polvo hasta el sistema de transporte (50).
10. El sistema (10) de la reivindicación 1, en el que el al menos un brazo robótico (20) funciona rotando cada uno de la pluralidad de cuerpos de lata (12) mientras se está aplicando polvo a los cuerpos de lata por las pistolas de pulverización (22).
11. El sistema (10) de la reivindicación 1, en el que la pluralidad de pistolas de aplicación por pulverización (22) comprende:
una primera serie (24) de pistolas de pulverización funcionales para aplicar un polvo al exterior de la pluralidad de cuerpos de lata (12) mientras la pluralidad de cuerpos de lata está sujeta por el al menos un brazo robótico (20);
una segunda serie (26) de pistolas de pulverización funcional para aplicar un polvo al interior de la pluralidad de cuerpos de lata; y
una tercera serie (28) de pistolas de pulverización funcional para aplicar un polvo a la localización de la pluralidad de cuerpos de lata donde la pluralidad de cuerpos de lata estaba sujeta por el al menos un brazo robótico.
12. El sistema (10) de la reivindicación 11, en el que
un sistema de transporte (50) es para recibir la pluralidad de cuerpos de lata (12) del brazo robótico (20) después de la aplicación de polvo a los cuerpos de lata por la primera (24) y la segunda (26) series de pistolas de pulverización.
13. El sistema (10) de la reivindicación 12, en el que la cabina de pulverización (14) comprende adicionalmente un segundo brazo robótico (20), siendo funcional el segundo brazo robótico para sujetar y transportar una pluralidad de cuerpos de lata (12) como un grupo (40) dentro de la cabina de pulverización, y donde el primer y el segundo brazos se alternan para transportar los grupos de cuerpos de lata hasta la localización de la primera (24) y la segunda (26) series de pistolas de pulverización.
14. Una cabina de pulverización (14) para un sistema de recubrimiento por pulverización (10) para latas, que comprende:
un brazo robótico (20) funcional para sujetar y transportar una pluralidad de cuerpos de lata (12) como un grupo (40) dentro de la cabina de pulverización;
una primera serie (24) de pistolas de pulverización funcional para aplicar un polvo al exterior de la pluralidad de cuerpos de lata mientras la pluralidad de cuerpos de lata está sujeta por el brazo robótico;
una segunda serie (26) de pistolas de pulverización funcional para aplicar un polvo al interior de la pluralidad de cuerpos de lata; y
una tercera serie (28) de pistolas de pulverización funcional para aplicar un polvo a la localización de la pluralidad de cuerpos de lata donde la pluralidad de cuerpos de lata estaba sujeta por el brazo robótico.
15. La cabina de pulverización (14) de la reivindicación 14, que comprende adicionalmente:
un sistema de transporte (50) que recibe la pluralidad de cuerpos de lata (12) del brazo robótico (20) después de la aplicación de polvo a los cuerpos de lata por la primera y la segunda series (24, 26) de pistolas de pulverización.
16. La cabina de pulverización (14) de la reivindicación 15, en la que el brazo robótico (20) viaja en una dirección lineal, y en la que la dirección del movimiento del sistema de transporte (50) es sustancialmente perpendicular a la dirección lineal del recorrido del brazo robótico.
17. La cabina de pulverización (14) de la reivindicación 15, en la que el sistema de transporte comprende una cinta perforada (64).
18. La cabina de pulverización (14) de la reivindicación 15, comprendiendo adicionalmente la cabina de pulverización un segundo brazo robótico (20), siendo funcional el segundo brazo robótico para sujetar y transportar una pluralidad de cuerpos de lata (12) como un grupo (40) dentro de la cabina de pulverización, y donde el primer y el segundo brazos se alternan para transportar los grupos de cuerpos de lata hasta la localización de la primera y la segunda series (24, 26) de pistolas de pulverización.
19. Un método de recubrimiento por pulverización de cuerpos de lata (12) que comprende las etapas de:
a) mover una pluralidad de cuerpos de lata hasta una localización exterior de una cabina de pulverización (14);
b) mover la pluralidad de cuerpos de lata como un grupo (40) al interior de la cabina de pulverización y hasta una zona de aplicación de polvo (42) dentro de la cabina de pulverización;
c) aplicar un polvo a los cuerpos de lata;
d) mover el grupo de cuerpos de lata hasta un sistema de transporte (50); y
e) aplicar polvo adicional al grupo de cuerpos de lata después de colocar los cuerpos de lata sobre el sistema de transporte.
20. El método de la reivindicación 19, que comprende adicionalmente la etapa de:
f) mover el grupo (40) de cuerpos de lata (12) desde la cabina de pulverización (14) hasta un horno (60) para curar el polvo aplicado a los cuerpos de lata.
21. El método de la reivindicación 19, en el que durante la etapa c) se realiza la etapa adicional de rotar cada una de las latas (12) del grupo (40) alrededor de un eje.
22. El método de la reivindicación 19, en el que las latas (12) comprenden latas para bebidas que tienen una parte de bóveda que cierra un extremo de la lata, y durante las etapas b), c) y d) el grupo (40) de latas está sujeto por un brazo robótico (20) mediante succión aplicada por el brazo robótico a la parte de bóveda de la lata.
