Sistema de integración de datos.
Un procedimiento de integración de marcas de agua, que comprende:
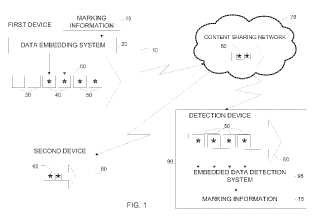
recibir la información (15) de marcado;
representar la información (15) de marcado como un vector de 2 coordenadas, denotado ω, donde las 2coordenadas se denotan, respectivamente, como α, β, de manera que ω ≥ (α, β); yproporcionar un fotograma de vídeo a ser marcado, en el que el fotograma de vídeo comprende unapluralidad de píxeles, en el que cada píxel de entre la pluralidad de píxeles se representa como p, en el que p≥ (x, y), en el que x e y comprenden coordenadas de píxel p,
en el que la pluralidad de píxeles están representados como una tríada de elementos de color, denotados,respectivamente, como R, G y B; y caracterizado por que el procedimiento comprende además:marcar el fotograma de vídeo transformando cada píxel de entre la pluralidad de píxeles de la manerasiguiente:
R'(p) ≥ R(p) + ;
G'(p) ≥ G(p) + ; y
B'(p) ≥ B(p) + ,
en las que:
ωR, ωG y ωB representan la información de marcado codificada como tres vectores de 2 coordenadassobre la tríada de elementos de color R, G y B;
representa una operación de producto escalar sobre p y ωR;
representa una operación de producto escalar sobre p y ωG; y
representa una operación de producto escalar sobre p y ωB.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/IB2008/050104.
Solicitante: NDS LIMITED.
Inventor/es: GEYZEL,ZEEV, DORRENDORF,LEONID.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G06T1/00 FISICA. › G06 CALCULO; CONTEO. › G06T TRATAMIENTO O GENERACIÓN DE DATOS DE IMAGEN, EN GENERAL. › Tratamiento de datos de imagen, de aplicación general.
PDF original: ES-2447890_T3.pdf
Fragmento de la descripción:
Sistema de integración de datos Campo de la invención La presente invención se refiere a sistemas de integración de datos y, particularmente, a sistemas de integración de datos que usan una identificación única como entrada.
Antecedentes de la invención Con los recientes avances en la distribución de contenidos en Internet, incluyendo las redes peer-to-peer y los sistemas de transmisión de video en tiempo real, con el fin de prevenir la distribución no autorizada de contenidos, es importante integrar datos en los vídeos para rastrear el punto de distribución. Frecuentemente, el punto de distribución es un espectador autorizado, tal como un cine donde se realizan copias piratas con cámaras de vídeo,
o un decodificador de TV, cuya salida es capturada y re-codificada en un archivo de vídeo. Después de rastrear la fuente, pueden tomarse medidas para prevenir una distribución no autorizada adicional.
La integración de señales en vídeo es un campo rico, tanto en la investigación académica como en las invenciones comerciales. La aplicación de marcas de agua encubiertas en el de dominio de la compresión (MPEG) es bien conocido en la técnica, al igual que las marcas de agua obvias que aparecen como mapas de bits sobre el vídeo, y marcas de agua esteganográficas.
Digital Watermarking of Visual Data: State of the Art and New Trends, por M. Barni, F. Bartolini y A. Piva., Congres Signal processing X: Theories and Applications (Tampere, 4-8 Septiembre 2000) , EUPSICO 2000: European Signal Processing Conference No 10, Tampere, Finlandia (04/09/2000) , revisa el estado del arte en la aplicación de marcas de agua digitales a los datos visuales. Se adopta una perspectiva de comunicación para identificar los temas principales en la aplicación de marcas de agua digitales y para presentar las soluciones más comunes adoptadas por la comunidad investigadora. Los autores consideran, en primer lugar, los diversos enfoques de integración y ocultación de marcas de agua. A continuación, se tiene en cuenta el canal de comunicación, y se revisan las principales tendencias de investigación en el modelado de ataques. Se presta especial atención a la recuperación de la marca de agua debido al impacto que tiene sobre la fiabilidad final de todo el sistema de aplicación de marcas de agua.
