CIP-2021 : B25J 5/00 : Manipuladores montados sobre ruedas o sobre soportes móviles (B25J 1/00 tiene prioridad;
manipuladores de control programado B25J 9/00).
CIP-2021 › B › B25 › B25J › B25J 5/00[m] › Manipuladores montados sobre ruedas o sobre soportes móviles (B25J 1/00 tiene prioridad; manipuladores de control programado B25J 9/00).
Notas[t] desde B21 hasta B32: CONFORMACION
B25J 5/02 · que se desplazan sobre un camino-guía.
B25J 5/04 · · en los que el camino-guía es también móvil, p. ej. del tipo puente rodante.
B25J 5/06 · Manipuladores combinados con una cabina de control para el operador.
CIP2021: Invenciones publicadas en esta sección.
Sensores de pista para detectar la posición del vehículo con respecto a las pistas.
(15/07/2020) Un método para rastrear la posición de un vehículo operado remotamente siguiendo una ruta establecida en relación con las pistas establecidas en una estructura de marco que forma una cuadrícula de almacenamiento, el vehículo tiene un primero y segundo juego de ruedas conectadas a las unidades para mover el vehículo en las correspondientes direcciones x- y y- en la cuadrícula, que comprende:
- recibir información de un número total de cruces de pista para pasar entre las posiciones de inicio y parada en las direcciones x- y y- de acuerdo con la ruta establecida;
- dirigir los sensores unidos al vehículo en las pistas a lo largo de la ruta del vehículo, caracterizados porque al menos un primer sensor está conectado a un soporte de rueda en un lado del vehículo,…
SISTEMA Y PROCEDIMIENTO PARA EL RECAMBIO DE REVESTIMIENTOS, CUYA CONFIGURACIÓN PERMITE RETIRAR E INTRODUCIR, EN FORMA AUTOMATIZADA, REVESTIMIENTOS DE UN MOLINO UTILIZADO PARA LA MOLIENDA DE MINERAL.
(02/07/2020). Solicitante/s: MI ROBOTIC SOLUTIONS S.A. Inventor/es: SALAMANCA POBLETE,Hugo, BAEZA RAMIREZ,Luis.
Un sistema y procedimiento para el recambio de revestimientos de un molino, cuya configuración permita la manipulación automatizada y robótica de revestimientos de molinos para la molienda de minerales en procesos de conminución, cuya configuración y operación permita mejorar la tarea de manipulación al poseer un mayor grado de libertad y/o flexibilidad en sus movimientos, proporcionando al procedimiento un mayor grado de certeza y eficacia, por lo tanto optimizando el tiempo de detención del molino por mantenimiento, así como evitar los riesgos a los que se pueda ver sometido el personal de mantenimiento, el sistema comprende al menos una estructura de soporte, al menos un sistema de alimentación y desplazamiento de revestimientos, al menos un sistema manipulador robótico de los revestimientos, al menos una herramienta de manipulación de revestimientos, al menos un sistema de visión artificial y al menos un sistema de control.
Procedimiento de tratamiento de una superficie, y autómata correspondiente.
(20/05/2020) Procedimiento de tratamiento de una superficie a tratar, por medio de un autómata que consta de:
- una base configurada para desplazarse por un suelo,
- una plataforma montada sobre la base y configurada para desplazarse, al menos en parte, perpendicularmente a la base , por ejemplo, verticalmente, y
- un medio de tratamiento , por ejemplo, un brazo, montado sobre la plataforma y que consta de un extremo móvil configurado para tratar una superficie dada,
procedimiento en donde: caracterizado por que
a) se divide la superficie a tratar en subdivisiones de superficie inferior o igual a la superficie dada, siendo las subdivisiones obtenidas por distribución de la superficie a tratar de acuerdo con una cuadrícula regular cuyas líneas corresponden a los desplazamientos de la plataforma y de la base ,
a') se…
Manipulador de alimentos en un almacén.
