PROCEDIMIENTO Y DISPOSITIVO PARA LA DETERMINACION PASIVA DE DATOS DE UN OBJETIVO.
Procedimiento para la determinación pasiva de datos (Rest, vest,
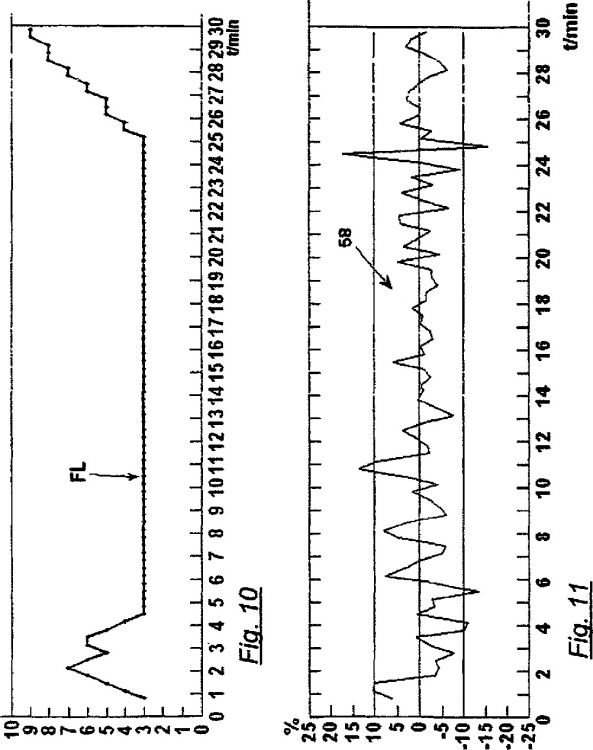
?est) de un objetivo mediante recepción selectiva en dirección de ondas- sonoras, que son emitidas o enviadas por un objetivo (Z), con una disposición de receptores de ondas sonoras en el agua (11; 13) de una instalación de recepción de sonar, en particular sobre un vehículo portador (10), a partir de ángulos de marcación medidos (fca, ffa) hacia uno o varios objetivos (Z), en que en ciclos de tratamiento sucesivos es estimado por cada ciclo de tratamiento al menos un dato de objetivo (Rest; vest; ?est) a partir de ángulos de marcación medidos (fca, ffa), en que en la estimación de cada dato de objetivo entran ángulos de marcación medidos (fca, ffa) procedentes de un número de ciclos de tratamiento precedentes que reciben la denominación de longitud de filtro (FLn), caracterizado porque la longitud de filtro (FLn) es determinada individualmente para cada objetivo (Z) de forma automática y dinámica en función de una distancia estimada al objetivo (Z) y es reducida para un objetivo (Z) que se acerca o respectivamente es aumentada para un objetivo (Z) que se aleja y es ajustada correspondientemente a la longitud de filtro (FLn) así determinada
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E08011111.
Solicitante: ATLAS ELEKTRONIK GMBH.
Nacionalidad solicitante: Alemania.
Dirección: SEBALDSBRUCKER HEERSTRASSE 235,28309 BREMEN.
Inventor/es: STEIMEL, ULRICH.
Fecha de Publicación: .
Fecha Solicitud PCT: 19 de Junio de 2008.
Fecha Concesión Europea: 31 de Marzo de 2010.
Clasificación Internacional de Patentes:
- G01S11/14 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 11/00 Sistemas para determinar la distancia o la velocidad que no utilizan la reflexión o la rerradiación (establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia G01S 5/00). › que utilizan ondas ultrasonoras, sonoras, o infrasonoras.
- G01S3/14 G01S […] › G01S 3/00 Localizadores de dirección para la determinación de la dirección desde la que se reciben ondas infrasonoras, sonoras, ultrasonoras o electromagnéticas o emisiones de partículas, que no tienen contenido direccional significativo (establecimiento de la posición mediante la coordinación de una pluralidad de determinaciones de dirección o de líneas de posición G01S 5/00). › Sistemas para determinar la dirección o la desviación respecto a una dirección predeterminada.