Multichannel Watermarking of Color Images, por M. Barni, F. Bartolini y A. Piva., publicado en IEEE Transactions on Circuits and Systems for Video Technology, Vol. 12, Nº 3, Marzo de 2002, describe que en el campo de las marcas de agua para imágenes, la investigación se ha centrado principalmente en las marcas de agua para imágenes en escala de grises, mientras que la extensión al caso de imágenes a color se consigue normalmente mediante el marcado de la imagen usando luminancia, o mediante el procesamiento de cada canal de color por separado. En este artículo, se presenta una técnica de marcado de agua en el dominio DCT, diseñada expresamente para aprovechar las peculiaridades de las imágenes en color. La marca de agua es ocultada dentro de los datos modificando un subconjunto de los coeficientes DCT de imagen completa de cada canal de color. La detección se basa en una medida de correlación global que se calcula teniendo en cuenta la información transmitida por los tres canales de color, así como su interdependencia. En última instancia, para decidir si la imagen contiene o no la marca de agua, el valor de correlación es comparado con un valor umbral. Con respecto a los algoritmos en escala de grises existentes, se propone un nuevo enfoque de selección de umbral, que permite reducir la probabilidad de falsas detecciones a un mínimo, garantizando al mismo tiempo una probabilidad determinada de detecciones falsas. Se presentan resultados experimentales, así como un análisis teórico, para demostrar la validez del nuevo enfoque con respecto a los algoritmos que operan solamente en la luminancia de la imagen.
Digital Watermarking for 3D Polygons using Multiresolution Wavelet Decomposition, por Satoshi Kanai, Hiroaki Date y Takeshi Kishinami, disponible en la World Wide Web en citeseer.ist.psu.edu/504450.html, describe que, recientemente, existe un gran interés en procedimientos para proteger los derechos de autor de los datos digitales y prevenir la duplicación ilegal de los mismos. Sin embargo, en el área de CAD/CAM y CG, no hay maneras efectivas para proteger los derechos de autor de los modelos geométricos en 3D. Como una primera etapa para resolver este problema, en este artículo se introduce un nuevo procedimiento de aplicación de marcas de agua digitales para los modelos poligonales en 3D. La aplicación de marcas de agua es uno de los procedimientos de protección de derechos de autor en los que una marca de agua invisible es integrada en secreto en los datos originales. El procedimiento propuesto de aplicación de marca de agua se basa en la transformada de tren de ondas (Wavelet Transform, WT) y la representación multirresolución (Multiresolution Representation, MRR) del modelo poligonal. La marca de agua puede ser integrada en los vectores de coeficientes de tren de ondas grandes en diferentes niveles de resolución de la MRR. Esto hace que la marca de agua integrada sea imperceptible e
invariable con relación a la transformación afín. Y también hace que el control del error geométrico causado por la marca de agua sea fiable. En primer lugar, se analizan los requisitos y las características del procedimiento de aplicación de marca de agua propuesto. En segundo lugar, se muestran las formulaciones matemáticas de WT y MRR del modelo poligonal. En tercer lugar, se propone el algoritmo de inserción y extracción de la marca de agua. Finalmente, se muestra la eficacia del procedimiento de aplicación de marca de agua propuesto mediante diversos resultados de simulación.
La patente US Nº 7.068.809 de Stach describe un procedimiento en el que se usan técnicas de segmentación en los procedimientos de integración y detección de marcas de agua digitales en señales multimedia, tales como imágenes, vídeo y audio. Un integrador de marcas de agua digitales segmenta una señal multimedia en regiones con formas arbitrarias en base a una característica de la señal, tal como una medida de similitud, una medida de textura, una medida de forma o luminancia u otra medida extrema de valor de color. A continuación, los atributos de estas regiones son usados para adaptar una señal auxiliar de manera que sea ocultada más eficazmente en la señal multimedia. En una implementación ejemplar, el procedimiento de segmentación hace uso de un modelo de perceptibilidad humana para agrupar muestras de una señal multimedia en regiones contiguas en base a sus similitudes. A continuación, los atributos de la región, tales como sus características de frecuencia, son adaptados a las características de frecuencia de una señal de marca de agua deseada. Un procedimiento de integración ajusta una característica de la región para integrar elementos de una señal auxiliar, tal como una señal de mensaje codificada con corrección de errores. El procedimiento de detección vuelve a calcular la segmentación, calcula las mismas características y asigna los valores de características a símbolos para reconstruir una estimación de la señal auxiliar. A continuación, la señal auxiliar es demodulada o decodifica para recuperar el mensaje usando operaciones de decodificación/demodulación de corrección de errores.