(13/05/2020) Un manipulador de alimentos (1a) en un almacén ; comprendiendo dicho almacén una pluralidad de estaciones de almacenamiento (1b) en las que al menos una está asociada con uno de dichos alimentos (1a); estando dicho manipulador caracterizado porque comprende
- una estación de análisis de dicho alimento (1a);
- un miembro de recogida de dicho alimento (1a) de dicha estación de almacenamiento (1b) adecuado para colocar dicho alimento (1a) en dicha estación de análisis ;
- un transportador de dicho manipulador adecuado para colocar dicho miembro de recogida , dicha estación de análisis y dicho dispositivo de inspección en correspondencia…
Mecanismo de despliegue para normalización pasiva de un instrumento con relación a la superficie de una pieza de trabajo.
(01/01/2020) Un aparato que se configura para transportar un instrumento y desplegar opcionalmente el instrumento en relación con una superficie que comprende:
- una primera conexión que se configura para acoplarse operativamente al instrumento y se configura para mover el instrumento en una primera dirección y de acuerdo con una primera trayectoria en relación con la superficie ; y
- una segunda conexión que se configura para acoplarse operativamente al instrumento y se configura para mover el instrumento de acuerdo con una segunda dirección para hacer que el instrumento se vuelva al menos sustancialmente normal a la superficie tras el contacto entre al menos una porción del aparato y la superficie ,
…
Fabricación de producción ultraflexible.
(13/11/2019) Un sistema de fabricacion que comprende:
una pluralidad de celdas de trabajo , donde cada una de dichas celdas realiza uno o mas procesos de fabricacion en una de una pluralidad de piezas de trabajo asociadas;
un dispositivo de control (12a, 14a, 16a, 18a) incluido en cada celda de trabajo de la pluralidad de celdas de trabajo y configurado para determinar si un trabajo realizado en una celda de trabajo correspondiente se completa correctamente,
una o mas unidades de transporte moviles (20a, 20b), MTU, para entregar contenedores transportables que contienen dichas piezas de trabajo hacia y desde dichas celdas de trabajo, dicha una o mas unidades de transporte moviles que entregan dichos contenedores a dichas celdas…
Aparato de distribución de carga de rueda magnética.
(21/08/2019) Un aparato para limpiar el fondo de un barco en el que un aparato de distribución de carga comprende:
una pluralidad de ruedas magnéticas para adherirse al fondo del barco;
caracterizado porque el aparato de distribución de carga comprende, además
una pluralidad de partes de los cilindros , cada una de la pluralidad de partes de los cilindros que incluye - un cuerpo del cilindro ;
- un pistón proporcionado de forma elevable en el cuerpo del cilindro , que divide el cuerpo del cilindro en una porción de espacio superior y una porción de espacio inferior cuyos interiores no se comunican entre sí;
- un eje del pistón que incluye un lado conectado al pistón …
Cortadora de alto rendimiento con pinza adaptada por unión de materiales.
(07/08/2019). Solicitante/s: GEA Food Solutions Germany GmbH . Inventor/es: KELLER, MARKUS.
Cortadora de alto rendimiento que presenta una cuchilla que corta lonchas de producto alimenticio de uno de los extremos de un producto alimenticio , y una pinza , que de forma reversible entra en contacto con el otro extremo del producto alimenticio y lo fija y/o guía durante el corte de las últimas lonchas del producto alimenticio, caracterizada por que se prevén medios apropiados para generar una unión de materiales entre la pinza y el extremo del producto alimenticio.
PDF original: ES-2750665_T3.pdf
Movimiento restrictivo de un robot móvil.
(24/07/2019). Ver ilustración. Solicitante/s: IROBOT CORPORATION. Inventor/es: WILLIAMS,MARCUS, LU,PING-HONG, JOHNSON,JOSEPH M.
Un robot que comprende:
un cuerpo que se puede mover en relación con una superficie ;
uno o más dispositivos de medición dentro del cuerpo para emitir información basándose en una orientación del cuerpo en una ubicación inicial en la superficie ; y
un controlador dentro del cuerpo para determinar la orientación del cuerpo basándose en la información, y
caracterizado por que el controlador está configurado además para restringir el movimiento del cuerpo a un área impidiendo el movimiento del cuerpo más allá de una barrera virtual que define un límite que el robot no puede cruzar que es creado basándose en la orientación del cuerpo y la ubicación inicial, y
el controlador está configurado además para almacenar la barrera virtual que ha de ser utilizada subsiguientemente para restringir el movimiento del robot.
