APARATO PARA MULTILATERACION Y METODO.
Sistema de multilateración (1, 2) para determinar una posición de un avión (16) que transmite una señal de radio,
que comprende un primer controlador (14) y primeros receptores asociados (4-8) para llevar a cabo una multilateración en función de los tiempos de llegada de la señal de radio en respectivos receptores de entre los primeros receptores asociados (4-8); un segundo controlador (15) y segundos receptores asociados (9-13) para llevar a cabo una multilateración en función de los tiempos de llegada de la señal de radio en los segundos receptores asociados (9-13), caracterizado porque el segundo controlador (15) está adaptado para proporcionar al primer controlador (14) datos de diferencia temporal de llegada, para la recepción de la señal en el segundo conjunto de receptores asociados (9-13), y en el que el primer controlador (14) está adaptado para llevar a cabo una multilateración en función del tiempo de llegada de la señal en los primeros receptores (4-8) y de los datos de la diferencia temporal de llegada recibidos desde el segundo controlador (15)
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E07109293.
Solicitante: ROKE MANOR RESEARCH LIMITED.
Nacionalidad solicitante: Reino Unido.
Dirección: OLD SALISBURY LANE,ROMSEY, HAMPSHIRE SO51 0ZN.
Inventor/es: QUILTER,TIMOTHY JOHN, BRANDWOOD,DAVID HERBERT.
Fecha de Publicación: .
Fecha Solicitud PCT: 31 de Mayo de 2007.
Fecha Concesión Europea: 30 de Junio de 2010.
Clasificación Internacional de Patentes:
- G01S5/00R4
- G01S5/06 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 5/00 Establecimiento de la posición mediante la coordinación de dos o más determinaciones de dirección o de líneas de posición; Establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia. › La posición de la fuente se determina mediante la coordinación de una pluralidad de líneas de posición definidas mediante medidas relacionadas con la diferencia de caminos (G01S 5/12 tiene prioridad).
Clasificación PCT:
- G01S5/06 G01S 5/00 […] › La posición de la fuente se determina mediante la coordinación de una pluralidad de líneas de posición definidas mediante medidas relacionadas con la diferencia de caminos (G01S 5/12 tiene prioridad).
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
Aparato para multilateración y método.
Esta invención se refiere a un aparato y un método para la multilateración de la posición de un objeto.
La multilateración es un proceso mediante el que puede fijarse la localización de un objeto a partir de una radiotransmisión realizada desde el objeto y recibida en una serie de estaciones de estación receptora. El tiempo de llegada a las estaciones receptoras es anotado y entregado a una unidad central de proceso donde, con el conocimiento de la posición de las estaciones receptoras, se determina la posición del objeto. Alternativamente, las señales se pasan sobre un enlace a la unidad central de proceso, que determina el tiempo de llegada a la estación receptora con referencia al retardo provocado por el enlace. En el controlador central se lleva a cabo un proceso de correlación de señal, en el que las señales recibidas se comparan con una copia de la señal transmitida.
En concreto, los sistemas de multilateración se utilizan para proporcionar la posición de un avión en vuelo o en pistas de aeropuertos. Una señal transmitida por un transmisor en el avión es recibida por una serie de estaciones receptoras en localizaciones conocidas en tierra. La señal es transmitida por un transpondedor de radar secundario de vigilancia (SSR, Secondary Surveillance Radar) de 100 MHz, y es de uno entre una serie de formatos o tipos de código conocidos tales como el modo A/C y el modo S. Midiendo el tiempo de llegada de la señal en cada una de las estaciones receptoras (o deduciéndolo, tal como se ha mencionado anteriormente), y conociendo sus localizaciones, es posible calcular la posición del avión en el momento de la transmisión. Se describe una técnica de multilateración semejante en la patente GB 2 250 154.