Clasificación PCT:
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
Procedimiento y dispositivo para la determinación pasiva de datos de un objetivo.
La invención se refiere a un procedimiento para la determinación pasiva de datos de un objetivo mediante recepción selectiva en dirección de ondas sonoras del tipo citado en el preámbulo de la reivindicación 1 así como a un dispositivo correspondiente del tipo citado en el preámbulo de la reivindicación 15.
Para poder determinar como datos de un objetivo, sin que se autodelate un vehículo portador tal como por ejemplo una embarcación de superficie o un submarino, datos de objetivo tales como posición, velocidad y rumbo de un objetivo, por ejemplo de una embarcación de superficie, un submarino u otro objetivo que en particular se desplaza rápidamente, habitualmente se reciben con una instalación de recepción de sonar ondas sonoras de un ruido de objetivo emitido por este objetivo y se miden ángulos de marcación hacia el objetivo. A partir de estos ángulos de marcación, junto con la posición propia del vehículo portador, se estima una posición del objetivo y se mide un ángulo de marcación estimado correspondiente. De forma iterativa se reduce la diferencia entre el ángulo de marcación medido y el estimado hasta que quede por debajo de un límite de error. La posición estimada subyacente se reconoce como posición del objetivo.
Partiendo de la posición inicial del objetivo, que es escogida por ejemplo arbitrariamente como posición inicial sobre una primera línea de marcación o es conocida por otros sensores que se encuentran a bordo, se calculan posiciones a partir de componentes X-Y estimadas para el objetivo y se determinan ángulos de marcación estimados a partir de ellas. El vehículo portador navega para las medidas de ángulos de marcación con rumbo constante y velocidad constante y recorre un camino que se denomina etapa propia. Para una primera determinación de los datos del objetivo es necesario que el vehículo portador realice una maniobra y varíe su rumbo o su velocidad, abriendo así una nueva etapa propia. Las siguientes medidas de ángulos de marcación hacen posible entonces una primera determinación de datos del objetivo.
Además es conocido a partir del documento EP 1 410 060 B1, que constituye el preámbulo de las reivindicaciones independientes, determinar datos del objetivo sin maniobra del vehículo portador, mediante el recurso de que las señales recibidas, agrupadas de forma selectiva en dirección formando señales en grupo, de una disposición de transducción electroacústica son sometidas a una transformada de Fourier y son determinadas las frecuencias de líneas espectrales en el espectro de frecuencias de las señales en grupo. La frecuencia de una o varias líneas espectrales agrupadas, en calidad de frecuencia recibida, se usa junto al ángulo de marcación medido como base para la estimación de los datos del objetivo. Se estiman posiciones del objetivo y se hallan ángulos de marcación estimados para ellas. Entre el ángulo de marcación medido y el estimado se determina una diferencia de ángulo de marcación. Además de ello, a partir de las mismas posiciones estimadas del objetivo y de sus variaciones temporales se estima un desplazamiento Doppler y una frecuencia emitida o enviada hacia el objetivo. La frecuencia emitida estimada es desplazada en frecuencia correspondientemente al desplazamiento Doppler estimado y forma la frecuencia Doppler estimada de la que se resta la frecuencia recibida. La diferencia entre la frecuencia recibida y la frecuencia Doppler estimada se emplea como diferencia de frecuencia junto con la diferencia de ángulo de marcación para la determinación de los datos del objetivo según el denominado algoritmo de mínimos cuadrados.
Otros procedimientos para la determinación de datos de un objetivo son conocidos a partir del documento DE 34 46 658 C2 y DE 103 52 738 A1.
El documento DE 34 46 658 C2 muestra un filtro para la determinación de datos de un objetivo, en el que a partir de ángulos de marcación medidos se hallan coeficientes de filtro óptimos en un tratamiento iterativo de señales. Con estos coeficientes de filtro y los ángulos de marcación medidos se activa un circuito de acumulación, que determina los valores de corrección para una estimación inicial de los datos del objetivo. El filtro tiene circuitos multiplicadores para la determinación de los coeficientes para datos dinámicos del objetivo. Este filtro se emplea para la determinación pasiva de datos de posición y movimiento de vehículos objetivo.
