METODO DE DETECCION DE PRESENCIA DE OBJETOS MOVILES.
Compren e la utilización de un sistema de detección para:
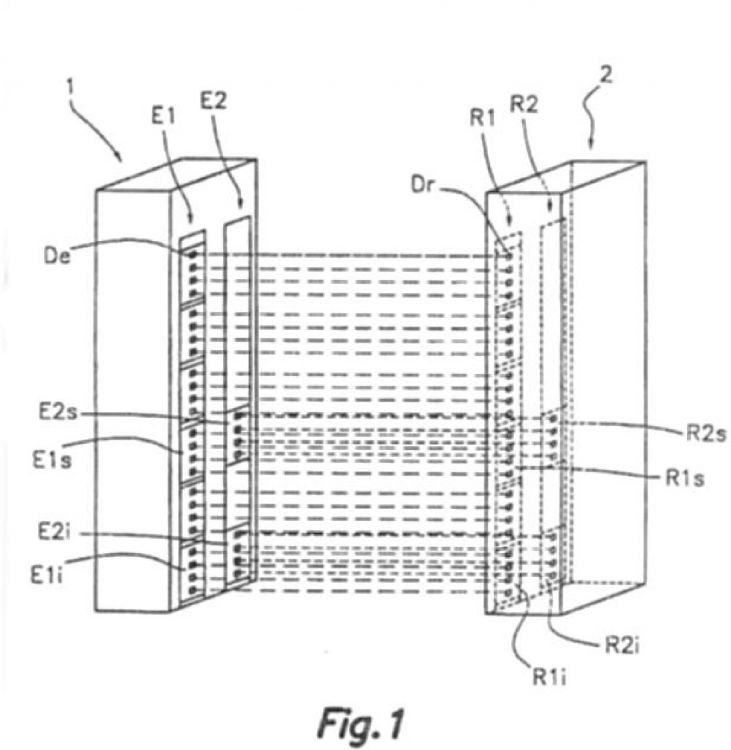
- emitir una serie de haces de radiación electromagnética mediante unos dispositivos emisores (De) de una unidad transmisora (1) alineados formando como mínimo una columna I emisora (E1),
- recibir dichos haces de radiación electromagnética por parte de unos dispositivos receptores (Dr) de una unidad receptora (2) alineados formando como mínimo una columna receptora (R1), enfrentada a la columna emisora (E1),
- detectar la intercepción de dichos haces mediante la detección de la ausencia de recepción por parte de cómo mínimo uno de los dispositivos receptores (Dr), y generar una señal de detección de presencia de un objeto móvil en función de que el número de dispositivos receptores (Dr) que detecten una ausencia de recepción de radiación electromagnética sea superior a un número predeterminado mayor que dos
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P200701682.
Solicitante: AUTOPISTAS CONCESIONARIA ESPAOLA S.A.
Nacionalidad solicitante: España.
Provincia: BARCELONA.
Inventor/es: RIOLA,JOAN MARTI, GUARDIA,JOSEP.
Fecha de Solicitud: 8 de Junio de 2007.
Fecha de Publicación: .
Fecha de Concesión: 5 de Octubre de 2010.
Clasificación Internacional de Patentes:
- G08G1/04 FISICA. › G08 SEÑALIZACION. › G08G SISTEMAS DE CONTROL DE TRÁFICO (control de tráfico ferroviario, seguridad del tráfico ferroviario B61L; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para el control del tráfico G01S 13/91, G01S 15/88, G01S 17/88; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para anticolisión G01S 13/93, G01S 15/93, G01S 17/93; control de posición, rumbo, altitud o actitud de vehículos terrestres, de agua, el aire o el espacio, no es específico para un entorno de tráfico G05D 1/00). › G08G 1/00 Sistemas de control del tráfico para vehículos en carretera (disposición de las señales de tráfico o las señales de carretera E01F 9/00). › que utilizan detectores ópticos o ultrasónicos.
- G08G1/056 G08G 1/00 […] › con disposiciones para distinguir la dirección de circulación.
Clasificación PCT:
Fragmento de la descripción:
Método de detección de presencia de objetos móviles.
Sector de la técnica
La presente invención concierne en general a un método de detección de presencia de objetos móviles que comprende la utilización de un sistema de detección con una unidad transmisora y una unidad receptora de radiación electromagnética, cada una de las cuales dispuesta a lado y lado de una vía, y en particular a un método de detección que comprende generar una señal de detección de presencia de un objeto móvil en función de que el número de dispositivos receptores que detecten el corte de unos haces de dicha radiación electromagnética sea superior a un número predeterminado.
