Sistema de seguimiento de objetos y de análisis de la situación.
Sistema de análisis de la situación para la detección y seguimiento de objetos móviles dentro de un espacio limitado a través de un periodo de tiempo predeterminable y para el análisis de constelaciones de objetos y episodios de tiempo así como situaciones durante el periodo de tiempo,
con varias unidades de seguimiento, que presentan, respectivamente, al menos una subunidad en forma de una cámara, que está dispuesta y alineada de tal manera que puede detectar el espacio limitado y los objetos fijos y móviles que se encuentran en él, en el que las cámaras contienen, respectivamente, un objetivo y un sensor de detección de imágenes, y con una unidad central de procesamiento de datos de la posición, que está configurada para determinar para un objeto real respectivo una posición global del objeto real respectivo en el espacio registrado y para generar para cada objeto real una identificación global del objeto y un conjunto de datos globales respectivos de la posición en función del tiempo, en el que las cámaras de las unidades de seguimiento contienen, respectivamente, una unidad de adquisición de imágenes y una unidad de reconocimiento de objetos, cuya unidad de reconocimiento de objetos está configurada para aislar objetos individuales en imágenes detectadas por el sensor de detección de imágenes y pre-procesadas por la unidad de adquisición de imágenes, y en el que cada unidad de seguimiento dispone de al menos una unidad de transmisión de datos, a través de la cual cada unidad de seguimiento está conectada con la unidad central de procesamiento de datos de la posición y que está configurada para permitir una comunicación bidireccional, de manera que cada unidad de seguimiento puede transmitir datos a la unidad central de procesamiento de datos de la posición, caracterizado por que la unidad central de procesamiento de datos de la posición puede transmitir a través de un canal de retorno a cada unidad de seguimiento individualmente o a varias unidades de seguimiento al mismo tiempo datos para el control del comportamiento de detección de las unidades de seguimiento.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2006/002740.
Solicitante: fluyds GmbH.
Nacionalidad solicitante: Alemania.
Dirección: Bautzener Strasse 17 10829 Berlin ALEMANIA.
Inventor/es: FRANK,MARGIT, SCHNATMANN,LARS MARIA.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01S5/16 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 5/00 Establecimiento de la posición mediante la coordinación de dos o más determinaciones de dirección o de líneas de posición; Establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia. › que utilizan ondas electromagnéticas que no sean ondas de radio.
PDF original: ES-2529066_T3.pdf
Fragmento de la descripción:
Sistema de seguimiento de objetos y de análisis de la situación
La invención se refiere a un sistema para el seguimiento de objetos y para el análisis de la situación para procesos dinámicos con objetos móviles en un espacio limitado, por ejemplo para la detección y seguimiento de jugadores y pelota durante un partido de fútbol y para el análisis de diferentes situaciones de juego, como se conocen a partir de los documentos WO 2/71334, FR 2 726 37, EP 1 113 669, US 23/179294, US 5 363 297 o a partir de XU M ET AL: "Architecture and algorithms for tracking football players with múltiple cameras", INTELLIGENT DISTRIBUTED SURVEILLANCE SYSTEMS, IEE, LONDON, GB, 23. Febrero de 24 (24-2-23), páginas 51-55, XP233114. Los objetos móviles son entonces jugadores y pelota. El espacio limitado es el campo de fútbol.
La ¡dea inventiva no está limitada de ninguna manera solamente a la detección de juegos de fútbol en un campo de fútbol. Puede encontrar aplicación también para la detección de juegos de pelota discrecionales u otros procesos móviles con varios objetos móviles. Tampoco la detección puede tener lugar en un espacio limitado discrecional y, por lo tanto, no está limitada a la detección en un campo de juego.
El sistema trabaja en tiempo real para poder proporcionar continuamente resultados de análisis y representaciones gráficas paralelamente al acontecimiento del juego. El acontecimiento del juego se detecta y analiza en este caso al menos 12 veces por segundo, con preferencia 25 veces por segundo, de manera que los resultados del análisis se pueden actualizar continuamente con una frecuencia comparable a la velocidad de percepción del ojo humano. Los resultados del análisis están preparados en virtud de la implementación distribuida del sistema con una latencia reducida que, en general, no es mayor que el intervalo de tiempo entre dos puntos de detección sucesivos; no obstante, también puede ser mayor que el intervalo de tiempo entre dos instantes de detección y de análisis sucesivos. La latencia es constante en formas de realización preferidas para cada instante de detección, pero en cualquier caso menor que un máximo establecido.