PDF original: ES-2746498_T3.pdf
Robot humanoide con ruedas omnidireccionales basado en un controlador de posición y velocidad lineal predictivo.
(03/07/2019) Un robot humanoide con un cuerpo unido a una base de suelo móvil omnidireccional equipado con:
- un sensor de posición de cuerpo, un sensor de posición de base y un sensor de velocidad angular para proporcionar medidas,
- accionadores que comprenden motores de articulaciones y al menos 3 ruedas ubicadas en la base móvil omnidireccional, con al menos una rueda omnidireccional,
- extractores para convertir medidas detectadas,
- un supervisor para calcular comandos de posición, velocidad y aceleración a partir de los datos extraídos,
- medios para convertir comandos en instrucciones para los accionadores,
caracterizado porque el supervisor comprende:
- un controlador de estado de no inclinación que usa un modelo de robot en el que…
Sistema de inspección y proceso de inspección utilizando un vehículo de inspección magnético.
(12/06/2019) Vehículo de inspección configurado para inspeccionar generadores de vapor, comprendiendo el vehículo de inspección:
un bastidor delantero que comprende dos ruedas magnéticas accionadas independientemente ;
un bastidor trasero que comprende dos ruedas magnéticas accionadas independientemente ;
un elemento de conexión que conecta de manera flexible el bastidor delantero al bastidor trasero para permitir un movimiento relativo entre el bastidor delantero y el bastidor trasero a lo largo de por lo menos un eje, definiendo colectivamente el elemento de conexión , el bastidor delantero, y el bastidor trasero una zona de recepción;
una cámara de navegación dispuesta…
Cobertura multimodal para un robot autónomo.
(16/05/2019) Un robot móvil , que comprende:
medios de desplazamiento del robot sobre una superficie;
un sensor de detección de obstáculos ; y
un sistema de control conectado operativamente a dicho sensor de detección de obstáculos y a dichos medios de desplazamiento;
en el que dicho sistema de control tiene un modo de seguimiento de obstáculos, mediante el cual dicho robot se desplaza junto a un obstáculo detectado, y un modo de cobertura de habitación;
dicho sistema de control está configurado para hacer funcionar el robot en uno o varios comportamientos que incluyen un comportamiento de cobertura en el que el sistema de control alterna cíclicamente entre…
Disposición articulada con al menos un eje accionado.
(26/04/2019) Disposición articulada con al menos un eje accionado, en particular para activar un movimiento de un componente de un robot,
- en donde al menos un primer elemento base aloja un primer elemento de rotación y el primer elemento de rotación puede rotar alrededor de un primer eje de rotación ,
- en donde el primer elemento de rotación aloja un segundo eje de rotación separado del primer eje de rotación , alrededor del cual un segundo elemento de rotación puede pivotar en el primer elemento de rotación ,
- en donde el segundo elemento de rotación aloja un tercer eje de rotación separado del segundo eje de rotación , alrededor del cual un segundo elemento base …
PLATAFORMA OMNIDIRECCIONAL Y TRANSPORTADOR OMNIDIRECCIONAL.
(31/01/2019). Solicitante/s: UNIVERSITAT POLITECNICA DE CATALUNYA. Inventor/es: CANUTO GIL,JUAN JOSÉ, DOMÈNECH MESTRES,Carles.
Plataforma omnidireccional que comprende un primer módulo con al menos de una primera rueda motriz conectada a un primer árbol horizontal accionada mediante un primer actuador y una segunda rueda motriz conectada a un segundo árbol accionada mediante un segundo actuador ; un segundo módulo conectado a dicho primer módulo mediante un tercer árbol vertical accionado mediante un tercer actuador ; un dispositivo de control conectado al primer, segundo y tercer actuadores , en donde el segundo módulo está soportada sobre el primer módulo ; el primer módulo incluye además un elemento de rodadura de giro libre. En una segunda realización la plataforma se sitúa boca abajo quedando sus ruedas accesibles desde un plano de transporte, formando un transportador omnidireccional estático para la transferencia omnidireccional de paquetes.
