AUTOMATA DESTINDO A MANDAR A ACCIONADORES EN FUNCION DEL ESTADO DE LOS CAPTADORES.
SE DESCRIBE UN AUTOMATA DESTINADO A MANDAR ACCIONADORES EN FUNCION DEL ESTADO DE LOS CAPTADORES C,
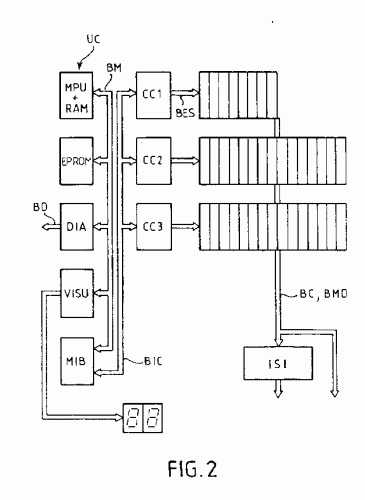
DEL TIPO QUE COMPRENDE UNA UNIDAD (MPU B RAM - ERPOM-DIA) Y FICHAS DE ENTRADAS/SALIDAS, COMPRENDE UN PRIMER BUS DE ENLACE BM ASOCIADO A LA UNIDAD CENTRAL, UN SEGUNDO BUS DE ENLACE BIC QUE UNE A ESTE PRIMER BUS, A TRAVES DE UN MODULO DE INTERFACE DE BUS MIB, AL MENOS UNA FICHA DE CONTROL CC1, CC2 O CC3, Y AL MENOS UN TERCER BUS DE ENLACE BES QUE UNE UN GRUPO DE FICHAS DE ENTRADAS/SALIDAS A ESTA FICHA DE CONTROL. EL INVENTO ES APLICABLE A LA AUTOMATIZACION DE MAQUINAS MINERAS PRINCIPALMENTE.
Tipo: Resumen de patente/invención.
Solicitante: CHARBONNAGES DE FRANCE.
Nacionalidad solicitante: Francia.
Dirección: 9, AVENUE PERCIER, 75008 PARIS.
Inventor/es: LOUAPRE, JEAN-CLEMENT, DUBAIL, DANIEL.
Fecha de Solicitud: 1 de Agosto de 1986.
Fecha de Publicación: .
Fecha de Concesión: 12 de Febrero de 1988.
Clasificación Internacional de Patentes:
- B25J9/18 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 9/00 Manipuladores de control programado. › eléctricos.
Patentes similares o relacionadas:
Método de control de una máquina con actuación redundante paralela, dispositivo de control asociado y máquina, del 1 de Febrero de 2017, de CENTRE NATIONAL DE LA RECHERCHE SCIENTIFIQUE (C.N.R.S.): Un método para controlar una máquina que comprende: - un marco , - un elemento móvil accionado en relación con dicho marco […]
 Procedimiento para calificar la precisión de un sistema con control numérico, del 4 de Noviembre de 2013, de THE BOEING COMPANY: Un procedimiento de calificación de la precisión de un sistema de mecanizado que tiene una máquina multiejecon control numérico y un accesorio […]
Procedimiento para calificar la precisión de un sistema con control numérico, del 4 de Noviembre de 2013, de THE BOEING COMPANY: Un procedimiento de calificación de la precisión de un sistema de mecanizado que tiene una máquina multiejecon control numérico y un accesorio […]
APARATO PARA LA REALIZACION DE FUNCIONES REPETITIVAS PREPROGRAMADAS, CON MOVILIDAD AUTOMATIZADA Y ACCESO A INTERNET, del 1 de Enero de 2005, de GIL MIQUEL,ANTONI: Aparato para la realización de funciones repetitivas preprogramadas, con movilidad automatizada y acceso a Internet. El aparato comprende un […]
PROCEDIMIENTO DE PILOTAJE DE UN BRAZO DE ROBOT, QUE DEFINE TRAYECTOS DE SUSTITUCION, del 1 de Abril de 1996, de COMMISSARIAT A L'ENERGIE ATOMIQUE: PROCESO DE CONTROL DE UN BRAZO DE ROBOT QUE COMPRENDE UN CIERTO NUMERO DE ARTICULACIONES (A A F) SUSCEPTIBLES DE SERVIR DE TOPE. SE DEFINEN AUTOMATICAMENTE […]
ENSAMBLAJE DE PARTES CON GUIA POR CAPACITANCIA, del 16 de Febrero de 1995, de AT&T CORP.: METODOS Y APARATOS PARA EL ENSAMBLAJE DE PARTES UTILIZANDO SENSIBILIDAD CAPACITIVA, TANTO PARA CONTROLAR LA FASE DE CIERRE (HOMING) DEL PROCESO DE ENSAMBLAJE […]
MESA PARA EL POSICIONADO DE ELEMENTOS SOBRE UN SOPORTE SEGUN UN DOCUMENTO DE REFERENCIA., del 1 de Septiembre de 1990, de BOSBOT S.A.: MESA PARA EL POSICIONADO DE ELEMENTOS SOBRE UN SOPORTE SEGUN UN DOCUMENTO DE REFERENCIA Y MAS PARTICULARMENTE MESA QUE PERMITE DISPONER EXACTAMENTE CLICHES […]
SISTEMA DE CONTROL PARA UN APARATO MANIPULADOR, del 1 de Junio de 1986, de UNIMATION, INC.: MODIFICACIONES EN UN SISTEMA DE CONTROL PARA UN MANIPULADOR PROGRAMABLE. CONSISTENTES EN: ELEMENTOS PARA GENERAR UNA SEÑAL DE REALIMENTACION DE VELOCIDAD CORRESPONDIENTE […]
 ROBOTS CON LIMITACION ACTIVA, del 16 de Octubre de 2008, de THE ACROBOT COMPANY LIMITED: Un método de controlar un robot con limitación o restricción activa, que comprende las etapas de: proporcionar un robot con limitación o restricción activa que incluye […]
ROBOTS CON LIMITACION ACTIVA, del 16 de Octubre de 2008, de THE ACROBOT COMPANY LIMITED: Un método de controlar un robot con limitación o restricción activa, que comprende las etapas de: proporcionar un robot con limitación o restricción activa que incluye […]