Estado de la técnica anterior
Son conocidos los sistemas de detección de de presencia de objetos móviles que, mediante la utilización de una unidad transmisora y una unidad receptora de radiación electromagnética, en general infrarroja, crean una barrera o cortina de haces que al ser atravesados por un objeto, provocan que la unidad receptora detecte tal interferencia y actúe en consecuencia, ya sea para contar el número de objetos detectados, determinar el tipo de objetos detectados o para generar una correspondiente alarma.
Uno de dichos sistemas aparece descrito en la patente ES-A-2144958, de dominio público, en la cual los haces de radiación electromagnética emitidos recorren un plano, que se solapan por lo menos parcialmente, y son emitidos sucesivamente en forma de impulsos, los cuales inciden sobre el dispositivo receptor que envía la información sobre las señales recibidas en un instante dado a una unidad de control, que compara dicha información sobre las señales recibidas en un instante dado con la información sobre las señales recibidas en ausencia de objetos que interfieran con dichos haces de ondas electromagnéticas y analiza dicha comparación para determinar si hay presencia o no de un objeto en dicho plano de detección. En dicha patente se propone incluso determinar el sentido de la marcha de los objetos detectados, en general vehículos que transitan una vía, mediante la colocación de un segundo conjunto de elementos emisores y de elementos receptores en un plano paralelo al citado plano de detección, separado una cierta distancia y conectado a la misma unidad de control, la cual determina con la información adicional que recibe de dicho segundo conjunto de elementos emisores y receptores, el mencionado sentido de marcha de los objetos detectados.
Otra de tales propuestas se encuentra en la solicitud de patente EP-A-0563516, la cual concierne a una barrera óptica para detectar objetos móviles que comprende una unidad transmisora dispuesta a un lado de una vía y con una serie de diodos emisores de infrarrojos multiplexados y modulados a una frecuencia predeterminada, una unidad receptora dispuesta al otro lado de la vía con una serie de fotorreceptores de infrarrojos, y equipamiento electrónico que compara las señales eléctricas generadas por cada uno de los fotorreceptores con una respectiva señal de referencia con el fin de determinar, en función del resultado de dicha comparación, si un objeto ha invadido la zona de detección de la barrera óptica.
En general los sistemas de detección mencionados y descritos en ambos documentos citados, están aplicados a la detección del paso de vehículos que transitan por una vía, y no tienen en cuenta que algunos de los haces de radiación electromagnética pueden ser cortados por otra clase de objetos indeseados que no son dichos vehículos (tales como pájaros, hojas, salpicaduras, etc.) provocando así falsas detecciones.
Por otra parte la detección del sentido de la marcha de los vehículos que transitan una vía llevada cabo en la patente ES-A-2144958 mediante la utilización de sendos conjunto de elementos emisores y de elementos receptores en unos respectivos planos paralelos adolece de algunos inconvenientes además de la posibilidad de falsas detecciones comentadas arriba.
Estos inconvenientes son debidos a que también es posible obtener falsas detecciones al detectar no solamente la presencia sino también el sentido de la marcha de algunos de los objetos indeseados citados arriba, así como al detectar elementos de los propios vehículos que se desplazan en un sentido contrario al del vehículo, tal como los faldones que portan algunos camiones, y confundir erróneamente las detecciones de dichos elementos y sus sentidos de desplazamiento con supuestas detecciones de vehículos que circulan hacia atrás, cuando en realidad tales vehículos están circulando hacia delante.
Explicación de la invención
Aparece necesario ofrecer una alternativa al estado de la técnica que supere los inconvenientes citados en el apartado anterior, evitando falsas detecciones tanto de presencia como de sentidos de circulación de los objetos móviles detectados.