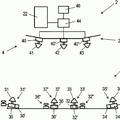
El sistema comprende una o varias unidades de seguimiento, que están configuradas para la detección de objetos y para la determinación de las coordenadas espaciales de los objetos detectados y están conectadas con una unidad central de procesamiento de datos de la posición. En cada una de las unidades de seguimiento empleadas se puede utilizar una de ellas para la selección de procedimientos de medición para la determinación de las coordenadas espaciales. Así, por ejemplo en una forma de realización de una unidad de seguimiento está previsto proveer los objetos a detectar (pelota, árbitro, jugadores) con sensores, que permiten una determinación del lugar de permanencia, emitiendo ellos mismos señales o reaccionando de manera correspondiente a una señal de medición emitida. La determinación propiamente dicha se puede realizar entonces a través de ondas de sonar o señales electromagnéticas, por ejemplo sobre la base de la determinación del tiempo de propagación o del efecto Doppler. La unidad de seguimiento propiamente dicha se divide entonces, dado el caso, en dos o más subunidades, que están distribuidas en diferentes posiciones alrededor y sobre el campo de juego y que reciben y evalúan las señales emitidas por los sensores.
Cada unidad de seguimiento dispone de al menos una unidad de detección de objetos. Si una unidad de seguimiento dispone de varias subunidades, entonces cada subunidad dispone con preferencia de una unidad propia de detección de objetos. En este caso, la unidad de seguimiento pude disponer de una central local de detección de objetos, que procesa los conjuntos de datos creados por las unidades de detección de objetos de las subunidades individuales y que se refieren a un objeto detectado y que se comunica con la unidad central de procesamiento de datos de la posición. Si el sistema de análisis de la situación solamente presenta una unidad de seguimiento, no está prevista ninguna central local de detección de objetos; en este caso, la unidad central de procesamiento de datos de la posición asume los cometidos de la central local de detección de objetos.
Las unidades de detección de objetos están configuradas para asociar los datos de medición brutos que se producen durante la detección de los objetos a objetos individuales. Dentro de las unidades de detección de objetos no se lleva a cabo en este caso ninguna identificación de los objetos individuales, a no ser que durante el procedimiento de medición utilizado, en virtud del emplazamiento de un sensor, se establezca desde el principio la identidad del objeto respectivo. Es decir, que cada unidad de seguimiento, tomada por sí misma, asocia a cada objeto detectado por ella un distintivo de identificación local, que se puede distinguir del distintivo de distinción asociado por otra unidad de seguimiento del sistema de detección al mismo objeto. Todos los conjuntos de datos detectados son registrados durante toda la duración del juego en una base de datos central del sistema, de manera que están disponibles también para una reconstrucción y un análisis posterior de todos los toques del juego. La base de datos central del sistema contiene también un conocimiento a priori, que se refiere por ejemplo el peso o el tamaño de los jugadores o las asociaciones de los jugadores o dato registrados durante la detección de otro juego por el sistema de análisis de la situación. La base de datos del sistema es, por lo tanto, una base de datos que abarca todo el juego, cuyo contenido se desarrolla y se analiza continuamente durante el empleo del sistema retornando los datos obtenidos durante el funcionamiento, como indicaciones del número de los saques de esquina, tiros a puerta, pases correctos o erróneos, faltas, etc. a la base de datos del sistema. Adicionalmente, la existencia de datos de la base de daos del sistema se puede ampliar fuera del funcionamiento. Así, por ejemplo, las informaciones que se refieren a los jugadores o combinaciones como pertenencia al equipo, breves biografías de los
jugadores, número de los empleos en la selección nacional respectiva, estado de salud y disponibilidad para el empleo, bloqueos del juego, etc. pueden ser recibidas en la base de datos del sistema.
De acuerdo con el procedimiento de medición empleado, una unidad de seguimiento puede asociar (a través de su unidad de detección de objetos) a uno y el mismo objeto en el transcurso del periodo de tiempo de la supervisión varios distintivos de identificación locales. Esto pasa siempre que un objeto abandona la parte del campo de juego detectada por la unidad de seguimiento respectiva y entra de nuevo, a no ser que el procedimiento de medición utilizado no posibilite automáticamente una identificación del objeto detectado a través del sensor utilizado. Durante un periodo de tiempo de detección (duración del juego) no se predetermina por una unidad de seguimiento el mismo distintivo de identificación por segunda vez.
