Suspensión de vehículos de motor.
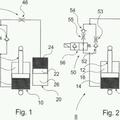
Suspensión de rueda para vehículos motorizados, con un soporte de rueda (3) que presenta un elementoportante (17) que soporta de manera giratoria una rueda de vehículo (1) y un elemento portante (19) en el lado deeje,
entre los cuales se encuentra conectado un actuador (21) con cuya activación el elemento portante (17) en ellado de rueda es pivotante en un ángulo de pivotado (φ) respecto del elemento portante (19) en el lado de eje para elajuste de un ángulo de convergencia y/o de inclinación vertical (δ, ω), caracterizada porque el actuador (21) presentauna pieza giratoria (23) en el lado de rueda y una pieza giratoria (25) en el lado de eje torsionables entre sí sobresus ejes de rotación (27, 28), y la pieza giratoria (23) en el lado de rueda es desviable en el ángulo de pivotado (φ)respecto de la pieza giratoria (25) en el lado de eje al torsionar las dos piezas giratorias (23, 25), estando el eje derotación (27) de la pieza giratoria (23) en el lado de rueda inclinada en un ángulo de inclinación (γ) respecto del ejede rotación (28) de la pieza giratoria (25) en el lado de eje, y ambas piezas giratorias (23, 25) están montadas demanera giratoria a los elementos portantes (17, 19) respectivos por medio de pivotes (30) y/o rodamientos.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2008/008040.
Solicitante: AUDI AG.
Nacionalidad solicitante: Alemania.
Dirección: 85045 INGOLSTADT ALEMANIA.
Inventor/es: SCHMID, WOLFGANG, MULLER, HUGO, MICHEL,WILFRIED, Kossira,Christoph, Meitinger,Karl-Heinz, KUNSCH,PETER.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B60G17/015 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60G SUSPENSION DE VEHICULOS (vehículos de colchón de aire B60V; montajes entre el chasis y el cuerpo del vehículo B62D 24/00). › B60G 17/00 Suspensiones elásticas que permiten ajustar las características de los muelles o de los amortiguadores de vibraciones, regular la distancia entre la superficie portante y la parte suspendida del vehículo o bloquear la suspensión durante la utilización para adaptarse a las condiciones variables del vehículo o del terreno, p. ej. en función de la velocidad o de la carga. › comportando los medios de reglaje elementos eléctricos o electrónicos (B60G 17/005 tienen prioridad).
- B60G7/00 B60G […] › Brazos de suspensión articulados; Sus accesorios (dispositivos para mantener prácticamente constante la inclinación de la rueda durante el movimiento de la suspensión B60G 3/26).
- B62D17/00 B […] › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62D VEHICULOS DE MOTOR; REMOLQUES (dirección o guiado de máquinas o instrumentos agrícolas según un recorrido determinado A01B 69/00; ruedas, ruedecillas pivotantes, mejora de la adherencia de ruedas B60B; neumáticos para vehículos, inflado de neumáticos, cambio o reparación de neumáticos B60C; conexiones entre vehículos de un mismo tren o de un conjunto similar B60D; vehículos raíl-carretera, vehículos anfibios o transformables B60F; disposiciones de suspensión B60G; calefacción, refrigeración, ventilación u otros dispositivos de tratamiento del aire B60H; ventanas, parabrisas, techos descapotables, puertas o dispositivos similares, cubiertas de protección para vehículos fuera de servicio B60J; disposiciones de conjuntos de propulsión, accionamientos auxiliares, transmisiones, disposición de instrumentos o tableros de a bordo B60K; equipo eléctrico o propulsión de vehículos de tracción eléctrica B60L; alimentación de energía eléctrica para vehículos de tracción eléctrica B60M; disposiciones para pasajeros no previstas en otro lugar B60N; vehículos adaptados al transporte de cargas o para llevar cargas u objetos especiales B60P; adaptación de los dispositivos de señalización o de iluminación, su montaje o soporte, circuitos a este efecto, para vehículos en general B60Q; vehículos, equipos o partes de vehículos, no previstos en otro lugar B60R; servicio,limpieza, reparación, elevación o maniobra, no previstos en otro lugar B60S; frenos, sistemas de control de frenos o partes de estos sistemas B60T; vehículos de colchón de aire B60V; ciclos de motor, sus accesorios B62J, B62K; ensayo de vehículos G01M). › Medios sobre el vehículo para regular la inclinación, la holgura o la convergencia de ruedas.