Para ello la presente invención concierne a un método de detección de presencia de objetos móviles, que comprende la utilización de un sistema de detección con una unidad transmisora y una unidad receptora de radiación electromagnética, en general rayos infrarrojos, cada una de las cuales dispuesta a lado y lado de una vía. El método comprende:
- emitir una serie de haces de radiación electromagnética mediante una serie de dispositivos emisores de dicha unidad transmisora alineados formando como mínimo una primera columna emisora,
- recibir dichos haces de radiación electromagnética por parte de una serie de dispositivos receptores de dicha unidad receptora alineados formando como mínimo una primera columna receptora, enfrentada a dicha primera columna emisora,
- utilizar un primer sistema electrónico en conexión con dichos dispositivos receptores para detectar la intercepción de uno o más de dichos haces mediante la detección de la ausencia de recepción por parte de al menos uno de dichos dispositivos receptores, y para generar una correspondiente señal de detección de presencia de un objeto móvil en función de al menos dicha detección de ausencia de recepción por parte de al menos dicho dispositivo receptor.
A diferencia de las propuestas conocidas el método propuesto por la presente invención comprende generar dicha señal de detección de presencia de un objeto móvil no directamente al producirse una detección en uno de los dispositivos receptores, sino en función de que se cumplan una o más condiciones, siendo la condición principal que el número de dispositivos receptores que detecten una ausencia de recepción de radiación electromagnética sea superior a un número predeterminado mayor que dos.
Se evitan así las falsas detecciones que los objetos indeseados mencionados anteriormente provocan en los sistemas de detección que utilizan métodos de detección convencionales, teniendo en cuenta solamente así aquellos objetos de cierta magnitud, cuyo paso por el área cubierta por el sistema de detección active al menos dos dispositivos receptores.
Para un ejemplo de realización el método comprende generar dicha señal de detección de presencia de un objeto móvil también en función de la ubicación de los dispositivos receptores que detecten una ausencia de recepción de radiación electromagnética, ponderando a los dispositivos receptores en función de su ubicación, dándoles menor peso a los dispositivos receptores donde se considere que es más fácil que los comentados objetos indeseados puedan interferir.
Si bien el método propuesto es aplicable para sistemas de detección con una unidad transmisora y una unidad receptora con solamente unas respectivas columnas emisora y receptora, en general el método propuesto también comprende:
- emitir una serie de haces de radiación electromagnética mediante una serie de dispositivos emisores de dicha unidad transmisora alineados formando una segunda columna emisora,
- recibir dichos haces de radiación electromagnética emitidos por los dispositivos emisores de la segunda columna emisora y/o los emitidos por los dispositivos emisores de la primera columna emisora, por parte de una serie de dispositivos receptores de dicha unidad receptora alineados formando una segunda columna receptora, enfrentada a dicha segunda columna emisora,
- utilizar dicho primer sistema electrónico para detectar la intercepción de uno o más de dichos haces mediante la detección también de la ausencia de recepción por parte de al menos uno de los dispositivos receptores de la segunda columna receptora, y para generar:
Reivindicaciones:
1. Método de detección de presencia de objetos móviles, del tipo que comprende la utilización de un sistema de detección con al menos una unidad transmisora (1) y una unidad receptora (2) de radiación electromagnética, cada una de las cuales dispuesta a lado y lado de una vía, siendo dicho método del tipo que comprende:
- emitir una serie de haces de radiación electromagnética mediante una serie de dispositivos emisores (De) de dicha unidad transmisora (1) alineados formando al menos una primera columna emisora (E1),
- recibir dichos haces de radiación electromagnética por parte de una serie de dispositivos receptores (Dr) de dicha unidad receptora (2) alineados formando al menos una primera columna receptora (R1), enfrentada a dicha primera columna emisora (E1),
- utilizar un primer sistema electrónico en conexión con dichos dispositivos receptores (Dr) para detectar la intercepción de al menos uno de dichos haces mediante la detección de la ausencia de recepción por parte de al menos uno de dichos dispositivos receptores (Dr), y para generar una correspondiente señal de detección de presencia de un objeto móvil en función de al menos dicha detección de ausencia de recepción por parte de al menos dicho dispositivo receptor (Dr), caracterizado porque, para evitar las falsas detecciones que provocan los objetos indeseados de menor magnitud a dicho objeto móvil a detectar, el método comprende generar dicha señal de detección de presencia de un objeto móvil al menos en función:
- de que el número de dispositivos receptores (Dr) de dicha primera columna receptora (R1) que detecten una ausencia de recepción de radiación electromagnética sea superior a un número predeterminado mayor que dos; y
- de la ubicación de los dispositivos receptores (Dr) que detecten una ausencia de recepción de radiación electromagnética, ponderando a los dispositivos receptores (Dr) en función de su ubicación.