El documento DE 103 52 73 8 A1 describe cómo a partir de ángulos de marcación estimados, que se determinan a partir de posiciones estimadas de un objetivo, y de ángulos de marcación medidos se minimizan iterativamente diferencias de ángulo de marcación entre ángulos de marcación medidos y estimados. Para el acortamiento del tiempo de iteración se prefijan valores límite para la distancia, el rumbo y/o la velocidad del objetivo y se determinan sobre una línea de marcación, bajo un ángulo de marcación medido, a partir de estos valores límite condiciones de contorno para componentes de posición y componentes de velocidad para la estimación de la posición del objetivo, que se emplean para la minimización de la diferencia de ángulo de marcación.
En los procedimientos citados para la determinación de datos de un objetivo se recurre respectivamente a valores de medida (ángulos de marcación o respectivamente frecuencias) procedentes de un periodo temporal pasado, de una duración predeterminada, para una estimación actual de datos del objetivo. Es decir, se considera la evolución del objetivo sobre un periodo de tiempo largo predefinido, por ejemplo una hora, y se emplea esta evolución para las estimaciones actuales de datos del objetivo. Para la determinación de un nuevo conjunto de datos del objetivo se recurre por ello a los valores de medida de este periodo de tiempo pasado, que son sometidos a un filtrado. El filtro correspondiente tiene por ello una longitud de filtro fija, que corresponde a este periodo de tiempo predefinido. La estimación de datos del objetivo es por ello bastante lenta y tras variaciones de rumbo y/o velocidad del objetivo ofrece resultados precisos eventualmente sólo tras un tiempo que corresponde a la longitud del filtro. Es decir, la maniobra del objetivo debe quedar tan alejada en el tiempo que ya no caiga dentro del periodo de tiempo considerado en la longitud del filtro. La estimación de datos del objetivo ofrece de forma fiable buenos datos del objetivo cuando un objetivo se mueve uniformemente con relación al vehículo portador. Sin embargo, tan pronto como un objetivo varía su rumbo o su velocidad, y en particular realiza maniobras en el entorno cercano del vehículo portador, empeoran significativamente los datos estimados del objetivo y sólo convergen otra vez cuando el objetivo sigue navegando sin aceleración con rumbo constante durante un tiempo largo.
La invención tiene por ello como base el problema de hallar datos rápidamente convergentes de objetivos sin que sean necesarias maniobras propias, incluso cuando estos objetivos realizan maniobras de objetivo y/o son objetivos que se acercan o se alejan rápidamente.
La invención resuelve este problema con un procedimiento según la reivindicación 1 así como con un dispositivo según la reivindicación 15.
Los ángulos de marcación medidos hacia un objetivo mediante una disposición de receptores de ondas sonoras en el agua, tales como transductores electroacústicos u optoacústicos de una instalación de recepción de sonar, son tratados en ciclos de tratamiento sucesivos obteniéndose datos del objetivo. Aquí, por cada ciclo de tratamiento se estima al menos un dato del objetivo, en particular sin embargo un conjunto de datos del objetivo. En esta estimación sin embargo no se incluyen sólo los ángulos de marcación y/o los datos del objetivo obtenidos durante un ciclo de tratamiento, sino que en la estimación se incluyen más bien los ángulos de marcación y/o los datos del objetivo medidos procedentes de un grupo de ciclos de tratamiento sucesivos, a saber procedentes de un número de ciclos de tratamiento precedentes designados como longitud de filtro.
La invención ha reconocido que esta longitud de filtro puede ser escogida en muchos casos ventajosamente de forma particularmente corta, para poder seguir, con una buena calidad de los datos estimados del objetivo, objetivos que se acercan rápidamente, que realizan preferentemente además maniobras de objetivo. Los resultados de estimación convergen para objetivos a una distancia corta y con una longitud de filtro corta, incluso cuando...