La unidad de detección de objetos de cada unidad de seguimiento asocia, respectivamente, a un objeto detectado en un instante de detección tn+i el distintivo de identificación de un objeto detectado en el último instante de detección tn que está delante de este instante (presumiblemente del mismo objeto) siempre que la distancia espacial de las coordenadas de la posición del objeto detectado en los dos instantes de detección no exceda un valor umbral determinado, por lo que el objeto detectado ha recorrido como máximo un trayecto determinado dentro de la diferencia de tiempo entre los dos instantes de la detección.
El valor umbral se puede predeterminar de acuerdo con el tipo de objeto (una pelota se moverá normalmente más rápidamente que un jugador) y se puede modificar de forma adaptable a través de un algoritmo durante la detección. Así, por ejemplo, se puede bajar el valor umbral cuando el objeto detectado (un jugador) se ha movido últimamente más lento o más rápido, y se eleva cuando el objeto detectado se ha movimiento últimamente siempre más rápido.
La distancia de las coordenadas de la posición, que tendría como consecuencia una asociación positiva del mismo distintivo de identificación local a un objeto detectado en dos instantes de detección sucesivos, se indica con preferencia en el conjunto de datos que designa la nueva posición del objeto detectado, con preferencia como vector.
Ya durante la asociación de los distintivos de identificación se pueden excluir del procesamiento posterior objetos que no pertenecen al juego, verificando determinadas reglas para las propiedades de movimiento de jugadores... [Seguir leyendo]
Reivindicaciones:
1.- Sistema de análisis de la situación para la detección y seguimiento de objetos móviles dentro de un espacio limitado a través de un periodo de tiempo predeterminable y para el análisis de constelaciones de objetos y episodios de tiempo así como situaciones durante el periodo de tiempo, con varias unidades de seguimiento, que presentan, respectivamente, al menos una subunidad en forma de una cámara, que está dispuesta y alineada de tal manera que puede detectar el espacio limitado y los objetos fijos y móviles que se encuentran en él, en el que las cámaras contienen, respectivamente, un objetivo y un sensor de detección de imágenes, y con una unidad central de procesamiento de datos de la posición, que está configurada para determinar para un objeto real respectivo una posición global del objeto real respectivo en el espacio registrado y para generar para cada objeto real una identificación global del objeto y un conjunto de datos globales respectivos de la posición en función del tiempo, en el que las cámaras de las unidades de seguimiento contienen, respectivamente, una unidad de adquisición de imágenes y una unidad de reconocimiento de objetos, cuya unidad de reconocimiento de objetos está configurada para aislar objetos individuales en imágenes detectadas por el sensor de detección de imágenes y pre-procesadas por la unidad de adquisición de imágenes, y en el que cada unidad de seguimiento dispone de al menos una unidad de transmisión de datos, a través de la cual cada unidad de seguimiento está conectada con la unidad central de procesamiento de datos de la posición y que está configurada para permitir una comunicación bidireccional, de manera que cada unidad de seguimiento puede transmitir datos a la unidad central de procesamiento de datos de la posición, caracterizado por que la unidad central de procesamiento de datos de la posición puede transmitir a través de un canal de retorno a cada unidad de seguimiento individualmente o a varias unidades de seguimiento al mismo tiempo datos para el control del comportamiento de detección de las unidades de seguimiento.
2 - Sistema de análisis de la situación de acuerdo con la reivindicación 1, caracterizado por que al menos una unidad de seguimiento del sistema de análisis de la situación dispone de al menos un sensor emplazado en uno de los objetos a detectar y está configurada para determinar la posición del objeto provisto con el sensor por medio de ondas de sonar o señales electromagnéticos.
3 - Sistema de análisis de la situación de acuerdo con una de las reivindicaciones 1 ó 2, caracterizado por que al menos una unidad de seguimiento del sistema de análisis de la situación presenta al menos dos subunidades, respectivamente, con una cámara de medición, en el que las cámaras de medición de las subunidades de la unidad de seguimiento están dispuestas y alineadas de tal manera que pueden detectar el espacio limitado y los objetos fijos y móviles que se encuentran en él desde diferentes perspectivas y comprenden, respectivamente, un objetivo, un sensor de imágenes, una unidad de adquisición de imágenes y una unidad de procesamiento de imágenes, que están dispuestas y alineadas de tal forma que el objetivo respectivo proyecta una reproducción bidimensional del espacio detectado y de los objetos sobre un sensor de imágenes respectivo, que está conectado, por su parte, con una unidad de adquisición de imágenes respectiva para el pre-procesamiento de la imagen detectada por el sensor de imágenes, en el que la unidad de procesamiento de imágenes recibe datos de la imagen desde la unidad de adquisición de imágenes.