PDF original: ES-2438274_T3.pdf
Fragmento de la descripción:
Suspensión de vehículos de motor
La invención se refiere a una suspensión de rueda para vehículos motorizados según el preámbulo de la reivindicación 1.
En sistemas activos de dirección, en particular para el eje trasero de vehículos, es posible ajustar la convergencia y la distancia entre ruedas por medio de un actuador, de manera que mediante el control del actuador es posible influir en el comportamiento de marcha del vehículo.
Por el documento DE 39 28 135 A1 se conoce una suspensión de rueda de clase genérica para vehículos motorizados. El soporte de rueda de la suspensión de rueda presenta en el lado de rueda un elemento portante que soporta la rueda de vehículo, así como un elemento portante en el lado de eje, entre los cuales está interpuesto un actuador. En este caso, el actuador es un cilindro de ajuste hidráulico que, por un lado, está apoyado en una consola de apoyo del soporte de rueda y, por otro lado, presiona con su vástago de émbolo contra un anillo exterior de rodadura de un cojinete de rueda, con lo cual el cojinete de rueda ejecuta junto con la rueda de vehículo un movimiento pivotante sobre un punto central de articulación para variar un ángulo de convergencia y/o de divergencia o un ángulo de inclinación vertical de la rueda de vehículo respectiva.
La disposición del actuador, conocida por el documento DE 39 28 135 A1, entre la consola de apoyo y el cojinete de rueda ocupa mucho espacio de instalación y es constructivamente complicada con un peso elevado correspondiente. El peso total elevado de la suspensión de rueda es particularmente desventajoso, ya que el soporte de rueda es una masa no amortiguada.
Respecto del entorno técnico se remite, además, al documento WO 98/16418 A.
El objetivo de la invención consiste en proporcionar una suspensión de rueda con un sistema de dirección activo dispuesto en la suspensión de rueda de manera constructivamente sencilla y ocupando poco espacio de instalación.
El objetivo se consigue mediante las características de la reivindicación 1. En las reivindicaciones secundarias se dan a conocer perfeccionamientos ventajosos de la invención.
De acuerdo con la parte significativa de la reivindicación 1, el actuador presenta de manera giratoria sobre sus ejes de giro una respecto de la otra una pieza giratoria en el lado de rueda y una pieza giratoria en el lado de eje, dispuestas entre el elemento portante en el lado de rueda y el elemento portante en el lado de eje. En este caso, la pieza giratoria en el lado de rueda puede ser desviada mediante la torsión de ambas piezas giratorias entre sí en un ángulo de pivotado respecto de la pieza giratoria en el lado de eje. Consecuentemente, también la rueda de vehículo prevista en el elemento portante en el lado de rueda es pivotada en un ángulo de convergencia y/o de inclinación. Consecuentemente, a diferencia con el estado actual de la técnica se produce una modificación del ángulo del elemento portante en el lado de rueda mediante un accionamiento giratorio de una de las piezas giratorias o de las dos piezas giratorias del actuador, y no mediante un movimiento de elevación lineal de un cilindro de ajuste hidráulico que presiona contra el elemento portante en el lado de rueda. La modificación angular se puede producir mediante un accionamiento giratorio en el contrasentido o en el mismo sentido de ambas piezas giratorias, mientras que la otra pieza giratoria no rota sobre su eje.
Según la invención, el eje de giro de la pieza giratoria en el lado de rueda está colocada inclinado respecto del eje de giro de la pieza giratoria en el lado de eje y la pieza giratoria en el lado de rueda puede ser movida con su línea central a la manera de un movimiento oscilatorio sobre su eje de giro. En el movimiento oscilatorio de la pieza giratoria en el lado de rueda, las dos piezas giratorias pueden estar en contacto por medio de superficies de control, preferentemente en contacto deslizante y/o en contacto rodante (rodamiento) que, por su parte, están situados en un plano de rotación. En este caso, el plano de rotación está orientado perpendicular al eje de giro de la pieza giratoria en el lado de rueda. De esta manera, la pieza giratoria en el lado de rueda con el elemento portante correspondiente en el lado de rueda para la rueda del vehículo se puede mover sobre su eje de giro con un movimiento oscilatorio. En este caso, el ángulo de pivotado entre la pieza giratoria en el lado de rueda y la pieza giratoria en el lado de eje varía en función del ángulo de rotación de la pieza giratoria en el lado de rueda.
