DIGITALIZACION DE LA SUPERFICIE DE UN ARTICULO DE FORMA IRREGULAR, POR EJEMPLO UNA HORMA DE ZAPATO.
PARA DIGITALIZAR UNA HORMA U OTRO ARTICULO DE FORMA IRREGULAR,
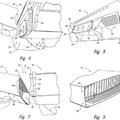
SE USA UN SISTEMA OPTICO QUE CONSTA DE DE UN DISPOSITIVO DE LASER (14) FIJADO EN UNA BASE DE MAQUINA (10) Y QUE DIRIGE UN RAYO DE LUZ A UNA HORMA SUJETADA PARA GIRAR SOBRE UN EJE, PERPENDICULAR AL CUAL SE DIRIGE EL RAYO DE LUZ. TAMBIEN SE FIJAN DOS CAMARAS (16) A LA BASE, UNA A CADA LADO DEL DISPOSITIVO DE LASER, Y CADA UNA CONSTA DE UN SISTEMA DE CELULAS PARA DETECTAR EL PUNTO DE INCIDENCIA DEL RAYO DE LUZ SOBRE LA SUPERFICIE DE LA HORMA. CUANDO SE HACE GIRAR LA HORMA, EL PUNTO DE INCIDENCIA VARIARA EN RELACION A UNA REFERENCIA, POR EJEMPLO EL EJE DE ROTACION, Y EL PUNTO DE MAXIMA INTENSIDAD DE ILUMINACION SOBRE EL SISTEMA DE CELULAS VARIARA A LO LARGO DEL SISTEMA CONSIGUIENTEMENTE. MEDIANTE UNA TECNICA DE CORRELACION, LA DISTANCIA DEL PUNTO DE INCIDENCIA DESDE LA REFERENCIA PUEDE DETERMINARSE DE ACUERDO CON EL PUNTO DE MAXIMA INTENSIDAD SOBRE EL SISTEMA. ASI, DIGITALIZANDO LA HORMA, ES NECESARIO SOLAMENTE GIRARLA Y TAMBIEN MOVERLA EN UNA DIRECCION A LO LARGO DE SU EXTENSION PARA QUE UN GRAN NUMERO DE POSICIONES DE PUNTO SE DETECTEN, ALMACENANDOSE ESTOS DESPUES COMO VALORES DE EJE DE COORDENADAS DIGITALIZADOS (R-THETA-Z). PUESTO QUE LA HORMA ES UN OBJETO DE FORMA IRREGULAR, EN ALGUNAS CIRCUNSTANCIAS ES NECESARIO PROPORCIONAR MAS POSICIONES DE PUNTOS DIGITALIZADOS QUE EN OTRAS AREAS. TAL AREA QUE REQUIERE MAYOR DEFINICION SON PUNTOS DE LIMITE DE LA PARTE INFERIOR DE LA HORMA, REGIONES DE ALTA CURVATURA Y TAMBIEN REGIONES DE "LARGO ARCO" (ESTO ES, REGIONES DONDE, A CAUSA DEL ANGULO DEL RAYO DE LUZ EN LA SUPERFICIE DE LA HORMA, LA DISTANCIA ENTRE PUNTOS CONSECUTIVOS DE INCIDENCIA ES GRANDE). ESTOS SE PROVEEN TODOS BIEN SEÑALANDO UNA OPERACION DE COMPLETACION SUBSIGUIENTE O BIEN VOLVIENDO A MEDIR SOBRE ANGULOS DE ROTACION REDUCIDOS DE LA HORMA.
Tipo: Resumen de patente/invención.
Solicitante: BRITISH UNITED SHOE MACHINERY LIMITED
USM ESPAÑA, S.L..
Nacionalidad solicitante: Reino Unido.
Dirección: PO BOX 88 ROSS WALK,BELGRAVE LEICESTER LE4 5BX.
Inventor/es: REEDMAN, DAVID CREYKE, WITTY, PETER MARTIN, MARSHALL, STEPHEN JOHN LAURENCE, SASSE, HUGH GRANVILLE.
Fecha de Publicación: .
Fecha Concesión Europea: 5 de Junio de 1996.