Reivindicaciones:
1. Procedimiento para la determinación pasiva de datos (Rest, vest, ?est) de un objetivo mediante recepción selectiva en dirección de ondas- sonoras, que son emitidas o enviadas por un objetivo (Z), con una disposición de receptores de ondas sonoras en el agua (11; 13) de una instalación de recepción de sonar, en particular sobre un vehículo portador (10), a partir de ángulos de marcación medidos (
2. Procedimiento según la reivindicación 1, caracterizado porque unos ángulos de marcación (
3. Procedimiento según la reivindicación 2, caracterizado porque con respecto a los ángulos de marcación medidos (
4. Procedimiento según la reivindicación 3, caracterizado porque para hallar un valor de dispersión (s1, s2) actual se recurre a un número de ángulos de marcación medidos (
5. Procedimiento según una de las reivindicaciones 2 hasta 4, caracterizado porque un valor de paralaje (Pn) actual es calculado a partir de una formación de valor medio de un número de valores de paralaje (Pn-1, Pn-2, Pn-3, ...) determinados precedentemente y dado el caso a partir de un valor de paralaje medido actualmente.
6. Procedimiento según la reivindicación 5, caracterizado porque los valores de paralaje (Pn-1, Pn-2, Pn-3, ...) precedentes son determinados respectivamente mediante formación de diferencias de ángulos de marcación medidos (
7. Procedimiento según una de las reivindicaciones precedentes, caracterizado porque la longitud de filtro (FLn) para un ciclo de tratamiento (n) actual es escogida igual a una longitud de filtro (FL0) nuevamente calculada, en caso de que esta nueva longitud de filtro (FL0) no sea mayor que la longitud de filtro (FLn-1) determinada en el ciclo de tratamiento precedente.
8. Procedimiento según la reivindicación 7 con referencia a una de las reivindicaciones 2 hasta 6, caracterizado porque una longitud de filtro (FL0) nueva es calculada como número entero a partir del valor de paralaje (Pn) actual así como a partir de los valores de dispersión (s1, s2) hallados.
9. Procedimiento según una de las reivindicaciones precedentes, caracterizado porque la longitud de filtro (FLn) para un ciclo de tratamiento (n) actual es escogida con un valor mayor en como máximo 1 que la longitud de filtro (FLn-1) determinada en el ciclo de tratamiento (n-1) precedente, en caso de que una longitud de filtro (FL0) calculada nuevamente sea mayor que la longitud de filtro (FLn-1) determinada en el ciclo de tratamiento (n-1) precedente.
10. Procedimiento según la reivindicación 9, caracterizado porque la longitud de filtro (FLn) para el ciclo de tratamiento (n) actual es escogida igual a la longitud de filtro (FLn-1) del ciclo de tratamiento (n-1) precedente, en caso de que el valor de paralaje estimado más grande (Pmax), presente en los ciclos de tratamiento (n-1) previos presentes dentro de esta longitud de filtro (FLn-1), sea mayor que un valor de paralaje (Pb) necesario para la longitud de filtro (FLn-1) escogida en el ciclo de tratamiento (n-1) precedente.
11. Procedimiento según la reivindicación 10, caracterizado porque el valor de paralaje (Pb) necesario es determinado a partir de los valores de dispersión hallados y a partir de la longitud de filtro (FLn-1) del ciclo de tratamiento (n-1) precedente.
12. Procedimiento según una de las reivindicaciones precedentes, caracterizado porque con la longitud de filtro (FLn) determinada dinámicamente es estimada la distancia (Rest) al objetivo (Z) y porque al menos otra longitud de filtro es hallada para la estimación de rumbo (?est) y/o velocidad (vest) de este objetivo (Z) y esta otra longitud de filtro es escogida al menos tan grande como la longitud de filtro (FLn) para la estimación de distancia.
13. Procedimiento según una de las reivindicaciones precedentes, caracterizado porque la longitud de filtro no es variada para una variación del valor de paralaje debida a una maniobra propia del vehículo portador (10).