4.- Sistema de análisis de la situación de acuerdo con la reivindicación 1 ó 3, caracterizado por que la unidad de reconocimiento de objetos está configurada para aislar objetos individuales por medio de un procedimiento de modulación, como modulación de color, modulación de la diferencia, modulación de la luminancia o detección de cantos y para aplicar de acuerdo con criterios predeterminables de una manera variable a través del canal de retorno un procedimiento se modulación o varios procedimientos de modulación al mismo tiempo sobre los datos de Imágenes detectados.
5.- Sistema de análisis de la situación de acuerdo con la reivindicación 3 o la reivindicación 4 con la reivindicación 3, caracterizado por que cada cámara de medición dispone de una memoria tampón, que está configurada para registrar una pluralidad de las imágenes registradas en cada instante del funcionamiento en último término por la cámara de medición.
6.- Sistema de análisis de la situación de acuerdo con la reivindicación 5, caracterizado por que cada cámara de medición está configurada para obtener imágenes en una primera resolución alta de imágenes y registrarlas en su memoria tampón y por que la unidad de procesamiento de imágenes de cada cámara de medición está configurada para calcular a partir de las imágenes obtenidas sucesivamente a través de la aplicación de un procedimiento de escala imágenes de una segunda resolución reducida y para transmitirlas a través de la unidad de transmisión de datos de la cámara de medición a la unidad central de procesamiento de datos de la posición así como para transmitirlas a demanda de la unidad central de procesamiento de datos de la posición de al menos una de las imágenes registradas en la memoria tampón de la primera resolución alta a la unidad central de procesamiento de datos de la posición.
7.- Sistema de análisis de la situación de acuerdo con una de las reivindicaciones 3, 4 con 3, 5 ó 6, caracterizado por que al menos una unidad de detección de imágenes de una unidad de seguimiento está configurada para detectar en la reproducción bidireccional detectada respectiva objetos individuales y su posición dentro de la reproducción bidimensional y para generar para cada objeto detectado en el instante respectivo un conjunto de datos de la posición específicos de la cámara con un distintivo de identificación unívoco , que solamente se predetermina una sola vez durante un juego, y para transmitir el conjunto de datos de la posición a la unidad central de procesamiento
de datos de la posición, en el que el conjunto de datos de la posición específico de la cámara para cada objeto recibe una identificación Individual del objeto así como los datos de la posición específicos de la cámara asociaos a este objeto en el Instante respectivo, y por que la unidad central de procesamiento de datos de la posición está configurada para asociar las identificaciones de los objetos respectivas, que proceden de las cámaras de medición individuales, entre sí, de manera que todas las identificaciones de los objetos están asociadas, respectivamente, a un objeto real, y para determinar la posición global del objeto real respectivo en el espacio detectado a partir de los datos de la posición específicos de la cámara de los conjuntos de datos de la posición específicos de las cámaras y para generar para cada objeto real una identificación global del objeto y un conjunto de datos de la posición global correspondiente en función del tiempo.
8- Sistema de análisis de la situación de acuerdo con una de las reivindicaciones anteriores, caracterizado por un módulo de análisis que genera una estructura de datos sobre la base de los conjuntos de datos de la posición global generados por la unidad central de procesamiento de datos de la posición, recibe los datos de tiempo y de la posición, que identifican aquellos periodos de tiempo y objetos, en los que algunos de los objetos detectados presentan una distancia espacial y un intervalo de tiempo entre sí reducidos frente a valores umbrales predeterminados, en el que el módulo de análisis está configurado para calcular la proximidad estrecha como una función del tiempo a través de la comparación de un valor de la distancia registrado, que debe predeterminarse, como valor umbral, con las distancias de los objetos que resultan a partir de los datos de la posición con relación a los objetos individuales.
9.- Sistema de análisis de la situación de acuerdo con la reivindicación 8, caracterizado por que el módulo de análisis está configurado para predeterminar a través del canal de retorno para cada unidad de seguimiento unos parámetros de funcionamiento, que indican la posición y la magnitud de una sección a transmitir en una resolución elevada desde la unidad de seguimiento hasta el módulo de análisis de una imagen igualmente designada y/o pueden referirse a criterios para la realización de un procedimiento de modulación o una combinación de procedimientos de modulación.
