PROCEDIMIENTO Y DISPOSITIVO PARA COMPROBAR LA CARGA DE UN DISPOSITVO DE TRANSPORTE CARGADO CON OBJETOS.
Procedimiento para comprobar la carga de un dispositivo de transporte (10),
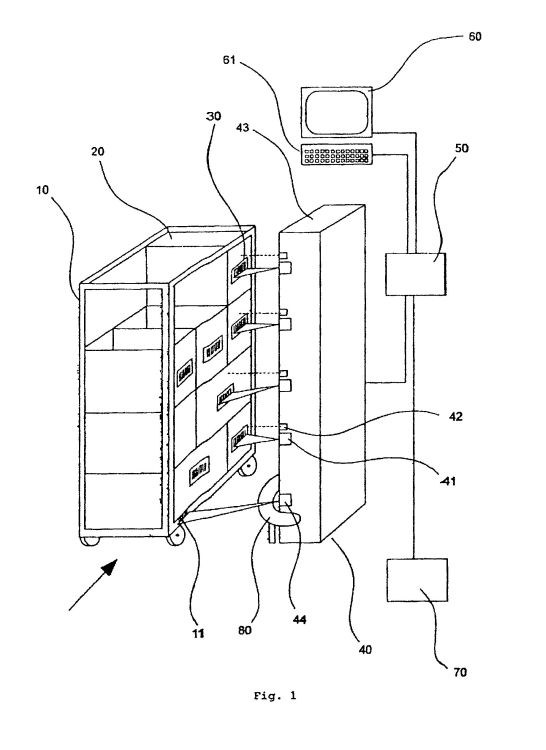
estando cargado el dispositivo de transporte con uno o varios objetos (20), y estando dotados los objetos de un medio de identificación (30) que se puede detectar ópticamente, figurando en un medio de identificación (30) por lo menos informaciones relativas al lugar de destino del objeto respectivo (20), caracterizado por las siguientes características: #- detección del lugar de destino del dispositivo de transporte (10); #- paso del dispositivo de transporte (10) junto con los objetos (20) frente a un equipo de escaneado (40), detectando el equipo de escaneado (40) los medios de identificación (30) con por lo menos dos escáneres (41) dispuestos uno sobre el otro; #- detección de la altura de carga de los objetos (20) cuando el dispositivo de transporte (10) con los objetos (20) pasa frente al equipo de escaneado (40), explorando el equipo de escaneado (40) los objetos (20) con un mínimo de dos barreras de luz (41) dispuestas una sobre la otra; #- transmisión a una unidad de evaluación (50) de las informaciones detectadas por los medios de identificación (30) y las informaciones relativas a la altura de carga,; #- evaluación de los medios de identificación (30) detectados en la unidad de evaluación (50), determinando el lugar de destino que figura en un medio de identificación (30); #- comparación del lugar de destino de un objeto (20) detectado en cada caso con el lugar de destino del dispositivo de transporte (10); #- comparación de la altura de carga detectada con las informaciones existentes en la unidad de evaluación (50) relativas a los tamaños de los objetos (20) correspondientes a los medios de identificación (30) detectados; #- emisión de una primera señal A por la unidad de evaluación (50) en el caso de que un lugar de destino de un objeto (20) detectado por medio de un medio de identificación (30) no coincida con el lugar de destino del dispositivo de transporte (10); y #- emisión de una segunda señal B por la unidad de evaluación (40) en el caso de que una comprobación de plausibilidad indique que en una zona del dispositivo de transporte (10) está posicionado un objeto (20) que no presenta ningún medio de identificación (30) o uno no legible.
Tipo: Resumen de patente/invención.
Solicitante: DEUTSCHE POST AG.
Nacionalidad solicitante: Alemania.
Dirección: CHARLES-DE-GAULLE-STRASSE 20,53113 BONN.
Inventor/es: TABELLION,WOLFGANG, HAMMEN,MARTIN.
Fecha de Publicación: .
Fecha Concesión Europea: 10 de Junio de 2009.
Clasificación PCT:
- B65G1/137 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65G DISPOSITIVOS DE TRANSPORTE O ALMACENAJE, p. ej. TRANSPORTADORES PARA CARGAR O BASCULAR, SISTEMAS TRANSPORTADORES PARA TALLERES O TRANSPORTADORES NEUMATICOS DE TUBOS (embalajes B65B; manipulación de material delgado o filiforme, p. ej. hojas de papel o fibras B65H; grúas B66C; aparatos de elevación o arrastre,p. ej. montacargas, B66D; dispositivos para elevar o bajar mercancías para carga y descarga, p. ej. carretillas elevadoras, B66F 9/00; vaciado de botellas, jarras, latas, barricas, barriles o contendores similares, no previstos en otro lugar, B67C 9/00; distribución o trasvase de líquidos B67D; llenado o descarga de contenedores para gases licuados, solidificados o comprimidos F17C; sistemas de conducción para fluídos F17D). › B65G 1/00 Almacenamiento de objetos, individualmente o con un cierto orden, en almacenes o depósitos (combinaciones de transportadores en almacenes, tiendas o talleres, B65G 37/00; apilado de objetos B65G 57/00; sacado de objetos de pilas B65G 59/00; máquinas de carga B65G 65/02). › con disposiciones o medios de control automáticos para coger los objetos que deben ser sacados.
Patentes similares o relacionadas:
Sistema de preparación para la expedición con un robot de transporte para pasar por debajo de estanterías individuales y carros de transporte, del 13 de Mayo de 2020, de KNAPP AG: Sistema de preparación para la expedición para preparar para la expedición artículos almacenados en un almacén con estanterías en bolsas de transporte con […]
Procedimiento de recogida de objetos con robots lanzadera, del 22 de Abril de 2020, de SOLYSTIC: Procedimiento de procesamiento de objetos en un centro logístico que comprende una zona de almacenaje de los objetos dividida en segmentos de almacenaje adyacentes […]
Sistema de gestión de inventario que usa vehículo guiado automatizado, del 25 de Marzo de 2020, de Hanmi IT Co., Ltd: Un sistema de gestión de inventario que usa un vehículo guiado automatizado, comprendiendo el sistema de gestión de inventario: una pluralidad […]
Sistema de almacenamiento y de preparación de pedidos, del 11 de Marzo de 2020, de SSI Schäfer Automation GmbH (DE): Procedimiento para hacer funcionar un sistema de almacenamiento y de preparación de pedidos , en el que una pluralidad de manipuladores procesa una pluralidad de […]
Sistema de preparación para la expedición de artículos para la preparación de pedidos y de lotes, del 19 de Febrero de 2020, de KNAPP AG: Sistema de preparación para la expedición para preparar para la expedición artículos desde contenedores de almacenamiento en contenedores […]
Estación de preparación para la expedición para preparar artículos en contenedores de pedido y bolsas de transporte para la preparación de pedidos y de lotes, del 19 de Febrero de 2020, de KNAPP AG: Estación de preparación para la expedición para preparar para la expedición artículos de contenedores de almacenamiento en contenedores de pedido según […]
Dispositivo para recoger y depositar selectivamente artículos en un almacén automático, del 12 de Febrero de 2020, de Modula S.p.A: Dispositivo para recoger y depositar selectivamente artículos, destinado a un almacén automático que comprende: un plano de soporte para el soporte temporal […]
Dispositivo de aparcamiento robotizado y método para manejarlo, del 23 de Octubre de 2019, de Ocado Innovation Limited: Un sistema de aparcamiento robotizado que comprende al menos un dispositivo 50 de manipulación de carga y una pluralidad de contenedores 10 que alojan […]