En la publicación técnica TE In focus Informaten aus dem Beriech Forschung und Entwicklung der DFS Deutsche Flugsicherung GmbH 2/03 XP007907344 y en Eurocontrol Wide Area Multilateration Report en EATMP TRS 131/04 versión 1.1 XP007907348, se ha propuesto una combinación de posiciones determinadas por diferentes sistemas de posicionamiento, para proporcionar una visualización de la posición de un avión. Sin embargo, se cree que los sistemas combinados propuestos, funcionando tal como lo hacen con temporizaciones de sistema diferentes, pueden proporcionar errores de posición que son indeseables.
La presente invención surgió de una constatación por parte del inventor, de que existe una discontinuidad en la cobertura entre dos o más sistemas de multilateración en localizaciones adyacentes, que puede paliarse o eliminarse intercambiando los datos de la diferencia temporal de llegada entre los sistemas, para una señal recibida desde el objeto en las estaciones receptoras de los dos sistemas.
Por consiguiente, la invención da a conocer a un aparato y un método como los enunciados en las reivindicaciones independientes, y da a conocer un sistema de multilateración que comprende un controlador para la recepción de datos relativos a la llegada de una señal transmitida desde un objeto a posicionar desde un primer conjunto de estaciones receptoras, y datos de diferencia temporal de llegada derivados de un segundo conjunto de estaciones receptoras que reciben asimismo la señal desde el objeto, controlador el cual lleva a cabo un proceso de multilateración sobre los datos para determinar la localización del objeto.
Al recibir los datos de la diferencia temporal de llegada desde el segundo conjunto de estaciones receptoras y utilizar tales datos, se elimina o por lo menos se reduce sensiblemente el efecto de que el segundo conjunto de estaciones receptoras no sea síncrono temporalmente con un nivel elevado de precisión con el primer conjunto. Éste no sería el caso si se procesarán los datos del tiempo de llegada. Por lo tanto, utilizando la invención, pueden utilizarse datos originados en conjuntos diferentes de estaciones receptoras sin requerirse que estén sincronizados todos los conjuntos. De este modo, la invención permite el uso de datos procedentes de dos o más sistemas de multilateración diferentes, cada uno de los cuales puede consistir en equipamiento de fabricantes diferentes. Esto puede ocurrir típicamente, tal como se describe en la realización específica, en los límites de zonas de control de vuelo o de países.
Los datos procedentes del primer conjunto de estaciones receptoras pueden ser datos del tiempo de llegada o de la diferencia temporal de llegada.
En una primera realización de la invención, los datos de la diferencia temporal de llegada procedentes del segundo conjunto de estaciones receptoras son enviados al controlador sin necesidad de que se haga una solicitud. En una realización alternativa, los datos son enviados después de que se realice una solicitud de los datos. La solicitud puede ser para datos procedentes de todas las estaciones receptoras en el segundo conjunto, o puede especificar qué estaciones receptoras deben proporcionar datos.
Las estaciones a utilizar para proporcionar los datos de posicionamiento pueden determinarse cuando un objetivo entra en una zona concreta, o esto puede hacerse en referencia a una trayectoria prevista.
Preferentemente, los datos de diferencia temporal de llegada se obtienen a partir del tiempo de llegada de una señal recibida en un segundo conjunto de estaciones receptoras mediante un segundo controlador, el cual comunica los datos de diferencia temporal de llegada sobre el enlace de comunicación al controlador.
En la realización específica, se intercambian datos entre dos sistemas de multilateración para determinar la posición de un avión. Pueden disponerse varios agrupamientos de estaciones receptoras entre los dos sistemas, para posicionar el avión en dos o tres dimensiones, para varias localizaciones del avión. Cada sistema tiene un controlador y los dos controladores pueden interactuar conjuntamente para intercambiar los datos, o pueden interactuar con otro controlador. Cualquiera de los controladores puede llevar a cabo el proceso de multilateración sobre los datos intercambiados.
