APARATO Y METODO PARA DETERMINAR UNA ELEVACION DE HERRAMIENTAS DE TRABAJO.
Aparato para determinar una elevación de una herramienta de trabajo respecto a un plano (100) de referencia,
que comprende: un sistema (110) láser giratorio que emite al menos dos haces (120) láser con forma de abanico no paralelos que divergen en un plano inclinado respecto al plano (100) de referencia; una unidad de radio configurada para medir una distancia (150) entre la herramienta de trabajo y el sistema (110) láser giratorio basándose en el tiempo transcurrido entre una señal de radio transmitida y una devuelta; y un detector (130) montado en la herramienta de trabajo para detectar cada uno de los haces láser, en el que la elevación de la herramienta de trabajo se determina basándose en un retardo de tiempo entre la recepción de los haces (120) láser con forma de abanico en el detector (130) y la distancia (150) entre la herramienta de trabajo y el sistema (110) láser giratorio
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E06021161.
Solicitante: MOBA - MOBILE AUTOMATION AG.
Nacionalidad solicitante: Alemania.
Dirección: VOR DEN EICHEN 4,65604 ELZ.
Inventor/es: SEHR,WILLIBALD.
Fecha de Publicación: .
Fecha Solicitud PCT: 9 de Octubre de 2006.
Fecha Concesión Europea: 28 de Octubre de 2009.
Clasificación Internacional de Patentes:
- G01C15/10A
- G01C5/00 FISICA. › G01 METROLOGIA; ENSAYOS. › G01C MEDIDA DE DISTANCIAS, NIVELES O RUMBOS; TOPOGRAFIA; NAVEGACION; INSTRUMENTOS GIROSCOPICOS; FOTOGRAMETRIA O VIDEOGRAMETRIA (medida del nivel de líquidos G01F; radio navegación, determinación de la distancia o velocidad mediante la utilización de efectos de propagación, p. ej. efecto Doppler, tiempo de propagación, de ondas de radio, disposiciones análogas que utilicen otras ondas G01S). › Medida de la altura; Medida de distancias transversales a la línea de vista; Nivelación entre puntos separados; Niveles topográficos (G01C 3/20, G01C 3/30 tiene prioridad).
Clasificación PCT:
- G01C5/00 G01C […] › Medida de la altura; Medida de distancias transversales a la línea de vista; Nivelación entre puntos separados; Niveles topográficos (G01C 3/20, G01C 3/30 tiene prioridad).
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
Aparato y método para determinar una elevación de herramientas de trabajo.
La presente invención se refiere a un aparato y a un método para determinar una elevación de una herramienta de trabajo con respecto a un plano de referencia y especialmente a un sistema de posicionamiento láser basado en radio.
Con el fin de dirigir una máquina de construcción o, más en general, una herramienta de trabajo en una obra de construcción, existe una necesidad de determinar no sólo una posición de la máquina de construcción a lo largo de direcciones horizontales, sino también obtener y controlar una elevación vertical. Existen diferentes métodos disponibles para levantar un perfil del terreno y dirigir herramientas de trabajo o máquinas de construcción de manera correspondiente. Por ejemplo, puede configurarse un sistema para medir la posición absoluta basándose en GPS (GPS = Global Positioning System, Sistema de Posicionamiento Global). Un sistema diferente mide las posiciones locales o relativas con respecto a un punto de referencia y usa, por ejemplo, lo que se denominan estaciones totales o transmisores láser. También se conocen combinaciones de ambos sistemas.
Además, hay disponibles herramientas de medición sencillas que usan un perfil del terreno existente como base sobre la que se desarrolla un nuevo perfil.
Se conocen, en general, sistemas de posicionamiento basados en GPS, por ejemplo, sistemas de bolsillo o montados. Para conseguir un aumento de la precisión de la posición, son posibles diferentes enfoques. Por ejemplo, puede usarse una estación de referencia o evaluación RTK (RTK = Real Time Kinematics, cinemática en tiempo real) y, dependiendo del esfuerzo y los recursos, es posible una precisión de posición en una región de un centí-metro.