La patente US Nº 6.950.532, de Schumann et al., describe un sistema visual de protección de derechos de autor, en el que el sistema visual de protección de derechos de autor incluye el contenido de entrada, un procesador de interrupción y el contenido de salida. El procesador de interrupción inserta contenido de interrupción al contenido de entrada, creando un contenido de salida que impide la capacidad de los dispositivos ópticos de grabación de realizar copias útiles del contenido de salida.
El resumen de la patente de Japón para JP11075055 describe un procedimiento en el que se integra información secreta en una señal de luminancia, y la información de posición de la información secreta es integrada en una señal de color correspondiente. Un sistema M, que es uno de los números pseudo aleatorios (sistemas PN) , es usado para un procedimiento de integración de la información secreta. Una señal de imagen es dividida como un bloque de N valores de píxeles, y se añade un número pseudo aleatorio de longitud N. Esta operación se ejecuta para cada bloque de una señal de imagen de entrada, de manera que puede constituirse una señal de imagen en la que se integra información secreta. El número pseudo aleatorio se solapa sobre la posición de una señal de color correspondiente a la posición... [Seguir leyendo]
Reivindicaciones:
1. Un procedimiento de integración de marcas de agua, que comprende: recibir la información (15) de marcado; representar la información (15) de marcado como un vector de 2 coordenadas, denotado ω, donde las 2
coordenadas se denotan, respectivamente, como α, β, de manera que ω = (α, β) ; y proporcionar un fotograma de vídeo a ser marcado, en el que el fotograma de vídeo comprende una pluralidad de píxeles, en el que cada píxel de entre la pluralidad de píxeles se representa como p, en el que p = (x, y) , en el que x e y comprenden coordenadas de píxel p, en el que la pluralidad de píxeles están representados como una tríada de elementos de color, denotados,
respectivamente, como R, G y B; y caracterizado por que el procedimiento comprende además: marcar el fotograma de vídeo transformando cada píxel de entre la pluralidad de píxeles de la manera siguiente: R’ (p) = R (p) + <p, ωR>; G’ (p) = G (p) + <p, ωG>; y
B’ (p) = B (p) + <p, ωB>, en las que: ωR, ωG y ωB representan la información de marcado codificada como tres vectores de 2 coordenadas sobre la tríada de elementos de color R, G y B; <p, ωR> representa una operación de producto escalar sobre p y ωR; 20 <p, ωG> representa una operación de producto escalar sobre p y ωG; y <p, ωB> representa una operación de producto escalar sobre p y ωB.
2. Procedimiento según la reivindicación 1 y en el que la información (15) de marcado comprende al menos uno de entre: información que identifica un dispositivo (10) de presentación; 25 una marca de derechos de autor; y
datos de derecho de acceso; y/o en el que la información que identifica un dispositivo (10) de representación comprende un identificador de dispositivo único; y/o en el que los datos de derecho de acceso comprende un permiso de reproducción/copia.
3. Procedimiento según la reivindicación 1 ó 2 y en el cada píxel comprende un elemento de color rojo-verde-azul;
o cada píxel comprende un elemento de color de crominancia/luminancia.
4. Procedimiento según la reivindicación 3 y en el que el elemento de color de crominancia/luminancia comprende uno de entre: un elemento de color de crominancia/luminancia YCbCr. 35 un elemento de color de crominancia/luminancia YPbPr.
un elemento de color de crominancia/luminancia YDbDr. un elemento de color de crominancia/luminancia xvYCC.