PLATAFORMA OMNIDIRECCIONAL.
(31/01/2019). Solicitante/s: UNIVERSITAT POLITECNICA DE CATALUNYA. Inventor/es: CANUTO GIL,JUAN JOSÉ, DOMÈNECH MESTRES,Carles.
Plataforma que comprende un primer módulo con una primera rueda motriz y una segunda rueda motriz enfrentadas y coaxiales; un segundo módulo compuesto por un bastidor principal (2a) y por un bastidor auxiliar (2b) articulados entre sí mediante una unión articulada , estando ei bastidor principal (2a) soportado sobre el primer módulo mediante un tercer árbol vertical y sobre dos elementos de rodadura de giro libre y auto-orientabies, y estando el bastidor auxiliar (2b) soportado en la unión articulada y sobre dos elementos de rodadura de giro libre y auto-orientables; en donde la unión articulada está dotada de un grado de libertad o de dos grados de libertad, y la plataforma incluye al menos un dispositivo de suspensión.
Manipulador remoto para manipular múltiples sub-conductores energizados en un haz monofásico.
(31/01/2018) Un manipulador remoto para separar múltiples sub-conductores en un haz monofásico energizado desde una distancia (d1) de separación inicial a una distancia (d3) de separación optimizada, en el que los múltiples subconductores son separados por un enlace rígido o una placa de yugo, en el que el manipulador comprende:
un miembro de soporte rígido que puede ser montado en el extremo de una pluma ,
al menos unos accionadores (40a, 40b) primero y segundo accionables de manera independiente montados en dicho miembro de soporte,
un aislador (36a, 36b) montado en cada accionador de dichos al menos unos accionadores primero y segundo, en el que cada aislador tiene un eje longitudinal y una trayectoria lineal correspondiente que se extiende de manera colineal desde el eje longitudinal, y en el que los aisladores están montados de manera que…
Método y sistema de cobertura multicódigo para un robot autónomo.
(10/01/2018) Un robot móvil que comprende:
(a) medios para mover el robot sobre una superficie;
(b) un sensor de detección de obstáculos , un sensor de seguimiento de obstáculos , un detector de precipicios y un sensor de caída de rueda que es capaz de detectar si una o más ruedas no están soportadas por la superficie;
(c) y un sistema de control conectado con capacidad de funcionamiento a dicho sensor de detección de obstáculos y dichos medios de movimiento;
(d) configurado dicho sistema de control para hacer funcionar el robot en varios modos, comprendiendo dichos varios modos:
un modo de seguimiento de obstáculos mediante el cual dicho robot se desplaza adyacente a un obstáculo, en donde el sensor de seguimiento de…
VEHÍCULO TERRESTRE NO TRIPULADO PARA LA DETECCIÓN Y GEO-LOCALIZACIÓN DE ARTEFACTOS SITUADOS EN SUPERFICIE O ENTERRADOS.
(05/12/2017). Solicitante/s: Ebotlution Systems SL. Inventor/es: VILA ROUCO,Jesús María, RABANEDA TRAVÉ,Carlos.
Vehículo terrestre no tripulado para la detección y geo-localización de artefactos situados en superficie o enterrados.
Vehículo terrestre para la detección y geo-localización de artefactos situados en superficie o enterrados, como son minas o restos de explosivos, formado por un conjunto de elementos o módulos fabricados en materiales no ferromagnéticos, preferiblemente plástico y/o caucho. El vehículo comprende una estructura bastidor principal sobre la que se acoplan una caja trasera , una delantera y un conjunto de rodadura que comprende unas ruedas y dos bandas de rodadura . La caja trasera da soporte a un conjunto de brazos basculantes y un motor para desvuelco, desempanzado y donde además se alojan unos componentes de tele-detección, baterías, un equipo electrónico de control y comunicaciones y diferentes sensores; la caja delantera está equipada con sensores de escaneado y detección.