14. Procedimiento según una de las reivindicaciones precedentes, caracterizado porque una distancia estimada (Rest) del objetivo es comparada con una distancia mínima (Rmin) prefijable y en caso de que quede por debajo de la distancia mínima (Rmin) es mostrado un aviso por riesgo para la seguridad del vehículo portador.
15. Dispositivo para la determinación pasiva de datos (Rest, vest, ?est) de un objetivo mediante recepción selectiva en dirección de ondas sonoras, emitidas o enviadas por un objetivo (Z), mediante una disposición de receptores de ondas sonoras en el agua (11; 13) de una instalación de recepción de sonar, en particular sobre un vehículo portador (10), en que en un filtro de estimación (15) puede ser estimado en ciclos de tratamiento sucesivos por cada ciclo de tratamiento al menos un dato de objetivo (Rest; vest; ?est) a partir de ángulos de marcación medidos (
Patentes similares o relacionadas:
Medición de distancia acústica para una red de arrastre, del 15 de Abril de 2020, de Scantrawl a.s: Un método para determinar la distancia entre una embarcación y al menos un módulo de sensor dispuesto en el equipo de pesca que es remolcado por la embarcación, […]
Dron Perfilador de corrientes fluviales, del 24 de Junio de 2019, de UNIVERSIDAD DE VALLADOLID: Dron perfilador de corrientes fluviales. Consiste en el desarrollo de una herramienta capaz de situar diferentes sensores en zonas de difícil acceso […]
Sistema y método de posicionamiento acústico subacuático, del 29 de Noviembre de 2017, de TrackServer, Inc: Un método para determinar la posición de un dispositivo subacuático, que comprende: proporcionar una pluralidad de dispositivos de estación […]
Procedimiento, sistema y programa informático para determinar distancias y posiciones, del 30 de Agosto de 2017, de Van Taunay, Gerald Jules Rudolf: Un procedimiento para determinar una distancia entre al menos un primer dispositivo (10, 10a, 10b, 10-1 a 10-8) de posicionamiento, FPD, y un segundo dispositivo (20, 20a, 20b, […]
 Método para la determinación de la distancia entre dispositivos acústicos bajo el agua, del 29 de Marzo de 2017, de Scantrawl a.s: Un método para la determinación de la distancia desde un punto de referencia al menos a dos módulos de sensor cuando estos están colocados aproximadamente […]
Método para la determinación de la distancia entre dispositivos acústicos bajo el agua, del 29 de Marzo de 2017, de Scantrawl a.s: Un método para la determinación de la distancia desde un punto de referencia al menos a dos módulos de sensor cuando estos están colocados aproximadamente […]
Procedimiento para determinar una diferencia de distancia, del 8 de Marzo de 2017, de SKJOLD-LARSEN, HENNING: Un procedimiento para determinar la diferencia de distancia desde un punto de referencia a al menos dos módulos de sensor , todos ellos situados bajo el agua, […]
 Procedimiento y dispositivo para estimar la distancia más probable entre objetos, del 19 de Agosto de 2015, de FRAUNHOFER-GESELLSCHAFT ZUR FORDERUNG DER ANGEWANDTEN FORSCHUNG E.V.: Procedimiento para la estimación de la distancia más probable de por lo menos un objeto móvil a por lo menos otro objeto móvil , […]
Procedimiento y dispositivo para estimar la distancia más probable entre objetos, del 19 de Agosto de 2015, de FRAUNHOFER-GESELLSCHAFT ZUR FORDERUNG DER ANGEWANDTEN FORSCHUNG E.V.: Procedimiento para la estimación de la distancia más probable de por lo menos un objeto móvil a por lo menos otro objeto móvil , […]
Dispositivo para determinar una longitud de extensión de una pieza de máquina extensible, del 15 de Octubre de 2014, de MOBA - MOBILE AUTOMATION AG: Dispositivo para determinar una longitud de extensión de una pieza de máquina extensible con un primer sensor ultrasónico que comprende un primer […]