Clasificación Internacional de Patentes:
- G05B19/42 FISICA. › G05 CONTROL; REGULACION. › G05B SISTEMAS DE CONTROL O DE REGULACION EN GENERAL; ELEMENTOS FUNCIONALES DE TALES SISTEMAS; DISPOSITIVOS DE MONITORIZACION O ENSAYOS DE TALES SISTEMAS O ELEMENTOS (dispositivos de maniobra por presión de fluido o sistemas que funcionan por medio de fluidos en general F15B; dispositivos obturadores en sí F16K; caracterizados por particularidades mecánicas solamente G05G; elementos sensibles, ver las subclases apropiadas, p. ej. G12B, las subclases de G01, H01; elementos de corrección, ver las subclases apropiadas, p. ej. H02K). › G05B 19/00 Sistemas de control por programa (aplicaciones específicas, ver los lugares apropiados, p. ej. A47L 15/46; relojes que implican medios anejos o incorporados que permiten hacer funcionar un dispositivo cualquiera en un momento elegido de antemano o después de un intervalo de tiempo predeterminado G04C 23/00; marcado o lectura de soportes de registro con una información digital G06K; registro de información G11; interruptores horarios o de programa horario que se paran automáticamente cuando el programa se ha realizado H01H 43/00). › Sistemas de registro y de reproducción, es decir, en los que el programa es registrado a partir de un ciclo de operaciones, p. ej. el ciclo de operaciones está controlado a mano, y a continuación este registro es reproducido en la misma máquina.
Patentes similares o relacionadas:
 Métodos y sistemas de unión ala-fuselaje, del 29 de Enero de 2020, de THE BOEING COMPANY: Un metodo de union ala-fuselaje para una aeronave , comprendiendo el metodo:
(a) calcular un ajuste virtual entre un conjunto […]
Métodos y sistemas de unión ala-fuselaje, del 29 de Enero de 2020, de THE BOEING COMPANY: Un metodo de union ala-fuselaje para una aeronave , comprendiendo el metodo:
(a) calcular un ajuste virtual entre un conjunto […]
SISTEMA Y DISPOSITIVO DE ILUMINACIÓN POR LED, del 24 de Mayo de 2019, de BREBENEL, Nicolae: Un dispositivo, sistema, proceso y método de fabricación que utiliza al menos dos fuentes de iluminación por led para proporcionar módulos de componentes auxiliares. […]
Conformación de componentes utilizando ingeniería inversa, del 21 de Febrero de 2019, de THE BOEING COMPANY: Un método para conformar componentes, que comprende: medir un primer componente con un miembro de medición , estando el miembro de medición […]
Sistema y método para procesar una pieza de trabajo, del 8 de Febrero de 2019, de PEDDINGHAUS CORPORATION (100.0%): Un sistema para procesar una pieza de trabajo , comprendiendo dicho sistema : (A) una superficie de soporte para soportar una pieza […]
Aparato para y método de marcado de estructura precisa y localización de marcado de estructura asistida, del 14 de Febrero de 2018, de THE BOEING COMPANY: Un sistema de marcado por láser que comprende: una fuente de láser configurada para emitir un haz de láser; un conjunto de dirección configurado […]
Célula robotizada, instalación y método para eliminar rebabas de piezas, del 8 de Febrero de 2017, de Getting Robotika S.L: Una célula robotizada para eliminar rebabas o excesos de material en piezas de gran tamaño con al menos una superficie curva, que comprende una base y un […]
Sistema de visualización de dientes, del 5 de Octubre de 2016, de ALIGN TECHNOLOGY, INC.: Un método implementado en ordenador para presentar una vista para ortodoncia de los dientes de un paciente, comprendiendo el método: obtener un conjunto […]
 Control de la trayectoria de un robot que incluye un sistema y un método de vía de evacuación de emergencia, del 17 de Junio de 2013, de KUKA Laboratories GmbH: Proceso para controlar un recorrido de un robot (R) durante una evacuación de emergencia desde un recorridoprincipal , comprendiendo el proceso: proporcionar […]
Control de la trayectoria de un robot que incluye un sistema y un método de vía de evacuación de emergencia, del 17 de Junio de 2013, de KUKA Laboratories GmbH: Proceso para controlar un recorrido de un robot (R) durante una evacuación de emergencia desde un recorridoprincipal , comprendiendo el proceso: proporcionar […]