23. El método de la reivindicación 22, en el que en la etapa a) las latas (12) están colocadas en la localización exterior a la cabina de pulverización (14) en una configuración predeterminada que se adapta a una configuración del brazo robótico (20).
24. El método de la reivindicación 23, en el que la configuración predeterminada comprende una configuración de filas y columnas de latas (12), donde hay dos columnas y N filas, y donde N es mayor de o igual a dos.
25. El método de la reivindicación 24, en el que N es mayor de 10.
26. El método de la reivindicación 19, en el que la etapa a) comprende proporcionar una serie de cuerpos de lata (12) a una localización exterior de una cabina de pulverización (14) en una configuración predeterminada;
la etapa b) comprende mover un brazo robótico (20) a la localización, conectar el brazo robótico a la serie de cuerpos de lata (12) y mover el brazo robótico y los cuerpos de lata conectados al interior de la cabina de pulverización;
la etapa c) comprende mientras se sujeta la serie de cuerpos de lata con el brazo robótico, aplicar un polvo a los cuerpos de lata dentro de la cabina de pulverización;
la etapa d) comprende adicionalmente liberar el grupo de cuerpos de lata del brazo robótico;
la etapa e) comprende aplicar polvo adicional al grupo de cuerpos de lata en la localización donde los cuerpos de lata estaban conectados al brazo robótico, y donde el método comprende adicionalmente la etapa f) repetir las etapas a), b), c), d) y e) como anteriormente.
27. El método de la reivindicación 26, en el que la configuración predeterminada comprende una configuración de filas y columnas de latas (12), donde hay dos columnas y N filas, y donde N es mayor de o igual a dos.
28. El método de la reivindicación 27, en el que N es mayor de 10.
29. El método de la reivindicación 26, en el que los cuerpos de lata (12) tienen superficies interior y exterior y en el que en la etapa c) el polvo se aplica a las superficies interior y exterior.
30. El método de la reivindicación 19, en el que los cuerpos de lata (12) comprenden cuerpos de lata para bebidas.
31. El método de la reivindicación (26), en el que los cuerpos de lata (12) comprenden cuerpos de lata para bebidas.
Patentes similares o relacionadas:
 DISPOSITIVO Y PROCEDIMIENTO PARA LA APLICACION SIN CONTAMINACION DE LIQUIDOS SOBRE SUSTRATOS EN EL CURSO DE LA FABRICACION DE PANELES DE SANDWICH, del 21 de Mayo de 2010, de SIEMPELKAMP HANDLING SYSTEME GMBH: Instalación para la aplicación de líquido sobre paneles (1a, 1b), que son transportados sucesivamente a lo largo de una trayectoria de transporte , […]
DISPOSITIVO Y PROCEDIMIENTO PARA LA APLICACION SIN CONTAMINACION DE LIQUIDOS SOBRE SUSTRATOS EN EL CURSO DE LA FABRICACION DE PANELES DE SANDWICH, del 21 de Mayo de 2010, de SIEMPELKAMP HANDLING SYSTEME GMBH: Instalación para la aplicación de líquido sobre paneles (1a, 1b), que son transportados sucesivamente a lo largo de una trayectoria de transporte , […]
Máquina de pulverización servoaccionada y procedimiento de operación, del 1 de Julio de 2020, de CROWN PACKAGING TECHNOLOGY, INC: Un procedimiento de operación de una pluralidad de máquinas de pulverización interna de latas (300, 301, 30X), cada una de las cuales usa un servomotor (7, […]
Revestimiento de latas por pulverización, del 1 de Julio de 2020, de CROWN PACKAGING TECHNOLOGY, INC: Una máquina de pulverización de cuerpos de lata que comprende: un dispositivo de giro de cuerpo de lata ; una pistola de pulverización para pulverizar […]
APARATO DE RECUBRIMIENTO CON BOQUILLAS DE ROCIADO MÓVILES, del 23 de Enero de 2020, de STE TECPHARM, S.L: Un aparato de recubrimiento con boquillas de rociado móviles, que comprende un tambor rotatorio y un grupo de posicionado […]
Aplicador de revestimiento sellador con mandril de vacío, del 8 de Enero de 2020, de CUSTOM MACHINING CORPORATION: Mandril de vacío adaptado para la montura en un ensamblaje de torreta inferior , el ensamblaje de torreta inferior es parte de un aplicador de revestimiento […]
Recubridora de tambor para la aplicación de una capa superficial sobre materiales a granel, del 6 de Noviembre de 2019, de GLATT MASCHINEN- UND APPARATEBAU AG: Recubridora de tambor para la aplicación de una capa superficial sobre materiales a granel, que comprende - un tambor soportado de forma giratoria para recibir […]
Dispositivo para almacenar y transportar componentes de revestimiento de vehículos, especialmente parachoques, del 6 de Noviembre de 2019, de SMP Deutschland GmbH: Dispositivo para almacenar y transportar componentes de revestimiento de vehículos, especialmente parachoques, que comprende - una primera sección de alojamiento […]
Instalación para la pintura horizontal de puertas conformadas, del 23 de Octubre de 2019, de CEFLA SOCIETA' COOPERATIVA: Procedimiento para la pintura horizontal de objetos que tienen dos lados predominantes, en el que la pintura del primer lado y la pintura del segundo lado […]