Según la invención, las dos piezas giratorias del actuador están montadas al elemento portante respectivo de manera giratoria mediante pivotes. De esta manera se puede producir una torsión de ambas piezas giratorias entre sí, sin que se transmita un par a los elementos portantes.
En términos de espacio de instalación es preferente que las dos piezas giratorias estén configuradas como cilindros huecos. Consecuentemente, el espacio interior cilíndrico de los cilindros huecos puede ser usado como espacio de instalación para un accionamiento de regulación, árboles cardán y/o eje sincrónico. En función del espacio de instalaión existente, el accionamiento de regulación también puede estar previsto fuera de las piezas giratorias y conectado en términos motrices con las piezas giratorias. Alternativamente a la configuración cilíndrica hueca, las piezas giratorias también pueden estar fabricadas de material macizo y/o con cualquier forma.
Por lo tanto, mediante un giro del pieza giratoria en el lado de rueda respecto de la pieza giratoria en el lado de eje es posible ajustar el ángulo de pivotado entre las dos piezas giratorias. En este caso, el ángulo de pivotado máximo ajustable es, por razones geométricas, el doble del ángulo de inclinación incluido entre los dos ejes de giro.
Mediante un giro simultáneo o desplazado en el tiempo de la pieza giratoria en el lado de eje respecto del elemento portante en el lado de eje es posible modificar la alineación espacial de la disposición angular formada por las dos piezas giratorias.
Como accionamiento de regulación para las dos piezas giratorias es particularmente apropiado un motor de giro que puede estar dispuesto de manera compacta, optimizando el espacio, dentro de las piezas giratorias cilíndricas huecas. Alternativamente, como ya se ha mencionado, el accionamiento de regulación también puede estar dispuesto fuera de o en combinación tanto en el lado exterior como en el lado interior.
Los accionamientos de regulación para ambas piezas giratorias pueden estar integrados a un sistema de regulación o un circuito de regulación que sobre la base de un ángulo de convergencia nominal o bien de un ángulo de inclinación nominal a regular determina los ángulos de rotación de ambas piezas giratorias. Para un circuito de regulación cerrado, las dos piezas giratorias pueden tener asignados sensores de ángulo que detectan un valor real de ángulo de rotación de ambas piezas giratorias y lo transmite al dispositivo de control. La invención es aplicable a todas las estrategias de regulación con relación a la dinámica de marcha, al confort de marcha, la ajustes de seguridad o al diseño básico del vehículo.
Para una construcción compacta de la suspensión de rueda en sentido transversal al vehículo, las dos piezas giratorias pueden estar dispuestas intercaladas una en la otra. Preferentemente, una de las dos piezas giratorias, por ejemplo la del lado de rueda, puede estar realizada como una pieza perfilada hueca con forma de copa en el que se ha previsto la pieza giratoria en el lado de eje. En este caso, el fondo de la pieza giratoria con forma de copa puede estar configurado como la superficie de control descrita anteriormente, que está en contacto con la superficie de control de la pieza giratoria en el lado de eje.
Adicionalmente, al menos uno de los elementos portantes puede estar realizado como pieza perfilada hueca con forma de copa con una pared perimetral que delimita un espacio de montaje en el que está dispuesto el actuador según la invención. Para un soporte giratorio estable, las piezas giratorias pueden estar apoyadas en la pared perimetral del elemento portante con forma de copa. En la disposición descrita anteriormente de piezas giratorias intercaladas es posible que solamente se apoye la pieza giratoria externa radial sobre la pared perimetral del elemento portante con forma de copa.
De acuerdo con otra forma de realización, entre el elemento portante en el lado de rueda y el elemento portante en el lado de eje puede estar conectado un elemento de acoplamiento adicional, por medio del cual es posible transmitir... [Seguir leyendo]
Reivindicaciones:
1. Suspensión de rueda para vehículos motorizados, con un soporte de rueda (3) que presenta un elemento portante (17) que soporta de manera giratoria una rueda de vehículo (1) y un elemento portante (19) en el lado de eje, entre los cuales se encuentra conectado un actuador (21) con cuya activación el elemento portante (17) en el lado de rueda es pivotante en un ángulo de pivotado (<) respecto del elemento portante (19) en el lado de eje para el ajuste de un ángulo de convergencia y/o de inclinación vertical (5, E) , caracterizada porque el actuador (21) presenta una pieza giratoria (23) en el lado de rueda y una pieza giratoria (25) en el lado de eje torsionables entre sí sobre sus ejes de rotación (27, 28) , y la pieza giratoria (23) en el lado de rueda es desviable en el ángulo de pivotado (<) respecto de la pieza giratoria (25) en el lado de eje al torsionar las dos piezas giratorias (23, 25) , estando el eje de rotación (27) de la pieza giratoria (23) en el lado de rueda inclinada en un ángulo de inclinación (y) respecto del eje de rotación (28) de la pieza giratoria (25) en el lado de eje, y ambas piezas giratorias (23, 25) están montadas de manera giratoria a los elementos portantes (17, 19) respectivos por medio de pivotes (30) y/o rodamientos.