PDF original: ES-2645453_A1.pdf
PDF original: ES-2645453_B1.pdf
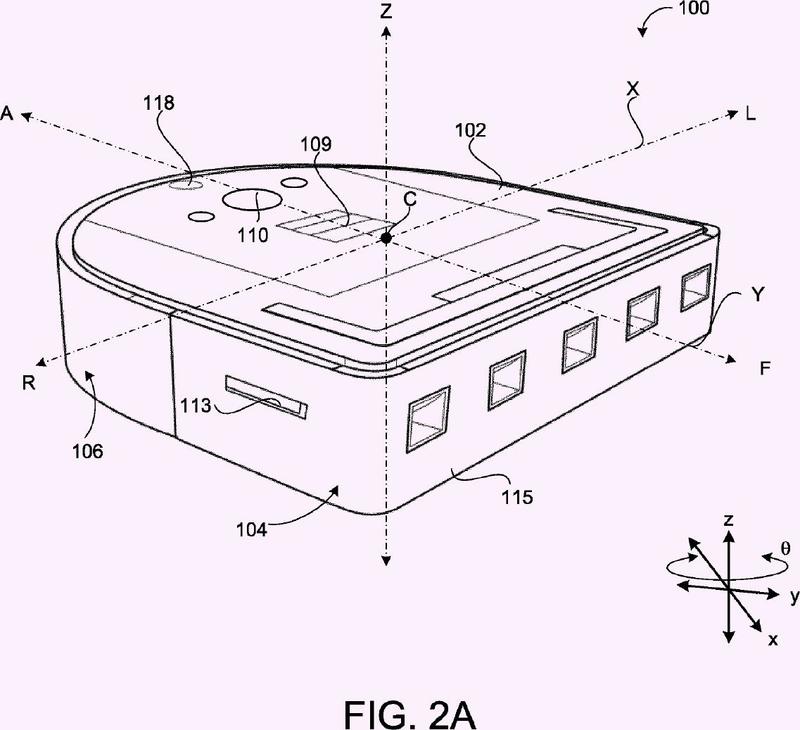
Detección de proximidad en robots móviles.
(01/11/2017) Un robot autónomo que comprende:
un cuerpo del robot que define una dirección motriz de avance (F);
un sistema motriz que soporta el cuerpo del robot y configurado para maniobrar el robot sobre una superficie (10, 10a, 10b);
al menos un detector de proximidad (520, 520a, 520b, 520c, 520d, 520e, 520f) que comprende:
un primer componente que tiene un primer campo de visión ;
un segundo componente (522a, 524a) que tiene un segundo campo de visión (523a, 525a), intersectando el primer campo de visión el segundo campo de visión (523a, 525a) para formar un primer volumen de intersección (V1);
…
Equipo y método para trabajo mecánico.
(04/10/2017). Solicitante/s: BISIACH & CARRU'S.P.A.. Inventor/es: BISIACH, BRUNO.
Equipo para trabajo mecánico provisto de una unidad de trabajo móvil (1; 1') que a su vez comprende:
- un manipulador mecánico ;
- un cabezal de trabajo montado en el manipulador mecánico ;
- un carro de manipulación que soporta el manipulador mecánico , en el que el carro de manipulación está dispuesto para transportar el manipulador mecánico a una pluralidad de estaciones de trabajo (A, B) caracterizado porque la unidad de trabajo comprende una guía deslizante (11A, 11B, 12) y en donde el manipulador mecánico comprende uno o más pistones deslizantes montados de forma deslizante en la guía (11A, 11B, 12) y dispuestos para mover el cabezal de trabajo por medio de su movimiento deslizante.
PDF original: ES-2654988_T3.pdf
Dispositivo para recorrer un objeto.
(06/09/2017) Un dispositivo para permitir que se lleve a cabo el trabajo en o alrededor de un objeto , incluyendo el dispositivo:
una primera disposición de agarre que está acoplada de forma pivotable o giratoria a una segunda disposición de agarre por medio de un brazo , comprendiendo la primera y segunda disposiciones de agarre cada una un par de patas (20a, 20b) de enganche conectadas de forma pivotable a un cuerpo y medios (24, 24b) de desplazamiento de pata de enganche respectivos montados en las patas (20a, 20b) de enganche, siendo asignable cada medio (24a, 24b) de desplazamiento de pata de enganche para mover la correspondiente pata (20a, 20b) de enganche entre una posición cerrada y una posición abierta para asegurar de forma respectiva la disposición de agarre y liberar la disposición de agarre del objeto ; y
un controlador…
ROBOT INDUSTRIAL MULTI-EJES.