1.- Sistema de análisis de la situación de acuerdo con la reivindicación 9, caracterizado por que el módulo de análisis está configurado para derivar en virtud de la comparación de posiciones ya detectadas de objetos la dirección del movimiento y la velocidad del movimiento y para anticipar en virtud de reglas relacionadas con el juego situaciones especiales del juego y para predeterminar para la detección de estas situaciones especiales del juego ya antes de su aparición a través del canal de retorno parámetros de funcionamiento adaptados para al menos una unidad de seguimiento.
11.- Sistema de análisis de la situación de acuerdo con una de las reivindicaciones anteriores, caracterizado por un módulo de visualización, que presenta una unidad de visualización, que está conectada con el módulo de análisis y está configurada para acceder en cualquier momento a las estructuras de datos respectivas y para derivar a partir de éstas unas representaciones gráficas, dinámicas, en función del tiempo de las posiciones y de las constelaciones de los objetos.
12.- Sistema de análisis de la situación de acuerdo con la reivindicación 11, caracterizado por que el módulo de visualización está configurado para calcular y representar una representación gráfica virtual de una vista de todo el juego o de una parte del juego de acuerdo con la técnica de datos desde una perspectiva discrecional opcional, en particular móvil.
Patentes similares o relacionadas:
 Aparato automáticamente desplazable y procedimiento de guiado de tal aparato para dirigirlo a un punto de destino, del 29 de Julio de 2020, de VORWERK & CO. INTERHOLDING GMBH: Aparato automáticamente desplazable , especialmente aparato de limpieza para limpiar un suelo , tal como un robot de aspiración y/o barrido, con uno o […]
Aparato automáticamente desplazable y procedimiento de guiado de tal aparato para dirigirlo a un punto de destino, del 29 de Julio de 2020, de VORWERK & CO. INTERHOLDING GMBH: Aparato automáticamente desplazable , especialmente aparato de limpieza para limpiar un suelo , tal como un robot de aspiración y/o barrido, con uno o […]
Sistema de detección de localización de fuente de luz, del 6 de Mayo de 2020, de Thales Defense & Security, Inc: Un sistema para rastrear una orientación de un primer objeto , comprendiendo el sistema: un dispositivo de emisión de luz situado con respecto […]
Procedimiento y dispositivo para determinar la distancia entre un receptor aéreo y un emisor terrestre fijo, del 19 de Junio de 2019, de MBDA FRANCE: Procedimiento para la determinación continua de la distancia entre un receptor aéreo (R) móvil de manera conocida en una trayectoria conocida (T) y un […]
SISTEMA INFO-OPTICO PARA LA MONITORIZACIÓN DEL MOVIMIENTO DE ROEDORES DE LABORATORIO, del 10 de Enero de 2019, de UNIVERSIDAD DE MURCIA: Sistema info-óptico para la monitorización del movimiento de roedores de laboratorio. La presente invención consiste en un sistema info-óptico diseñado […]
SISTEMA DE POSICIONAMIENTO, del 10 de Enero de 2019, de IBAÑEZ CRUZ, Javier: Especialmente concebido para espacios cubiertos de grandes dimensiones, está constituido a partir de una serie de módulos espaciales estáticos convenientemente […]
 Sistema de navegación de campo próximo, del 31 de Octubre de 2018, de Airbus Defence and Space GmbH: Sistema de navegación de campo próximo que comprende un primer objeto y un segundo objeto, navegando el primer objeto en relación con el segundo objeto,
[…]
Sistema de navegación de campo próximo, del 31 de Octubre de 2018, de Airbus Defence and Space GmbH: Sistema de navegación de campo próximo que comprende un primer objeto y un segundo objeto, navegando el primer objeto en relación con el segundo objeto,
[…]
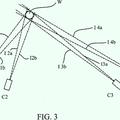 Medición óptica de hilo aéreo, del 27 de Septiembre de 2018, de JRB ENGINEERING PTY LTD: Método de medición óptica de una ubicación de uno o más objetos (W1-W6) que comprende:
obtener datos (22b) de imagen estereoscópica para el […]
Medición óptica de hilo aéreo, del 27 de Septiembre de 2018, de JRB ENGINEERING PTY LTD: Método de medición óptica de una ubicación de uno o más objetos (W1-W6) que comprende:
obtener datos (22b) de imagen estereoscópica para el […]
SISTEMA INTERIOR DE LOCALIZACION EN ENTORNOS METÁLICOS., del 27 de Junio de 2018, de SKYLIFE ENGINEERING, S.L: Sistema interior de localización en entornos metálicos basado en un sistema de posicionamiento destinado a entornos donde la recepción de señales […]