2. Método según la reivindicación 1, caracterizado porque comprende:
- emitir una serie de haces de radiación electromagnética mediante una serie de dispositivos emisores (De) de dicha unidad transmisora (1) alineados formando una segunda columna emisora (E2),
- recibir dichos haces de radiación electromagnética emitidos por los dispositivos emisores (De) de la segunda columna emisora (E2) y/o los emitidos por los dispositivos emisores (De) de la primera columna emisora (E1), por parte de una serie de dispositivos receptores (Dr) de dicha unidad receptora (2) alineados formando una segunda columna receptora (R2), enfrentada a dicha segunda columna emisora (E2),
- utilizar dicho primer sistema electrónico para detectar la intercepción de al menos uno de dichos haces mediante la detección también de la ausencia de recepción por parte de al menos uno de los dispositivos receptores (Dr) de la segunda columna receptora (R2), y para generar:
3. Método según la reivindicación 2, caracterizado porque dicha ponderación comprende asignar un peso mayor a los dispositivos receptores (Dr) situados a una menor altura dentro de su respectiva columna receptora (R1, R2) y asignar un peso menor a los dispositivos receptores (Dr) situados en una de dichas columnas receptoras (R1, R2) respecto al peso asignado a los de la otra columna receptora (R2, R1).
4. Método según la reivindicación 3, caracterizado porque con el fin de generar dicha señal de detección de sentido de circulación de dicho objeto móvil, el método comprende utilizar al menos parte de los dispositivos emisores (De) de las primera (E1) y segunda columnas de emisión (E2) y al menos parte de los dispositivo receptores (Dr) de las primera (R1) y segunda columnas de recepción (R2), formando unos respectivos sub-grupos (E1s, E2s, E1i, E2i, R1s, R2s, R1i, R2i), estando dos de dichos sub-grupos (E1s, E2s) de dispositivos emisores (De) situados a una altura determinada encarados hacia dos correspondientes sub-grupos (R1s, R2s) de dispositivos receptores (Dr), y otros dos de dichos sub-grupos (E1i, E2i) de dispositivos emisores (De) encontrándose situados a una altura inferior a dicha altura determinada encarados hacia otros dos correspondientes sub-grupos (R1i, R2i) de dispositivos receptores (Dr).
5. Método según cualquiera de las reivindicaciones anteriores, caracterizado porque comprende emitir al menos un haz de radiación electromagnética mediante un dispositivo emisor (De) situado a una altura determinada en dirección hacia al menos un dispositivo receptor (Dr) situado a una altura diferente a dicha altura determinada, y utilizar el primer sistema electrónico para detectar una posible intercepción de al menos dicho haz inclinado verticalmente.
6. Método según una cualquiera de las reivindicaciones 2 a 5, caracterizado porque comprende emitir al menos un haz de radiación electromagnética mediante un dispositivo emisor (De) de una (E1) de dichas columnas emisoras (E1, E2) en dirección hacia al menos un dispositivo receptor (Dr) de la columna receptora (R2) que no está enfrentada a la columna emisora (E1) desde la que se ha emitido dicho haz, y utilizar el primer sistema electrónico para detectar una posible intercepción de al menos dicho haz inclinado horizontalmente.
7. Método según la reivindicación 2 ó 4, caracterizado porque dicha señal de detección de sentido de circulación del objeto móvil generada es una señal representativa de:
- al menos el sentido de circulación de entrada del objeto móvil en la zona cubierta por el sistema de detección, en cuyo caso dichas detecciones consecutivas, que son al menos dos, por parte de al menos un dispositivo receptor (Dr) de la primera columna de recepción (R1) y uno de la segunda columna de recepción (R2) son detecciones de ausencia de recepción de haces,
y/o
- al menos el sentido de circulación de salida del objeto móvil de la zona cubierta por el sistema de detección, en cuyo caso dichas detecciones consecutivas, que son al menos dos, por parte de al menos un dispositivo receptor (Dr) de la primera columna de recepción (R1) y uno de la segunda columna de recepción (R2) son detecciones de nuevas presencias de recepción de haces tras unas correspondientes ausencias.