(07/08/2017). Solicitante/s: ORTEGA MUÑOZ, David. Inventor/es: ORTEGA MUÑOZ,DAVID.
Robot industrial multi-ejes que comprende una cadena de elementos unidos entre sí por medio de unas articulaciones móviles accionadas y movidas por al menos un dispositivo de control, la cadena de elementos se extiende desde una estructura base hasta una herramienta requerida en una estación de trabajo, donde, la cadena de elementos comprende un segmento de brazo posicionador que incluye a la estructura base, y al menos un segmento de brazo manipulador que incluye en su extremo libre a la herramienta, el segmento de brazo posicionador aproxima al segmento de brazo manipulador a la estación de trabajo.
PDF original: ES-2629037_A1.pdf
PDF original: ES-2629037_B1.pdf
Base para robot educativo.
(19/07/2017) 1. Base para robot educativo, caracterizado porque dicha base comprende:
- unos medios de apoyo que permiten que la base se desplace;
- unos medios de detección del entorno para evitar que la base choque o se caiga durante su desplazamiento;
- un medio de soporte para un Smartphone , donde el medio de soporte está configurado para hacer girar el Smartphone alrededor de un eje horizontal y alrededor de un eje vertical;
- un medio de procesamiento conectado a los medios de apoyo, los medios de detección del entorno, y el medio de soporte; y
- un medio de comunicación entre el medio de procesamiento y el Smartphone , de modo que el Smartphone puede comunicarse con…
Dispositivo para salvar un obstáculo durante el desplazamiento.
(01/02/2017). Solicitante/s: VORWERK & CO. INTERHOLDING GMBH. Inventor/es: WINDORFER,Harald.
Aparato de limpieza de suelos de desplazamiento automático con un dispositivo para salvar un obstáculo durante el desplazamiento, presentando el dispositivo una rueda de desplazamiento accionada , caracterizado por que en la rueda de desplazamiento se aloja de forma excéntricamente pivotante un elemento de elevación que sobresale con una superficie final anterior de una superficie de rodadura de la rueda de desplazamiento en dirección de desplazamiento (r), previéndose un contra-apoyo fijado en la carcasa.
PDF original: ES-2616303_T3.pdf
Procedimiento y sistema de cobertura plurimodal para un robot autónomo.
(10/08/2016) Un robot móvil, que comprende:
medios de desplazamiento del robot sobre una superficie;
un sensor de detección de obstáculos ; y
un sistema de control conectado operativamente a dicho sensor de detección de obstáculos y a dichos medios de desplazamiento;
teniendo dicho sistema de control un comportamiento de cobertura, en el que el sistema de control alterna en un ciclo entre un modo de seguimiento de obstáculos, en el que el robot se desplaza junto a un obstáculo detectado, y un modo de cobertura de habitación, en el que el robot se desplaza sustancialmente en una dirección alejándose del obstáculo;
caracterizado por que el sistema de control está configurado de modo que haga funcionar el robot en una pluralidad de comportamientos que incluyen…
Aparato para posicionamiento automatizado de sonda de ensayo de corrientes parásitas.
(10/08/2016) Un aparato para inspección y ensayos automatizados de una placa tubular en el que la placa tubular tiene una pluralidad de aberturas de tubo dispuestas sobre un plano de la placa tubular, comprendiendo el aparato:
un conjunto de núcleo que comprende:
una parte del cuerpo deslizante que contiene una cápsula de agarrador giratoria con tres agarradores de tubo;
un acoplamiento de cabezal de herramientas montado articuladamente a dicho conjunto de núcleo; y
accionadores de carcasa exterior; y caracterizado por:
una parte de carcasa con carcasas exteriores izquierda y derecha;
comprendiendo cada carcasa…
(10/08/2016) Un robot móvil , que comprende:
medios de desplazamiento del robot sobre una superficie;
un sensor de detección de obstáculos ; y
un sistema de control conectado operativamente a dicho sensor de detección de obstáculos y a dichos medios de desplazamiento; en el que
dicho sistema de control tiene un modo de seguimiento de obstáculos, mediante el cual dicho robot se desplaza junto a un obstáculo detectado, y un modo de cobertura de habitación, mediante el cual el robot se desplaza sustancialmente en una dirección alejándose del obstáculo;
dicho sistema de control está configurado para hacer funcionar el robot en uno o varios comportamientos que incluyen…
BRAZO ARTICULADO TELESCÓPICO ROBOTIZADO.