5. Procedimiento según cualquiera de las reivindicaciones 1 - 4 y en el que R’ (p) , G’ (p) y B’ (p) no exceden un valor
máximo permitido para cada dicho elemento de color en un sistema de representación de color o R’ (p) , G’ (p) y 40 B’ (p) no son menores de un valor mínimo permitido para cada dicho elemento de color en un sistema de representación de color.
6. Procedimiento según la reivindicación 5 y en el que cualquiera de entre R’ (p) , G’ (p) y B’ (p) se truncan para garantizar que cualquiera de entre R' (p) , G’ (p) y B' (p) no excedan el valor máximo o cualquiera de entre R’ (p) , G’ (p) y B’ (p) se elevan para garantizar que cualquiera de entre R' (p) , G’ (p) y B' (p) no sean menores que el valor
mínimo.
7. Procedimiento según cualquiera de las reivindicaciones 1 - 6 y en el que la representación de la información (15) de marcado como un vector de 2 coordenadas comprende: expresar la información (15) de marcado como una cadena de bits; subdividir la cadena de bits en una pluralidad de sub-cadenas de bits; y
traducir cada una de entre la pluralidad de sub-cadenas de bits a un vector de 2 coordenadas correspondiente.
8. Procedimiento según la reivindicación 7 y en el que cada una de entre la pluralidad de sub-cadenas de bits comprende una de entre: una cadena de bits de tres bits y una cadena de bits de dos bits.
9. Un procedimiento de extracción de marcas de agua que comprende:
capturar una secuencia (60) de vídeo que comprende datos integrados; y segmentar la secuencia (60) de vídeo en una pluralidad de fotogramas de vídeo comprendidos en la misma; localizar un centro de masa de color, denotado C’, para cada elemento de color R, G y B de cada fotograma de vídeo individual de entre la pluralidad de fotogramas de vídeo sumando los componentes de color según
en el que M representa uno de los elementos de color R, G o B, M* representa la masa de color ΣM (p) , que es la suma de todos los valores de elemento de color M en cada píxel en dicho fotograma individual;
p representa cada píxel en un fotograma de vídeo; en el que el procedimiento comprende además:
localizar un centro de masa de color, denotado C, para cada elemento de color de un fotograma de vídeo individual correspondiente, en el que el fotograma de vídeo individual correspondiente corresponde a un fotograma de vídeo que no comprende datos integrados;
restar C de C’ para determinar una diferencia D, en la que
ωM representa la información de marcado codificada como tres vectores de 2 coordenadas, uno para cada uno de los elementos de color R, G y B, y
derivar, a partir de la diferencia D, un valor de una primera coordenada α y una segunda coordenada β, a 35 partir de la ecuación aproximada en las que W representa la anchura de un fotograma en píxeles y H representa la altura del fotograma en 16 5
píxeles, en el que:
la primera coordenada α y la segunda coordenada β comprenden coordenadas de un vector, en el que el vector corresponde a una cadena de bits, en el que la cadena de bits comprende información integrada en el fotograma de vídeo individual.
10. Procedimiento según la reivindicación 9 y en el que la información (15) de marcado es reconstruida como resultado de la derivación del valor de una primera coordenada y una segunda coordenada.
11. Procedimiento según cualquiera de la reivindicación 9 o la reivindicación 11 y en el que un ID de usuario individual es reconocido como resultado de reconstruir la información (15) de marcado.
