VEHICULO SUBACUATICO MULTIFUNCION DE OPERACION REMOTA.
1. Vehículo subacuático multifunción de operación remota.
Caracterizado por un control de superficie (41-23),
unido a un cable umbilical (41-22) que a su vez termina en una unión electromecánica con la superestructura ROV subacuática (41- 28).
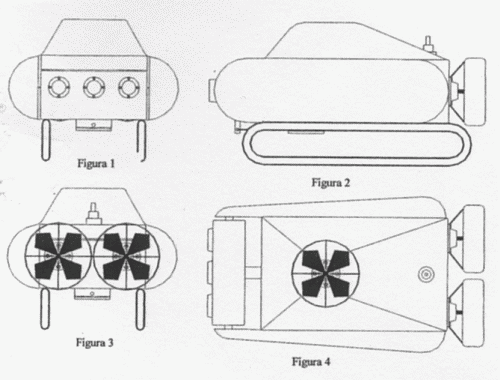
Dicha superestructura está compuesta de carcasa (45-47), cabeza (42-30), cuerpo (42-29), circuito de control (44-44) y periféricos.
El cuerpo se ensambla electromecánicamente a la cabeza mediante pasamuros herméticos (42-31), y a los periféricos (42-32) y umbilical (46-48) por medio de conectores herméticos IP68 (42-33).El cuerpo tiene salidas mecánicas a las hélices (42- 34) a través de los rodamientos y retenes herméticos, anclados al cuerpo por tornillería de aluminio. Los conectores IP68 se unen mecánicamente al cuerpo por medio de junta tórica y tuerca pasante (42-35). Un par de patines (42-36).
La cabeza es un compartimento estanco que se ensambla electromecánicamente al cuerpo mediante un pasamuros (43-38). Está compuesta por un par de lámparas halógenas dicroicas (43-39) dispuestas a ambos lados de una cámara color CCD (43-40), para la hermeticidad de las lámparas halógenas dicroicas y la cámara color CCD se dispone de ventanas de discos de policarbonato (43-41), unidas a la cabeza mediante tornillería y junta tórica (43-42) internamente se encuentra ubicado el sensor de presión (43-43).
El circuito de control se encuentra situado en el interior del cuerpo (42-29) y acciona los motores (44-45) los periféricos, la cámara color CCD y lámparas halógenas dicroicas situadas en la cabeza, alimentándose de las baterías (44-46).
La carcasa es una estructura de fibra de vidrio/poliéster rellena de espuma de expansión de alta densidad y se ancla al cuerpo mediante unos tensores de aluminio.
Los periféricos son accionados por el circuito de control y se encuentran ubicados en la parte externa del cuerpo.
El umbilical es la unión electromecánica entre el control de superficie y la superestructura.
El control de superficie puede estar compuesto, bien por un PC portátil más un software de control de alto nivel (41-24), o por un "pocket" (control de bolsillo) (46-49). Además en ambos casos dispone de una pantalla TFT (41-25) y de una impresora de sublimación (41- 26). Finalmente, dispone también de las baterías además de un adaptador de corriente alterna/continua (AC/DC) (41-27).
Tipo: Resumen de patente/invención.
Solicitante: BIOVENG TECNOLOGIA SUBMARINA CB.
Nacionalidad solicitante: España.
Provincia: VALLADOLID.
Inventor/es: LOPEZ DE FRANCISCO,JOSE RAMON.
Fecha de Solicitud: 11 de Julio de 2001.
Fecha de Publicación: .
Fecha de Concesión: 10 de Octubre de 2002.
Clasificación Internacional de Patentes:
- B63G8/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B63 BUQUES U OTRAS EMBARCACIONES FLOTANTES; SUS EQUIPOS. › B63G INSTALACIONES OFENSIVAS Y DEFENSIVAS EN LOS BUQUES; COLOCACION DE MINAS; DRAGADO DE MINAS; SUBMARINOS; PORTAAVIONES (medios de ataque o de defensa en general, p. ej. torretas, F41H). › Embarcaciones sumergibles, p. ej. submarinos (cascos de submarinos B63B 3/13; cámaras de buceo unidas mecánicamente a una base, p. ej. mediante un cable B63C 11/34; artefactos automotores de buceo B63C 11/46; torpedos F42B 19/00).
Patentes similares o relacionadas:
SISTEMA DE AJUSTE DE MOTORES PARA VEHÍCULOS SUBMARINOS DE OPERACIÓN REMOTA PARA APROVECHAMIENTO DE EMPUJE DE MOTORES, del 16 de Julio de 2020, de UNIVERSIDAD SIMÓN BOLIVAR: La presente invención pertenece al campo de buques u otras embarcaciones flotantes, sus equipos y medios de localización o recuperación de objetos […]
Método para instalar un cable submarino, del 17 de Junio de 2020, de FUNDACION TECNALIA RESEARCH & INNOVATION: Un método para instalar un cable submarino con un aparato sumergible , comprendiendo el método: suministrar alimentación eléctrica […]
Un dispositivo de limpieza de superficie, del 17 de Junio de 2020, de HullWiper Limited: Un dispositivo para limpiar superficies sumergidas en agua, que comprende un miembro de disco soportado de manera giratoria por […]
Comunicaciones entre robots móviles de medio acuático, del 6 de Mayo de 2020, de SAUDI ARABIAN OIL COMPANY: Un sistema robótico de medio acuático, que comprende: - una estación de control ; - un robot submarino que tiene un cuerpo, una […]
Conjunto de batería para submarino, del 15 de Abril de 2020, de NAVAL GROUP: Conjunto de batería para submarino que incluye al menos un ensamblaje mecánico y eléctrico de ramas , incluyendo cada rama al menos un módulo […]
 Vehículo de inspección in-situ de transformador con un casco de jaula, del 25 de Marzo de 2020, de ABB Power Grids Switzerland AG: Un dispositivo de inspección para usar en un contenedor de fluido, que comprende:
al menos un dispositivo de empuje ;
al menos un dispositivo […]
Vehículo de inspección in-situ de transformador con un casco de jaula, del 25 de Marzo de 2020, de ABB Power Grids Switzerland AG: Un dispositivo de inspección para usar en un contenedor de fluido, que comprende:
al menos un dispositivo de empuje ;
al menos un dispositivo […]
Dispositivo de elevación para un submarino, del 8 de Enero de 2020, de ThyssenKrupp Marine Systems GmbH: Dispositivo de elevación para un submarino para transportar una carga útil a lo largo de una dirección de elevación, caracterizado porque […]
SISTEMA DE RECUPERACIÓN ROBÓTICA DE FONDO DE ESPACIO ACUÁTICO CON NANOPARTICULAS DE OXIGENO, del 12 de Diciembre de 2019, de MIRANDA AGÜERO, Manuel: La presente invención se relaciona con un conjunto de recuperación robótica de fondo de espacio acuático mediante nanopartículas de oxígeno, que comprende […]