PERFECCIONEMIENTO DE PROCEDIMIENTO DE MANDO DE ORGANOS MOTORES EN UNA MAQUINA-HERRAMIENTA.
Procedimiento de mando de órganos motores (6) de una máquina-herramienta (1) que permite la realización de piezas (2),
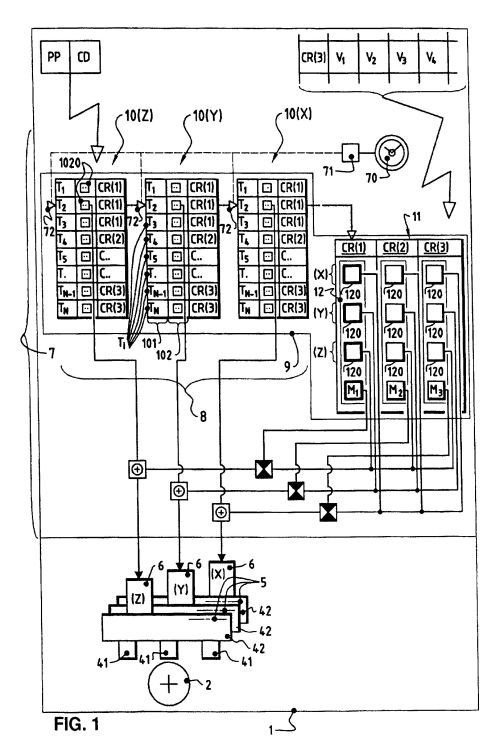
y dicha máquina-herramienta comprende, . por una parte, por lo menos un primer elemento (41) que puede actuar sobre la pieza (2) que debe mecanizarse, siendo dicho primer elemento (41) móvil con respecto a por lo menos un eje (5) particular al que está asociado, . por otra parte, por lo menos un órgano motor (6) que puede provocar el desplazamiento de cada primer elemento (41) según cada eje (5) al que está asociado, estando controlado cada órgano motor (6) mediante un dispositivo de mando (7) que emplea por lo menos una tabla de etapas (10) establecida con anterioridad en función del perfil de la pieza (2) que debe mecanizarse, estando definida cada tabla de etapas (10) mediante una sucesión de instantes elementales (Ti) a cada uno de los cuales está asociada una primera consigna de desplazamiento incremental, dicha primera consigna (1020), que debe imponerse al órgano motor (6), a partir del instante elemental (Ti) considerado, y cuyo valor se determina en función del perfil ("PP") de la pieza (2) que debe mecanizarse y de las características dinámicas ("CD") de la máquina-herramienta (1), estando dicho procedimiento caracterizado porque: - en el curso de un primer grupo de etapas operativas, . se crea un código de referencia (CR) para cada primer elemento (41), siendo dicho código de referencia (CR) específico para cada primer elemento (41) de tal modo que permita la distinción de los primeros elementos (41) entre sí mediante la lectura de dicho código de referencia (CR), . se constituye un registro de corrección (11) en el que, a cada código de referencia (CR) de un primer elemento (41), se le asocia por lo menos un grupo (12) de informaciones, por lo menos algunas de ellas, .. por una parte, constituyen consignas, dichas segundas consignas (120), de corrección del desplazamiento incremental de un órgano motor (6) afectado en el desplazamiento del primer elemento (41) considerado, teniendo en cuenta que una corrección del desplazamiento incremental comprende por lo menos una de las dos correcciones que constituyen una corrección de velocidad y una corrección de posición, y, .. por otra parte, cada una de ellas está constituida, a saber, por lo menos por una componente (121, 122, 123, 124) teniendo cada una un valor que se puede ajustar independientemente del perfil de la pieza (2), constituyendo la suma de dichas componentes (121, 122, 123, 124) el valor total de corrección de la segunda consigna (120) afectada. . se buscan las tablas de etapas (10) cuya lectura genera el desplazamiento por lo menos de un primer elemento (41), y en cada instante elemental (Ti) de desplazamiento de cada tabla de etapas (10) que implica un dicho primer elemento (41), se asocia el código de referencia (CR) específico de dicho primer elemento (41), - en el curso de un segundo grupo de etapas operativas, . durante una etapa preparatoria situada, a más tardar, justo antes de la lectura de las tablas de etapas (10) por parte del dispositivo de mando (7), se selecciona y se ajusta el valor por lo menos de una componente (121, 122, 123, 124) de una segunda consigna (120) asociada a un primer elemento (41) afectado por lo menos por una de dichas tablas de etapas (10) e identificable mediante su código de referencia (CR), y . durante la lectura de cada tabla de etapas (10) por parte de dicho dispositivo de mando (7), en cada instante elemental (Ti) de dicha tabla de etapas (10), se fuerza al dispositivo de mando (7), .. por una parte, a verificar la presencia de un código de referencia (CR) asociado a dicho instante elemental (Ti) y, y cuando se detecta dicho código de referencia (CR), a consultar el registro de corrección (11) asociado a dicho código de referencia (CR) para conocer el valor por lo menos de una componente (121, 122, 123, 124) de la segunda consigna (120) que ha sido prevista, .. por otra parte, a determinar un valor total de desplazamiento incremental que debe imponerse al órgano motor (6) afectado, y ello se hace sumando, ... el valor de la primera consigna (1020) que se ha programado en el instante elemental (Ti) considerado, y ... por lo menos una fracción predeterminada (M) del valor por lo menos de una componente (121, 122, 123, 124) de la segunda consigna (120).