En sistemas que usan la estación total, una estación de medición guiada por robot sigue un prisma montado en una pieza móvil y transmite las coordenadas evaluadas a un receptor, que evalúa basándose en estos datos una posición local del prisma dentro de la obra de construcción. El esfuerzo es significativo y en sistemas que usan la estación total sólo puede seguirse un prisma en un momento dado, lo que es desventajoso, aunque la precisión de posición alcanza ya el intervalo de menos de un centímetro.
Los sistemas basados en láser se usan en casos en los que el conocimiento acerca de la elevación por encima de un plano horizontal o de referencia es más importante que la posición exacta dentro del plano horizontal. Por ejemplo, éste es el caso para la construcción en una posición conocida o para construcción subterránea de edificios o de redes de saneamiento.
Los transmisores láser convencionales funcionan preferiblemente de manera que un espejo giratorio refleja a 90º un haz láser alineado en vertical a modo de punto. Como consecuencia, se genera un plano de luz horizontal con forma de abanico, que presenta una pequeña convergencia y alcanza un radio de aproximadamente 300 metros. Puesto que toda la unidad está sobre una plataforma autonivelante interna, se obtiene una referencia óptica estable, que puede detectarse mediante una disposición vertical de fotodiodos.
También se conocen sistemas combinados basados en GPS y láser. La señal de GPS se usa como una información de elevación aproximada. El sistema láser transmite haces láser con forma de abanico (tal como un haz láser con forma de Z, por ejemplo) y se usa para mejorar significativamente la precisión o resolución vertical, es decir, la información acerca de la elevación a lo largo del eje z. Este método se conoce como GPS milimétrico y combina la ventaja de medición de alta precisión con la posibilidad de que varios participantes usen el sistema simultáneamente. Sin embargo, técnicamente es muy costoso.
Tales sistemas se describen, por ejemplo, en el documento US 6.947.820. Otro sistema láser con dos o más transmisores en posiciones conocidas se describe en el documento US 6.630.993. En este caso, cada sistema láser barre de manera continua el lugar de trabajo y, a partir de los ángulos relativos entre la herramienta de trabajo y las posiciones del transmisor, puede calcularse la posición de la herramienta de trabajo. Otro sistema láser giratorio más se describe en el documento US 6.535.282 y usa mediciones de impulso estroboscópico y de retardo de tiempo para determinar los ángulos relativos y la posición de la herramienta de trabajo. Otro sistema láser que usa señales estroboscópicas de radio se describe en el documento WO 92/03701, en el que una señal de radio se transmite siempre que el sistema láser giratorio pasa por un punto específico y se usa una medición de retardo de tiempo para determinar el ángulo relativo. Con el fin de determinar las tres coordenadas de la posición se necesitan tres sistemas láser giratorios.
El objeto de la presente invención es proporcionar un aparato y un método para determinar una elevación de una herramienta de trabajo respecto a un plano de referencia con una precisión alta al tiempo que se proporciona un sistema barato y fácil de manejar que puede usarse por varios participantes a la vez.
Este objeto se consigue mediante un aparato según la reivindicación 1, y mediante un método según la reivindicación 10.
Según realizaciones de la presente invención, un aparato para determinar una elevación de una herramienta de trabajo respecto a un plano de referencia comprende un sistema láser giratorio que emite al menos dos haces láser con forma de abanico no paralelos que divergen en un plano inclinado respecto al plano de referencia, una unidad de radio configurada para medir una distancia entre la herramienta de trabajo y el sistema láser giratorio basándose en el tiempo transcurrido entre una señal de radio transmitida y una devuelta y un detector montado en la herramienta de trabajo para detectar cada uno de los haces láser. La elevación de la herramienta de trabajo se determina basándose en un retardo de tiempo entre la recepción de los haces láser con forma de abanico en el detector y la distancia entre la herramienta de trabajo y el sistema láser giratorio.