A continuación se describirá una realización específica de la invención, solamente a modo de ejemplo con referencia a, y tal como se ilustra en, los dibujos, en los cuales:
la figura 1 muestra en forma de diagrama de bloques esquemático, dos sistemas de multilateración en dos países vecinos, funcionando el controlador del primer sistema de acuerdo con la invención; y
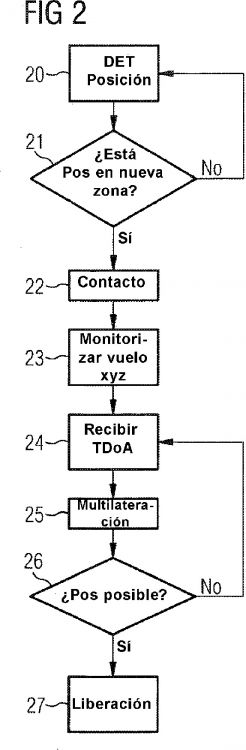
la figura 2 es un diagrama explicativo que muestra etapas del método llevadas a cabo por el controlador de la figura 1.
Tal como se muestra en la figura 1, se disponen dos sistemas de multilateración 1 y 2 para cubrir dos países vecinos A y B que tienen una frontera teórica. Los sistemas de multilateración 1, 2 comprenden una respectiva serie de estaciones receptoras 4 a 8 y 9 a 13, que proporcionan datos de señal del momento de llegada, a controladores respectivos 14 y 15 a través de redes de área extendida respectivas. La señal es una señal SSR en modo A (aunque puede ser otro tipo de señal, tal como en modo C o modo S) y se transmite desde un objeto a localizar, que en este caso es un avión 16. Los controladores llevan a cabo un proceso de multilateración utilizando el tiempo de llegada de la información de señal proporcionada por las estaciones receptoras, y posiciones conocidas de las estaciones receptoras. Dicho proceso será bien conocido para un experto en la materia y se describe, por ejemplo, en el documento GB 2 250 154 A. De este modo, el sistema 1 puede localizar el avión en el interior de la zona de cobertura de las estaciones receptoras 4 a 8, y el sistema 2 puede localizarlo en el interior de la zona de cobertura de las estaciones receptoras 9 a 13.
Sin embargo, se produce un problema cuando el avión 16 sigue una trayectoria de vuelo 17. Mientras se desplaza desde la zona de cobertura del primer sistema 1 a la zona de cobertura de la zona 2, el avión 16 pasa a través de una zona 18 donde no es ideal la cobertura de ninguno de los sistemas. Por sencillez, esta zona 18 se muestra centrada en la frontera 3, aunque se apreciará que una situación real será más compleja, y dependerá en gran parte de la localización de la estación receptora y de la topografía local. Esto significa que utilizando los métodos de la técnica anterior, el avión 16 no puede posicionarse con la precisión suficiente por seguridad en el interior de la zona 18. Esto puede tratarse asegurando que las trayectorias de vuelo permitidas en el interior de la zona 18 tienen la separación suficiente para asegurar...
Reivindicaciones:
1. Sistema de multilateración (1, 2) para determinar una posición de un avión (16) que transmite una señal de radio, que comprende un primer controlador (14) y primeros receptores asociados (4-8) para llevar a cabo una multilateración en función de los tiempos de llegada de la señal de radio en respectivos receptores de entre los primeros receptores asociados (4-8); un segundo controlador (15) y segundos receptores asociados (9-13) para llevar a cabo una multilateración en función de los tiempos de llegada de la señal de radio en los segundos receptores asociados (9-13), caracterizado porque el segundo controlador (15) está adaptado para proporcionar al primer controlador (14) datos de diferencia temporal de llegada, para la recepción de la señal en el segundo conjunto de receptores asociados (9-13), y en el que el primer controlador (14) está adaptado para llevar a cabo una multilateración en función del tiempo de llegada de la señal en los primeros receptores (4-8) y de los datos de la diferencia temporal de llegada recibidos desde el segundo controlador (15).
2. Sistema como el reivindicado en la reivindicación 1, que comprende medios (14, 15) para determinar cuándo el avión está aproximándose a una zona concreta (18) y ordenar al primer controlador (14) que lleve a cabo la multilateración utilizando el tiempo de llegada de la señal y los datos de diferencia temporal de llegada.