2. Suspensión de rueda según la reivindicación 1, caracterizada porque la pieza giratoria (23) es giratoria con su línea central (29, 29’) sobre el eje de rotación (27) en un movimiento oscilatorio con ángulo de pivotado (<) variable.
3. Suspensión de rueda según una de las reivindicaciones precedentes, caracterizada porque las dos piezas giratorias (23, 25) están en contacto por medio de superficies de control (24, 26) , preferentemente en contacto deslizante y/o rodante, que se encuentran en un plano de rotación (I) perpendicular al eje de rotación (27) de la pieza giratoria (23) en el lado de rueda.
4. Suspensión de rueda según una de las reivindicaciones precedentes, caracterizada porque mediante el giro de la pieza giratoria (23) en el lado de rueda está ajustado el ángulo de pivotado (<) , y mediante el giro de la pieza giratoria (25) en el lado de eje respecto del elemento portante (19) en el lado de eje puede fijarse la alineación espacial de la disposición angular compuesta de las dos piezas giratorias (23, 25) .
5. Suspensión de rueda según una de las reivindicaciones precedentes, caracterizada porque las dos piezas giratorias (23, 25) están conformadas con espacios huecos (35) .
6. Suspensión de rueda según una de las reivindicaciones precedentes, caracterizada porque cada una de las piezas giratorias (23, 25) tiene asignado un accionamiento de regulación (38, 39) , en particular un motor de giro, que está dispuesto, preferentemente, dentro y/o fuera de la pieza giratoria (23, 25) respectiva.
7. Suspensión de rueda según la reivindicación 6, caracterizada porque los accionamientos de regulación (38, 39) de las piezas giratorias (23, 25) tienen asignados un dispositivo de control (49) que, sobre la base de un ángulo nominal de convergencia/ ángulo nominal de inclinación vertical (Esoll, δsoll) determina los ángulos de rotación (a, ß) por medio de los cuales se han de ajustar las piezas giratorias (23, 25) mediante los accionamientos de regulación (38, 39) .
8. Suspensión de rueda según la reivindicación 7, caracterizada porque las piezas giratorias (23, 25) tienen asignados transmisores goniométricos (51) que detectan un valor real de ángulo de rotación (aist, ßist) de las piezas giratorias (23, 25) y lo devuelven al dispositivo de control.
9. Suspensión de rueda según una de las reivindicaciones precedentes, caracterizada porque las dos piezas giratorias (23, 25) pueden estar intercaladas una en otra en sentido axial, estando dispuesta, particularmente, la pieza giratoria (25) en el lado de eje en un espacio hueco (35) de la pieza giratoria (23) en el lado de rueda.
10. Suspensión de rueda según una de las reivindicaciones precedentes, caracterizada porque al menos uno de los dos elementos portantes (17, 19) delimita como pieza perfilada hueca un espacio de montaje (55) en el que, al menos en parte, están dispuestas las dos piezas giratorias (23, 25) .
11. Suspensión de rueda según una de las reivindicaciones precedentes, caracterizada porque entre el elemento portante (17) en el lado de rueda y el elemento portante (19) en el lado de eje se encuentra conectado un elemento de acoplamiento (57) previsto, preferentemente, fuera de las piezas giratorias (23, 25) .
12. Suspensión de rueda según la reivindicación 11, caracterizada porque mediante el elemento de acoplamiento
(57) es posible transmitir un par, por ejemplo un momento de frenado, del elemento portante (17) en el lado de rueda al elemento portante (19) en el lado de eje.
13. Suspensión de rueda según las reivindicaciones 11 o 12, caracterizada porque el elemento de acoplamiento (57) está desacoplado funcionalmente del actuador (21) y/o de las piezas giratorias (23, 25) , y/o separados del actuador (21) por medio de una distancia libre (a) .
14. Suspensión de rueda según las reivindicaciones 11, 12 o 13, caracterizada porque el elemento de acoplamiento (57) es rígido al retorcimiento y/o a la torsión, y permite la desviación de la pieza giratoria (23) en el lado de rueda en un ángulo de pivotado (<) respecto de la pieza giratoria (25) en el lado de eje.