12. Un sistema de integración de marcas de agua, que comprende: un receptor de información de marcado; un vector de 2 coordenadas, denotado ω, en el que las 2 coordenadas se denotan, respectivamente, α, β, de
manera que ω = (α, β) , en el que el vector de 2 coordenadas representa la información (15) de marcado; un fotograma de vídeo a marcar, en el que el fotograma de vídeo comprende una pluralidad de píxeles, en el
que cada píxel de entre la pluralidad de píxeles está representado como p, en el que p = (x, y) , en el que x e y comprenden coordenadas de píxel p, en el que la pluralidad de píxeles están representados como una tríada de elementos de color, denotados,
respectivamente, R, G y B, y caracterizado por que el sistema comprende además: un marcador de fotogramas de vídeo operativo para marcar el fotograma de vídeo transformando cada píxel
entre la pluralidad de píxeles, tal como se indican a continuación: R’ (p) = R (p) + <p, ωR>; G’ (p) = G (p) + <p, ωG>; y B’ (p) = B (p) + <p, ωB>, en las que: ωR, ωG y ωB representan la información de marcado codificada como tres vectores de 2 coordenadas sobre la tríada de elementos de color R, G y B; <p, ωR> representa una operación de producto escalar sobre p y ωR; <p, ωG> representa una operación de producto escalar sobre p y ωG; y <p, ωB> representa una operación de producto escalar sobre p y ωB.
13. Un sistema de extracción de marcas de agua, que comprende:
una secuencia (60) de vídeo capturada que comprende datos integrados; y
un segmentador de secuencias de vídeo operativo para segmentar la secuencia (60) de vídeo capturada en una pluralidad de fotogramas de vídeo comprendidos en la misma; caracterizado por que el sistema comprende además:
un localizador de un primer centro de masa de color, operativo para localizar un primer centro de masa de color, en el que el primer centro de masa de color está denotado como C’, para cada elemento de color de cada fotograma de vídeo individual de entre la pluralidad de fotogramas de vídeo sumando los componentes de color según:
5
p representa cada píxel en un fotograma de vídeo; en el que el sistema comprende además:
un localizador de un segundo centro de masa de color, operativo para localizar el segundo centro de masa de color, en el que el segundo centro de masa de color está denotado como C, para cada elemento de color de un fotograma de vídeo individual correspondiente, en el que el fotograma de vídeo individual correspondiente corresponde a un fotograma de vídeo que no comprende datos integrados;
un procesador operativo para restar C de C’ para determinar una diferencia D, en la que en la que M representa uno de los elementos de color R, G o B; y p representa cada píxel en un fotograma de vídeo; en el que el sistema comprende además: un segundo procesador operativo para derivar, a partir de la diferencia D, un valor de una primera coordenada α y una segunda coordenada β, a partir de la ecuación aproximada en las que W representa la anchura de un fotograma en píxeles y H representa la altura del fotograma en píxeles, en el que:
la primera coordenada α y la segunda coordenada β comprenden coordenadas de un vector, en el que el vector corresponde a una cadena de bits, en el que la cadena de bits comprende información integrada en el fotograma de vídeo individual.
14. Una señal que comprende: una secuencia (60) de vídeo que comprende una pluralidad de fotogramas de vídeo, en el que cada una de entre la pluralidad de fotogramas de vídeo comprende una pluralidad de píxeles, en el que cada píxel de entre la pluralidad de píxeles está representado como p, en el que p = (x, y) , en el que x e y comprenden coordenadas de píxel p, en el que la pluralidad de píxeles están representados como una tríada de elementos de color, denotados,
respectivamente, como R, G y B, caracterizada por que la información (15) de marcado ha sido utilizada para transformar cada píxel de entre la pluralidad de píxeles, en la que la información (15) de marcado está representada como un vector de 2 coordenadas, denotado ω, en la que las 2 coordenadas se denotan, respectivamente, α, β, de manera que ω
= (α, β) , tal como se indica a continuación: R’ (p) = R (p) + <p, ωR>; G’ (p) = G (p) + <p, ωG>; y B’ (p) = B (p) + <p, ωB>, en las que: ωR, ωG y ωB representan la información (15) de marcado codificada como tres vectores de 2
coordenadas sobre la tríada de elementos de color R, G y B; <p, ωR> representa una operación de producto escalar sobre p y ωR; <p, ωG> representa una operación de producto escalar sobre p y ωG; y
<p, ωB> representa una operación de producto escalar sobre p y ωB.