Según realizaciones de la presente invención, un método para determinar una elevación de una herramienta de trabajo respecto a un plano de referencia comprende emitir dos haces láser con forma de abanico no paralelos desde un sistema láser giratorio que divergen en un plano inclinado respecto al plano de referencia, detectar un retardo de tiempo entre una recepción de los haces láser con forma de abanico en la herramienta de trabajo y medir una distancia entre el sistema giratorio y el detector (130) en la herramienta de trabajo. La elevación de la herramienta de trabajo se evalúa basándose en el retardo de tiempo detectado y la distancia medida.
Según la presente invención, las realizaciones combinan dos tecnologías, en concreto, un sistema láser giratorio y un módulo de medición de distancia basado en radio.
El sistema de láser según la presente invención amplía el sistema láser convencional mencionado anteriormente de manera que no se genera un haz láser a modo de punto, sino con forma de abanico. En una realización preferida, el haz láser con forma de abanico comprende un haz láser con forma de V. El haz láser con forma de V puede conseguirse, por ejemplo, mediante una óptica especial. Además, el haz láser se transforma en la realización preferida en una "señal en V fija" giratoria mediante un aparato específico, que hace girar, por ejemplo, la óptica alrededor de un eje vertical a una velocidad angular específica. Si la velocidad de giro se ralentizara, tras una proyección de la "señal en V fija" sobre una pared, se formaría una "V" que se movería en una dirección horizontal. La altura de la "V" depende, por un lado, de la óptica elegida (y, por tanto, también está limitada) y, por otro lado, la altura de la "V" depende de la distancia del transmisor al receptor, es decir, a la pared, para este caso en concreto.
Los módulos de medición de distancia codificable, se basan, por ejemplo, en señales de radio (usando, por ejemplo, 5,8 GHz) y se conocen como LPR-B (LPR = Local Positioning Radar, Radar de Posicionamiento Local). Una caja negra transmite una señal de radio y otro aparato, ubicado a una distancia específica (con un máximo aproximado de 500 metros) recibe la señal y devuelve una señal codificada. El transmisor original recibe la información devuelta y evalúa, a partir de un retardo de tiempo entre la transmisión de la señal y la recepción de la señal de retorno,...
Reivindicaciones:
1. Aparato para determinar una elevación de una herramienta de trabajo respecto a un plano (100) de referencia, que comprende:
en el que la elevación de la herramienta de trabajo se determina basándose en un retardo de tiempo entre la recepción de los haces (120) láser con forma de abanico en el detector (130) y la distancia (150) entre la herramienta de trabajo y el sistema (110) láser giratorio.
2. Aparato según la reivindicación 1, en el que la unidad de radio comprende un traspondedor de radio, que está montado en el sistema láser giratorio.
3. Aparato según la reivindicación 1 o la reivindicación 2, en el que una sección transversal de los haces (120) láser con forma de abanico perpendicular a la dirección de propagación de los haces (120) láser con forma de abanico tiene forma de V, y en el que el vértice de la forma en V está en el plano (100) de referencia.