15. Suspensión de rueda según una de las reivindicaciones 11 a 14, caracterizada porque el elemento de acoplamiento (57) es un fuelle metálico que está montado, preferentemente, en el elemento portante (17, 19) en el lado de rueda y en el lado de eje.
16. Suspensión de rueda según la reivindicación 15, caracterizada porque en un espacio de montaje (59) delimitado por el fuelle metálico (57) están dispuestas las piezas giratorias (23, 25) .
17. Suspensión de rueda según una de las reivindicaciones 11 a 14, caracterizada porque el elemento de acoplamiento (57) es una junta cardán.
18. Suspensión de rueda según la reivindicación 17, caracterizada porque la junta cardán (57) presenta un elemento de base (63) dispuesto, preferentemente, radialmente fuera de las piezas giratorias (23, 25) , por ejemplo un elemento anular, y, conectados con los elementos portantes (17, 19) , brazos (65, 66) en el lado de rueda y en el lado de eje que están acoplados de manera articulada al elemento de base (63) por medio de ejes de rotación (67, 69) .
19. Suspensión de rueda según la reivindicación 18, caracterizada porque los brazos (65) en el lado de rueda y los brazos (66) en el lado de eje están desplazados angularmente entre sí formando espacios libres (71) .
20. Suspensión de rueda según una de las reivindicaciones precedentes, caracterizada porque está previsto al menos un dispositivo sensor de ángulo de rotación (79; 81) que detecta un ángulo de rotación (a) entre la pieza giratoria (23) en el lado de rueda y la pieza giratoria (25) en el lado de eje, un ángulo de rotación ( ) entre la pieza giratoria (25) en el lado de eje y el elemento portante (19) en el lado de eje y/o un ángulo de rotación (8) entre la pieza giratoria (23) en el lado de rueda y el elemento portante (17) en el lado de rueda, y lo transmite al dispositivo de control (49) .
21. Suspensión de rueda según la reivindicación 20, caracterizada porque el dispositivo sensor de ángulo de rotación (79, 81) detecta al menos dos de los ángulos de rotación (a, , 8) , y el dispositivo de control (49) deriva de los dos ángulos de rotación (a, , 8) detectados cualquier combinación de regulación y medición de ángulos de rotación (a, , 8) para conseguir un posicionamiento unívoco del actuador (21) .
22. Suspensión de rueda según una de las reivindicaciones 20 y 21, caracterizada porque al prescindir del elemento de acoplamiento (57) y, particularmente, al integrar un cojinete de rueda de rueda a la pieza giratoria (23) en el lado de rueda, el dispositivo sensor de ángulo de rotación (79, 81) detecta los ángulos de rotación (a, ) para el posicionamiento unívoco del actuador (21) .
23. Suspensión de rueda según una de las reivindicaciones 6 a 8, caracterizada porque cada una de las piezas giratorias (23, 25) tiene en el perímetro exterior un cambio de transmisión (73) que conduce al accionamiento de regulación (38, 39) asignado respectivo, en particular a través de los espacios libres (71) .
24. Suspensión de rueda según una de las reivindicaciones 17 a 19, caracterizada porque el centro de la junta cardán (57) está situado a la altura del centro instantáneo de rotación del soporte de rueda (3) .
25. Suspensión de rueda según una de las reivindicaciones 6 a 8, caracterizada porque los accionamientos de regulación (38, 39) están montados en el elemento portante (17, 19) respectivo.
26. Suspensión de rueda según la reivindicación 5, caracterizada porque a través de los espacios huecos (35) de la piezas giratorias (23, 25) se conduce un árbol cardán (58) para el accionamiento de una rueda de vehículo.
27. Procedimiento para la detección de ángulos de rotación (a, ß) de las piezas giratorias (23, 25) de una suspensión de rueda según una de las reivindicaciones 7, 8 y 20 – 22 para la que por medio de un algoritmo de movimiento se calculan los ángulos de rotación (a, ß) sobre la base de un ángulo de convergencia e inclinación vertical (5, E) necesario.