8. Método según la reivindicación 7, caracterizado porque comprende establecer para cada dos dispositivos receptores (Dr), uno de la primera columna (R1) y el otro de la segunda (R2):
- un sentido de entrada positivo cuando las correspondientes detecciones consecutivas de ausencia de recepción de haces se producen empezando por el dispositivo receptor (Dr) de la primera columna (R1) y siguiendo por el de la segunda columna (R2);
- un sentido de entrada negativo cuando las correspondientes detecciones consecutivas de ausencia de recepción de haces se producen empezando por el dispositivo receptor (Dr) de la segunda columna (R2) y siguiendo por el de la primera columna (R1);
- un sentido de salida positivo cuando las correspondientes detecciones consecutivas de presencia de nueva recepción de haces se producen empezando por el dispositivo receptor (Dr) de la primera columna (R1) y siguiendo por el de la segunda columna (R2), y
- un sentido de salida negativo cuando las correspondientes detecciones consecutivas de presencia de nueva recepción de haces se producen empezando por el dispositivo receptor (Dr) de la segunda columna (R2) y siguiendo por el de la primera columna (R1).
9. Método según la reivindicación 8, caracterizado porque comprende establecer que el objeto móvil:
- ha entrado en la zona cubierta por el sistema de detección con un sentido de circulación hacia delante cuando al menos parte de dichas detecciones consecutivas de ausencia de recepción de haces de sentido de entrada positivo se producen en un tiempo inferior a un valor predeterminado, y que
- ha salido de la zona cubierta por el sistema de detección con un sentido de circulación hacia delante cuando al menos parte de dichas detecciones consecutivas de presencia de nueva recepción de haces de sentido de salida positivo se producen en un tiempo inferior a un valor predeterminado.
10. Método según la reivindicación 8, caracterizado porque comprende establecer que el objeto móvil ha entrado en la zona cubierta por el sistema de detección con un sentido de circulación hacia delante o hacia atrás, cuando todas las detecciones consecutivas de ausencia de recepción de haces de todos los dispositivos receptores (Dr) de al menos dos de los sub-grupos de recepción (R1s-R2s ó R1i-R2i), uno de cada una de las dos columnas de recepción (R1, R2), establecen, respectivamente, un sentido de entrada positivo o negativo.
11. Método según la reivindicación 10, caracterizado porque cuando no existe unanimidad en cuanto al sentido de entrada establecido para todas las detecciones consecutivas de ausencia de recepción de haces de todos los dispositivos receptores (Dr) de al menos dos de los sub-grupos de recepción (R1s, R2s ó R1i, R2i), uno de cada una de las dos columnas de recepción (R1, R2), el método comprende:
- establecer que el objeto móvil ha entrado en la zona cubierta por el sistema de detección con un sentido de circulación hacia delante si la mayoría de sentidos de entrada establecidos son positivos, y establecer un sentido de circulación hacia atrás si la mayoría de sentidos de entrada establecidos son negativos; y
- si existen, para todos los subgrupos de recepción (R1s, R2s, R1i y R2i), el mismo número de sentidos de entrada positivos que sentidos de entrada negativos establecidos, el método comprende establecer que el objeto móvil ha entrado en la zona cubierta por el sistema de detección con un sentido de circulación hacia delante si el sentido de entrada establecido por las primeras detecciones consecutivas ha sido positivo, y hacia atrás si ha sido negativo.
12. Método según la reivindicación 11, caracterizado porque en dicho caso en que no existe unanimidad en cuanto al sentido de entrada establecido para todas las detecciones consecutivas de ausencia de recepción de haces de todos los dispositivos receptores (Dr) de al menos dos de los sub-grupos de recepción (R1s, R2s ó R1i, R2i), uno de cada una de las dos columnas de recepción (R1, R2), y existen un mismo número de sentidos de entrada positivos que sentidos de entrada negativos establecidos para todos los subgrupos de recepción (R1s, R2s, R1i y R2i), si las primeras detecciones consecutivas no han permitido establecer un sentido determinado, el método comprende establecer que el objeto móvil ha entrado en la zona cubierta por el sistema de detección con un sentido de circulación hacia delante si el sentido de entrada establecido por las detecciones consecutivas de los dispositivos receptores (Dr) ubicados en las posiciones más bajas de las columnas receptoras (R1, R2) que han permitido establecer el sentido, ha sido positivo, y hacia atrás si ha sido negativo.
13. Método según la reivindicación 8, caracterizado porque comprende establecer que el objeto móvil ha salido de la zona cubierta por el sistema de detección con un sentido de circulación hacia delante o hacia atrás, mediante el análisis de los sentidos de salida establecidos por las detecciones consecutivas de presencia de nueva recepción de haces de los dispositivos receptores (Dr) de todos los sub-grupos de recepción (R1s, R2s, R1i, R2i), siendo dicho análisis llevado a cabo mediante el estudio de dos variables que suman unos resultados de la aplicación de unos criterios sobre al menos los sentidos de salida establecidos, sumando una primera de dichas variables dichos resultados cuando expresan un sentido de salida positivo, y sumando una segunda de dichas variables dichos resultados cuando expresan un sentido de salida negativo.