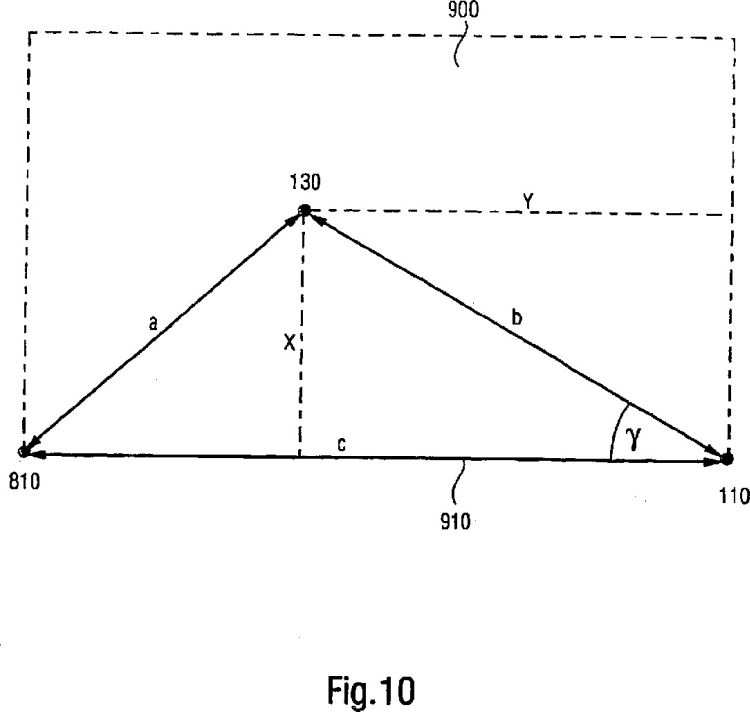
4. Aparato según una de las reivindicaciones 1 a 3, en el que la unidad de radio está configurada para medir la distancia (150) cuando los haces (120) láser con forma de abanico pasan por una marca (910) de referencia cero, y en el que el detector (130) está configurado para medir un periodo de tiempo desde el paso por la marca (910) de referencia cero hasta la detección de los haces (120) láser con forma de abanico en el detector (130), usándose la distancia (150) y el periodo de tiempo para determinar la posición de la herramienta de trabajo.
5. Aparato según una de las reivindicaciones 1 a 4, que comprende un detector (810) adicional para detectar los haces (120) láser con forma de abanico y para medir un retardo de tiempo adicional entre la recepción de los haces (120) láser con forma de abanico, en el que el detector (810) adicional comprende una unidad de radio adicional configurada para una medición de distancia adicional, y en el que el detector (810) adicional está ubicado en un punto de referencia y está configurado para determinar una elevación del punto de referencia sobre el plano (100) de referencia basándose en el retardo de tiempo adicional y la medición de distancia adicional.
6. Aparato según la reivindicación 5, en el que el detector (810) adicional, transmite una señal (825) de radio tras detectar los haces (120) láser con forma de abanico, y en el que el detector (130) está configurado para recibir la señal (825) de radio y para medir un periodo de tiempo adicional entre la recepción de la señal (825) de radio y la detección de los haces (120) láser con forma de abanico, usándose el periodo de tiempo adicional y la distancia (150) para determinar una posición de la herramienta de trabajo.
7. Aparato según la reivindicación 5 o la reivindicación 6, en el que la unidad de radio y la unidad de radio adicional están configuradas para una medición simultánea de distancias entre el sistema (110) láser giratorio, el detector (130) en la herramienta de trabajo y el detector (810) adicional, cuando los haces (120) láser con forma de abanico pasan por la marca (910) de referencia cero y/o cuando el detector (810) adicional detecta los haces (120) láser con forma de abanico.
8. Aparato según una de las reivindicaciones 4 a 7, que comprende una unidad de procesamiento configurada para determinar la elevación de la herramienta de trabajo y/o la posición de la herramienta de trabajo respecto al sistema (110) láser giratorio basándose en las mediciones de retardo de tiempo y de distancia y/o el periodo de tiempo y/o el periodo de tiempo adicional.
9. Aparato según una de las reivindicaciones 1 a 8, en el que el detector (130) comprende una disposición horizontal de fotocélulas (138).
10. Método para determinar una elevación de una herramienta de trabajo respecto a un plano (100) de referencia, que comprende:
11. Método según la reivindicación 10, que comprende además medir un periodo de tiempo entre el paso por una marca (910) de referencia cero de los haces (120) láser con forma de abanico y la detección por parte del detector (130) de los haces (120) láser con forma de abanico para determinar una posición de la herramienta de trabajo.
12. Método según la reivindicación 10 o la reivindicación 11, que comprende además medir un periodo de tiempo adicional entre el paso por un detector (810) adicional de los haces (120) láser con forma de abanico y la detección por parte del detector (130) de los haces (120) láser con forma de abanico con el fin de evaluar la posición de la herramienta de trabajo.
13. Método según la reivindicación 12, que comprende medir las distancias entre el sistema (110) láser giratorio, el detector (130) en la herramienta de trabajo y el detector (810) adicional simultáneamente con el fin de determinar la posición de la herramienta de trabajo.