28. Procedimiento según la reivindicación 27, caracterizado porque a partir de los ángulos de rotación (a, ) de las piezas giratorias (23, 25) se calculan, primeramente, las coordenadas (x, y, z) del punto central frontal (M) de la pieza giratoria (23) mediante las ecuaciones siguientes (cálculo hacia adelante) :
x = -r .cosθ . [cos º.sin8. (1 – cosa) + sina. sin ] (1)
y = r . (sin2 θ + cos2 θ . cosa) (2)
z = r . cosθ . [sin º. sinθ . (1 – cosa) – sina. cos ] (3)
donde θ = 90° - y
29. Procedimiento según la reivindicación 28, caracterizado porque de las ecuaciones (1) , (2) y (3) se determinan los ángulos de rotación (a, ) mediante el cálculo hacia atrás de la manera siguiente:
donde x = -r .cos (E) . sin (5)
y = r . cos (E) . cos (5)
z = y. sin (E)
y
r = distancia entre los puntos B y C situados frontalmente sobre la línea central (29) de la pieza giratoria (23) .
30. Procedimiento según la reivindicación 29, caracterizado porque para la comprobación de las cuatro combinaciones posibles de solución para los ángulos de rotación (a, ) en cálculo hacia adelante calcula las coordenadas x, y, z y se comparan con las coordenadas x, y, z del cálculo hacia atrás, y de ello determina las dos combinaciones de solución válidas para los ángulos de rotación (a, ) .
31. Procedimiento según la reivindicación 30, caracterizado porque los ángulos de rotación (a, ) de las dos combinaciones de solución válidas para los ángulos de rotación (a, ) son comparados con los valores ajustados 15 actuales y selecciona la combinación en la cual la diferencia entre el valor actual y la solución es menor.
Patentes similares o relacionadas:
AMORTIGUADOR NEUMOMAGNÉTICO, del 28 de Abril de 2020, de GARCÍA SUÁREZ, Alexander: 1. Amortiguador neumomagnético, del tipo que comprenden un cilindro con un pistón , que se encuentran definiendo una cámara interior […]
SISTEMA DE AMORTIGUACIÓN AJUSTABLE PARA VEHÍCULOS, del 11 de Octubre de 2019, de TEJERO DAMAS, Victor Manuel: 1. Sistema de amortiguación ajustable para vehículos caracterizado porque está configurado a partir de un amortiguador ajustable formado por un resorte , de tal manera […]
Protección contra fuerzas excesivas en una disposición de suspensión, del 29 de Noviembre de 2018, de Teknologian tutkimuskeskus VTT Oy: Una disposición de suspensión para suspender un objeto a un bastidor y para protección contra fuerzas de excitación excesivas (Fe) transmitidas […]
Dispositivo de válvula para un sistema de suspensión neumática, del 17 de Mayo de 2017, de WABCO GMBH: Dispositivo de válvula para un sistema de suspensión neumática en un vehículo, (a) presentando el dispositivo de válvula al menos una conexión de fuelle (14, […]
Dispositivo de válvula para un sistema de suspensión neumática, del 12 de Abril de 2017, de WABCO GMBH: Dispositivo de válvula para un sistema de suspensión neumática en un vehículo, (a) presentando el dispositivo de válvula al menos una conexión de fuelle , […]
Procedimiento para la regulación de una estructura de suspensión neumática de un vehículo, del 18 de Enero de 2017, de SIEMENS AG OSTERREICH: Procedimiento para la regulación de una estructura de suspensión neumática de un vehículo, en donde desde el estado actual de un vehículo se derivan parámetros […]
 Dispositivo de suspensión eléctrica y motocicleta, del 16 de Marzo de 2016, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Un dispositivo de suspensión eléctrica para una motocicleta para absorber choques entre una carrocería de vehículo y una rueda trasera […]
Dispositivo de suspensión eléctrica y motocicleta, del 16 de Marzo de 2016, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Un dispositivo de suspensión eléctrica para una motocicleta para absorber choques entre una carrocería de vehículo y una rueda trasera […]
 Dispositivo y procedimiento de suspensión durante acción por resorte y/o acción de amortiguación para vehículo, del 24 de Febrero de 2016, de BAE SYSTEMS HAGGLUNDS AKTIEBOLAG: Un dispositivo (I; II; III; IV) de suspensión que comprende una configuración de entrada y de salida respectivamente, para un vehículo que comprende […]
Dispositivo y procedimiento de suspensión durante acción por resorte y/o acción de amortiguación para vehículo, del 24 de Febrero de 2016, de BAE SYSTEMS HAGGLUNDS AKTIEBOLAG: Un dispositivo (I; II; III; IV) de suspensión que comprende una configuración de entrada y de salida respectivamente, para un vehículo que comprende […]