Tipo: Resumen de patente/invención.
Solicitante: TORNOS SA.
Nacionalidad solicitante: Suiza.
Dirección: RUE INDUSTRIELLE 111,2740 MOUTIER.
Inventor/es: PAROZ, CEDRIC, WYSS,MARC, VUILLEUMIER,MICHEL.
Fecha de Publicación: .
Fecha Solicitud PCT: 13 de Septiembre de 2005.
Fecha Concesión Europea: 3 de Diciembre de 2008.
Clasificación PCT:
- G05B19/404 FISICA. › G05 CONTROL; REGULACION. › G05B SISTEMAS DE CONTROL O DE REGULACION EN GENERAL; ELEMENTOS FUNCIONALES DE TALES SISTEMAS; DISPOSITIVOS DE MONITORIZACION O ENSAYOS DE TALES SISTEMAS O ELEMENTOS (dispositivos de maniobra por presión de fluido o sistemas que funcionan por medio de fluidos en general F15B; dispositivos obturadores en sí F16K; caracterizados por particularidades mecánicas solamente G05G; elementos sensibles, ver las subclases apropiadas, p. ej. G12B, las subclases de G01, H01; elementos de corrección, ver las subclases apropiadas, p. ej. H02K). › G05B 19/00 Sistemas de control por programa (aplicaciones específicas, ver los lugares apropiados, p. ej. A47L 15/46; relojes que implican medios anejos o incorporados que permiten hacer funcionar un dispositivo cualquiera en un momento elegido de antemano o después de un intervalo de tiempo predeterminado G04C 23/00; marcado o lectura de soportes de registro con una información digital G06K; registro de información G11; interruptores horarios o de programa horario que se paran automáticamente cuando el programa se ha realizado H01H 43/00). › caracterizado por disposiciones de control para la compensación, p. ej. la holgura, el exceso, el desfase de la herramienta, el desgaste de la herramienta, la temperatura, los errores de construcción de la máquina, la carga, la inercia (G05B 19/19, G05B 19/41 tiene prioridad).
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Patentes similares o relacionadas:
Método de evaluación de un proceso de fabricación o mecanizado en el que se realiza al menos una etapa de mecanizado en una banda de acero, del 9 de Octubre de 2019, de VDEH-BETRIEBSFORSCHUNGSINSTITUT GMBH: Método para la evaluación de un proceso de producción en el que se lleva a cabo al menos una etapa de producción en al menos un producto, en el que • un dispositivo […]
Aparato de control numérico, del 11 de Septiembre de 2019, de MITSUBISHI ELECTRIC CORPORATION: Un dispositivo de control numérico para mecanizar un objeto de mecanizado moviendo una herramienta y el objeto de mecanizado uno en relación […]
Dispositivo de configuración del número de compensación, del 21 de Agosto de 2019, de CITIZEN WATCH CO. LTD.: Un dispositivo de configuración del número de compensación que comprende: un monitor que muestra una pantalla de selección de superficie de […]
Procedimiento para aumentar la seguridad frente a la avería de un eje de avance y dispositivo de control de eje, del 7 de Agosto de 2019, de OTTO BIHLER HANDELS-BETEILIGUNGS-GMBH: Procedimiento para la corrección de ubicación en función de la carga de la posición nominal que debe adoptarse de un eje de avance accionado eléctricamente […]
Procedimiento de compensación de la gravedad en un instrumento, del 12 de Junio de 2019, de THALES: Procedimiento de compensación de la gravedad en un instrumento en tierra, estando el instrumento destinado a funcionar en órbita, que consiste: […]
Máquina-herramienta, del 27 de Marzo de 2019, de Citizen Machinery Co., Ltd: Máquina-herramienta que comprende: unos medios de sujeción de herramienta de corte para sujetar una herramienta de corte para […]
Método para control de vibraciones en piezas, del 24 de Enero de 2019, de IDEKO, S. COOP: Método para control de vibraciones en piezas , siendo las piezas deformables a flexión al ser mecanizadas, caracterizado por que comprende los pasos de: • seleccionar […]
Dispositivo de Control, del 21 de Febrero de 2018, de ELSNER ELEKTRONIK GMBH: Dispositivo de control para por lo menos una protección visual y/o solar y/o para por lo menos una ventana, con por lo menos una unidad de actor (12a; 12b) para […]