3. Sistema como el reivindicado en la reivindicación 2, en el que el primer controlador incluye medios para solicitar del segundo controlador los datos de diferencia temporal de llegada.
4. Método de multilateración de avión, para determinar la posición de un avión que transmite una señal de radio, que comprende:
proporcionar un controlador (14) y primeros receptores asociados (4-8) para llevar a cabo una multilateración basada en los tiempos de llegada de la señal de radio en receptores respectivos de entre los primeros receptores asociados (4-8);
proporcionar un segundo controlador (15) y segundos receptores asociados (9-13) para llevar a cabo una multilateración en función de tiempos de llegada de la señal de radio en los segundos receptores asociados (9-13), caracterizado por las etapas de proporcionar el segundo controlador (15) al primer controlador (14) datos de diferencia temporal de llegada para la recepción de la señal en el segundo conjunto de receptores asociados (9-13), y de llevar a cabo por parte del primer controlador (14) una multilateración basada en el tiempo de llegada de la señal en los primeros receptores (4-8) y en los datos de diferencia temporal de llegada recibidos desde el segundo controlador (15).
5. Método como el reivindicado en la reivindicación 4, que comprende una etapa preliminar de determinación de la aproximación del avión a una zona concreta, antes de llevar a cabo el método.
6. Método como el reivindicado en la reivindicación 4 ó 5, en el que un primer controlador solicita los datos de diferencia temporal de llegada de un segundo controlador.
Patentes similares o relacionadas:
Localización de una baliza de emergencia, del 20 de Mayo de 2020, de THALES: Un procedimiento implementado por ordenador para procesar la señal transmitida por una baliza de emergencia, siendo recibida dicha señal por […]
Mitigación de distorsiones multitrayectoria para geolocalización basada en TDOA, del 26 de Junio de 2019, de Elbit Systems Bmd and Land EW - Elisra Ltd: Un método para determinar una localización de un transmisor de radiofrecuencia RF en la presencia de interferencia multitrayectoria, comprendiendo el método los procedimientos […]
Sistema de localización geográfica de un emisor de señales radioeléctricas situado en la superficie de la Tierra y procedimiento asociado de interferometría distribuida, del 13 de Junio de 2019, de THALES: Sistema de localización geográfica de al menos un emisor (ES) de señales radioeléctricas situado en la superficie de la Tierra, que comprende: […]
Sistema de tratamiento de señales procedentes de un emisor con fines de datación de señales y de localización del emisor y estación de recepción asociada, del 19 de Febrero de 2019, de ZODIAC DATA SYSTEMS: Estación de recepción (1x) de un sistema de tratamiento de señales procedentes de un emisor a localizar, estando la estación de recepción (1x) […]
Aparato, procedimiento y programa informático para proporcionar una frontera virtual, del 11 de Enero de 2017, de FRAUNHOFER-GESELLSCHAFT ZUR FORDERUNG DER ANGEWANDTEN FORSCHUNG E.V.: Sistema , que comprende: un sistema de localización geográfica en tiempo real que comprende una pluralidad de receptores que rodean un área bajo […]
Procedimiento y sistema de calibración de receptores y localización de objetos simultáneas para multilateración, del 23 de Noviembre de 2016, de KARLSRUHER INSTITUT FUR TECHNOLOGIE: Un procedimiento de multilateración de al menos uno de una pluralidad de P objetos, que usa: una pluralidad de N sensores ubicados en posiciones conocidas […]
Métodos y aparatos para alterar el tiempo de medición y el ancho de banda durante una medición, del 14 de Septiembre de 2016, de TELEFONAKTIEBOLAGET LM ERICSSON (PUBL): Un método para un equipo de usuario para manejar un cambio de célula, estando el equipo de usuario comprendido en una red de comunicaciones […]
Geolocalización de emisores, del 10 de Agosto de 2016, de SELEX ES LTD: Método para localizar un emisor de ondas electromagnéticas utilizando una pluralidad de receptores, comprendiendo el método las etapas de: […]