Patentes similares o relacionadas:
Altímetro basado en sistemas radar, inercial y de presión atmosférica para vehículos aéreos, acrobáticos y no tripulados, del 15 de Febrero de 2017, de UNIVERSIDAD DE ALCALA.: Altímetro basado en sistemas radar, inercial y de presión atmosférica para vehículos aéreos, acrobáticos y no tripulados. El objeto de la invención […]
Procedimiento de corrección de la altitud barométrica para una aeronave, del 1 de Abril de 2015, de THALES: Procedimiento de corrección de la altitud barométrica de aeronaves , caracterizado porque comprende las etapas siguientes: • una etapa previa de división […]
Dispositivo para fijación y nivelación de accesorios de saneamiento en paredes, del 28 de Enero de 2015, de CASPRO, S.A.: 1. Dispositivo para fijación y nivelación de accesorios de saneamiento en paredes , el cual comprende: - un cuerpo laminar , el cual comprende a su vez: - una […]
DISPOSITIVO DE NIVELACIÓN Y ALINEAMIENTO DE PIEZAS DE RECUBRIMIENTO DE SUPERFICIES, del 27 de Mayo de 2013, de TORRENTS RESEARCH, S. L: 1. Dispositivo de nivelación y alineamiento de piezas de recubrimiento de superficies, adecuado para la colocación sobre una superficie de piezas de […]
 DISPOSITIVO PARA LA MEDICIÓN DE LA VELOCIDAD Y LA DIRECCIÓN DEL VIENTO CON VISTAS A LA IMPLANTACIÓN DE AEROGENERADORES EÓLICOS, del 8 de Agosto de 2012, de LYASOTA, Andriy: Dispositivo para la medición de la velocidad y la dirección del viento con vistas a la implantación de aerogeneradores eólicos, que comprende un globo , […]
DISPOSITIVO PARA LA MEDICIÓN DE LA VELOCIDAD Y LA DIRECCIÓN DEL VIENTO CON VISTAS A LA IMPLANTACIÓN DE AEROGENERADORES EÓLICOS, del 8 de Agosto de 2012, de LYASOTA, Andriy: Dispositivo para la medición de la velocidad y la dirección del viento con vistas a la implantación de aerogeneradores eólicos, que comprende un globo , […]
 DISPOSITIVO DE MEDICION ELECTRONICA DE ALTURA PARA EQUIPOS TOPOGRAFICOS, del 30 de Mayo de 2011, de ESTEBAN HOYAS, ANTONIO GONZALEZ JIMENEZ, JAVIER CABRERO IGUACEL, MARIO SANTIAGO: Dispositivo de medición electrónica de altura para equipos topográficos.El dispositivo de la invención, como parte de montaje para un teodolito o equipo topográfico de […]
DISPOSITIVO DE MEDICION ELECTRONICA DE ALTURA PARA EQUIPOS TOPOGRAFICOS, del 30 de Mayo de 2011, de ESTEBAN HOYAS, ANTONIO GONZALEZ JIMENEZ, JAVIER CABRERO IGUACEL, MARIO SANTIAGO: Dispositivo de medición electrónica de altura para equipos topográficos.El dispositivo de la invención, como parte de montaje para un teodolito o equipo topográfico de […]
APARATO UNI-PERSONA PARA TOPOGRAFIA DE PLAYAS., del 16 de Julio de 2005, de DELGADO FERNANDEZ,IRENE: Aparato uni-persona para realizar topografía de playas. Compuesto de dos unidades fundamentales: una regla y un sistema de dos varas, una […]
DISPOSITIVO PARA NIVELAR PLACAS RÍGIDAS DE REVESTIMIENTO, del 18 de Noviembre de 2011, de PERALES SERRANO, LUIS MIGUEL: 1. Dispositivo para nivelar placas rígidas de revestimiento dispuestas sobre una superficie a revestir, caracterizado porque comprende una pieza de nivelación […]