15. Un medio de almacenamiento que comprende: una secuencia (60) de vídeo que comprende una pluralidad de fotogramas de vídeo, en el que cada uno de entre la pluralidad de fotogramas de vídeo comprende una pluralidad de píxeles, en el que cada píxel de entre la pluralidad de píxeles está representado como p, en el que p = (x, y) , en el que x e y comprenden coordenadas de píxel p, en el que la pluralidad de píxeles están representados como una tríada de elementos de color, denotados,
respectivamente, como R, G y B, caracterizado por que la información (15) de marcado ha sido utilizada para transformar cada píxel de entre la 10 pluralidad de píxeles, en el que la información (15) de marcado está representada como un vector de 2 coordenadas, denotado ω, en el que las 2 coordenadas se denotan, respectivamente, α, β, de manera que ω
= (α, β) , tal como se indica a continuación: R’ (p) = R (p) + <p, ωR>; G’ (p) = G (p) + <p, ωG>; y
B’ (p) = B (p) + <p, ωB>, en las que: ωR, ωG y ωB representan la información (15) de marcado codificada como tres vectores de 2
coordenadas sobre la tríada de elementos de color R, G y B; <p, ωR> representa una operación de producto escalar sobre p y ωR; 20 <p, ωG> representa una operación de producto escalar sobre p y ωG; y <p, ωB> representa una operación de producto escalar sobre p y ωB.
20 21 22 23 24 25 26 27
Patentes similares o relacionadas:
MÉTODO DE DETECCIÓN DE LÍNEAS DE TRANSMISIÓN DE ENERGÍA EN TIEMPO REAL CON VEHÍCULOS AÉREOS NO TRIPULADOS, del 25 de Junio de 2020, de PONTIFICIA UNIVERSIDAD JAVERIANA: La presente invención se refiere a un método para realizar la detección de líneas de transmisión de energía en una imagen capturada mediante una cámara […]
CONFIGURACIÓN Y VISUALIZACIÓN DE UNA INTERFAZ DE USUARIO CON ESTUDIOS DE ATENCIÓN SANITARIA, del 22 de Mayo de 2020, de FUJIFILM MEDICAL SYSTEMS USA INC: Configuración y visualización de una interfaz de usuario con estudios de atención sanitaria. Método y aparato para configurar y visualizar una interfaz de […]
Dispositivo y procedimiento de generación de imágenes de guía utilizando parámetros, del 13 de Mayo de 2020, de CJ CGV Co., Ltd: Un dispositivo de generación de imágenes de guía que comprende: una unidad de generación de imágenes de guía configurada para generar una imagen […]
Procedimiento y sistema para la calibración de un sistema de visión por ordenador, del 1 de Abril de 2020, de Oy Mapvision Ltd: Procedimiento para la calibración de un sistema de visión por ordenador tridimensional, comprendiendo dicho procedimiento las etapas de: disponer […]
Marcado remoto de pasaporte y documento de seguridad, del 29 de Enero de 2020, de SICPA HOLDING SA: Un sistema para marcar remotamente un documento de seguridad, tal como un pasaporte , con un correspondiente sello, etiqueta o visado virtual, que comprende: - una […]
Sistema y método de orientación automatizada para una máquina de movimientos coordinados, del 8 de Enero de 2020, de Recognition Robotics, Inc: Un método de orientación automatizada, que comprende: tomar una imagen inicial de una pluralidad de piezas de trabajo (Wa, Wb, Wc) de forma similar con una cámara […]
Imágenes en línea seguras, del 4 de Diciembre de 2019, de TELEFONAKTIEBOLAGET LM ERICSSON (PUBL): Un dispositivo de generación de imágenes seguras para proteger una imagen , comprendiendo el dispositivo de generación de imágenes seguras: un […]
 Método y aparato para comprobar neumáticos de rueda de vehículo, del 25 de Septiembre de 2019, de NEXION S.p.A: Un método para comprobar los neumáticos en las ruedas de un vehículo que comprende las etapas siguientes:
- cuando el vehículo está […]
Método y aparato para comprobar neumáticos de rueda de vehículo, del 25 de Septiembre de 2019, de NEXION S.p.A: Un método para comprobar los neumáticos en las ruedas de un vehículo que comprende las etapas siguientes:
- cuando el vehículo está […]