14. Método según la reivindicación 13, caracterizado porque dichos criterios son al menos uno del grupo que incluye los siguientes criterios, o una combinación de los mismos:
- mayoría de sentidos de salida iguales establecidos por las detecciones consecutivas de presencia de nueva recepción de haces de los dispositivos receptores (Dr) de los sub-grupos superiores en altura (R2s, R1s),
- mayoría de sentidos de salida iguales establecidos por las detecciones consecutivas de presencia de nueva recepción de haces de los dispositivos receptores (Dr) de los sub-grupos inferiores en altura (R2i, R1i),
- última detección consecutiva de presencia de nueva recepción de haces de los dispositivos receptores (Dr) de los sub-grupos superiores (R2s, R1s),
- última detección consecutiva de presencia de nueva recepción de haces de los dispositivos receptores (Dr) de los sub-grupos inferiores (R2i, R1i), y
- sentido de salida establecido por las detecciones consecutivas de presencia de nueva recepción de haces de los dispositivos receptores (Dr) ubicados en las posiciones más bajas de las columnas receptoras (R1, R2).
15. Método según la reivindicación 13 ó 14, caracterizado porque comprende establecer que el objeto móvil ha salido de la zona cubierta por el sistema de detección:
- con un sentido de circulación hacia delante, si dicha primera variable tiene un valor mayor que dicha segunda variable;
- con un sentido de circulación hacia atrás, si es la segunda variable la que tiene un valor mayor que la primera variable; o
- con el mismo sentido de circulación que se ha establecido para la entrada del objeto móvil en la zona cubierta por el sistema de detección, si el valor de dichas variables es el mismo.
Patentes similares o relacionadas:
Procedimiento para generar un registro digital y una unidad de carretera de un sistema de peaje de carreteras que implemente el procedimiento, del 5 de Febrero de 2020, de KAPSCH TRAFFICCOM AG: Un procedimiento para generar un registro digital (E) de un vehículo en un sistema de peaje de carreteras , que comprende, en una unidad de carretera del sistema […]
DISTANCIÓMETRO VIAL, del 7 de Agosto de 2019, de ZAPATERO GARCIA, Julio: 1. Dispositivo de tráfico que se caracteriza por ir instalado en un vehículo informando sobre la distancia de seguridad que se lleva en cada momento con respecto […]
Sistema y método para medir el flujo del tráfico de un área, del 26 de Abril de 2019, de CUENDE INFOMETRICS, S.A.: Un sistema para estimar el flujo del tráfico real de un área, comprendiendo el sistema : • imágenes aéreas de un área tomadas a intervalos […]
Dispositivo de peaje o sistemas telemáticos, del 3 de Abril de 2019, de KAPSCH TRAFFICCOM AB: Método para controlar un sistema de peaje que comprende una pluralidad de sensores de imagen, que pueden combinar la información entre sí para estimar una altura, una […]
Procedimiento de control de un sistema de vigilancia de tráfico, del 18 de Marzo de 2019, de KAPSCH TRAFFICCOM AB: Procedimiento para controlar un sistema de vigilancia de tráfico, en el que el sistema tiene una pluralidad de sensores (100a-100d) estereoscópicos […]
Sistema y métodos para el soporte de vehículos autónomos por medio de la percepción ambiental y calibración y verificación de sensores, del 6 de Marzo de 2019, de Signify Holding B.V: Un sistema de soporte para vehículo autónomo caracterizado por que comprende: una red de iluminación que tiene: una pluralidad de unidades […]
Sistema de vigilancia del comportamiento del tráfico, del 8 de Noviembre de 2018, de KAPSCH TRAFFICCOM AB: Un método para supervisar el comportamiento del tráfico entre una pluralidad de vehículos por medio de un dispositivo de cámara estereoscópica conectado […]
Sensor mejorado de telémetro de láser, del 8 de Noviembre de 2017, de OSI Optoelectronics: Un sistema para determinar la forma tridimensional de un vehículo , comprendiendo el sistema: un sensor de distancia que comprende un transmisor de […]