(26/05/2016) Brazo articulado telescópico robotizado, de accionamiento electrohidráulico remoto pudiendo ser instalado en vehículos operacionales para poder llevar a cabo tareas de reconocimiento, detección e identificación de cualquier tipo de artefacto peligroso, cuyo brazo articulado telescópico en sí queda montado en una torreta solidaria a un soporte base de acople rápido y cuyo soporte base comprende una central hidráulica, un motor de una bomba hidráulica y una electrónica de control, de forma que el brazo se define por un primer segmento articulado accionado por un primer cilindro hidráulico asociado al soporte base; un segundo segmento articulado telescópico accionado por un segundo cilindro hidráulico asociado al primer segmento articulado; un tercer segmento articulado telescópico accionado por un tercer cilindro…
Dispositivo de inspección de manipulación.
(18/05/2016) Un dispositivo de inspección de manipulación comprendiendo un soporte principal, al cual se conecta un mástil telescópico, mientras que el soporte principal está adaptado para conexión repetida con una vasija a presión de reactor, en el que el soporte principal comprende una parte central y al menos tres patas de soporte conectables a él, estando dispuestas las patas de soporte sustancialmente por igual alrededor de la circunferencia de la parte central y adaptadas para conexión repetible con una vasija a presión de reactor, caracterizado por que la parte central del soporte principal está provista con una placa giratoria que tiene un orificio en su centro así como con una unidad para girar el mástil telescópico,…
Robot para manipulación de artefactos sospechosos.
(17/09/2015) Robot para manipulación de artefactos sospechosos, siendo del tipo robots provistos de unos medios móviles de tracción, de especial aplicación, dadas sus reducidas dimensiones, para acceder a espacios reducidos, tales como el interior de autobuses, trenes y aviones, pudiendo inspeccionar, manipular y desactivar artefactos explosivos, incorporando en la superficie superior del cuerpo de tanqueta una base de giro con un sensor de carga y disponiendo de cuatro medios móviles de tracción, flippers, dos a cada lado del cuerpo de tanqueta, accionados por respectivos motores con correspondientes encoders, controlando la posición, velocidad y par, de forma independiente, y con una correa de tracción para cada medio móvil, accionadas por una pareja de motores para su transmisión dos a dos, y, unos sensores inerciales, así como unos sensores…
Vehículo robotizado telecomandado.
(10/07/2015) Vehículo robotizado telecomandado, siendo del tipo de los que disponen de unos medios de rodadura y un brazo articulado rematado en una pinza y que es tele-comandado para llevar a cabo diferentes operaciones de riesgo, por medio de una maleta de control, de forma que el vehículo comprende: dos juegos de ruedas, uno a cada lateral, accionado cada uno por correspondientes motores; dos juegos de oruga, uno a cada lado por el interior de los juegos de ruedas; un primer brazo articulado montado sobre una torreta giratoria 360º; un segundo brazo articulado y giratorio respecto de un eje vertical de montaje y unos medios de doble articulación de montaje de la torreta…
ROBOT CON SOPORTE PORTA HERRAMIENTAS.
(16/06/2015) Robot con soporte portaherramientas, siendo del tipo de robots utilizados en la manipulación de artefactos sospechosos, los cuales disponen de un brazo articulado, rematado en una pinza, a través de la cual manipulan los artefactos, de forma que el extremo libre del brazo articulado o la pinza incorporan una cámara de visión, y el cuerpo del robot monta un soporte porta herramientas, definido por una estructura de forma general en "U" que por sus alas se ancla al cuerpo del robot y en su alma presenta, al menos, dos habitáculos de alojamiento de respectivas herramientas asociadas a un conjunto definido por: la herramienta en sí; una batería de alimentación…
{kind=link}