Sistema y método de orientación automatizada para una máquina de movimientos coordinados.
Un método de orientación automatizada, que comprende:
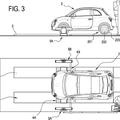
tomar una imagen inicial de una pluralidad de piezas de trabajo (Wa,
Wb, Wc) de forma similar con una cámara (16) montada en un componente móvil (18) de una máquina de movimiento coordinado (10);
reconocer visualmente las piezas de trabajo (Wa, Wb, Wc) individuales, entre la pluralidad de piezas de trabajo (Wa, Wb, Wc) de forma similar, utilizando un programa que se ejecuta en un procesador (42) en comunicación con la cámara (16) y la máquina de movimiento coordinado (10), en donde el programa compara la imagen inicial con un modelo de enseñanza almacenado en una base de datos, en donde el modelo de enseñanza está basado en imágenes del modelo de enseñanza previamente captadas por la cámara (16) y las imágenes del modelo de enseñanza son de un objeto de forma y tamaño similares a una de la pluralidad de piezas de trabajo (Wa, Wb, Wc) de forma similar y cada imagen del modelo de enseñanza es asociada a una respectiva posición de la cámara (16) cuando se tomó la imagen del modelo de enseñanza particular;
determinar los ejes x, y, z de acuerdo con un sistema de coordenadas cartesianas y las rotaciones Rx, Ry, Rz sobre dichos ejes del componente móvil (18) con respecto a cada pieza de trabajo (Wa, Wb, Wc) reconocida, entre la pluralidad de piezas de trabajo (Wa, Wb, Wc) reconocidas; y
con las posiciones x, y, z, así como Rx, Ry, Rz del componente móvil (18) ahora conocidas, mover el componente móvil (18) de la máquina de movimiento coordinado para realizar un trabajo sobre la pieza de trabajo (Wa, Wb, Wc), caracterizado por que
las posiciones x, y, z, así como Rx, Ry, Rz del componente móvil (18) se determinan basándose únicamente en una comparación entre la imagen inicial y los datos de los modelos de enseñanza derivados de las imágenes del modelo de enseñanza tomadas por la cámara (16), sin el uso de un sensor tridimensional para determinar z, que es el desplazamiento del componente móvil (18) con respecto a la pieza de trabajo (Wa, Wb, Wc) reconocida.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E17154016.
Solicitante: Recognition Robotics, Inc.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 151 Innovation Drive Elyria, OH 44035 ESTADOS UNIDOS DE AMERICA.
Inventor/es: CRISTIANO,STEFANO, MELIKIAN,SIMON.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B25J9/16 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 9/00 Manipuladores de control programado. › Controles por programa (control total de una fábrica, es decir, control centralizado de varias máquinas, G05B 19/418).
- G06K9/32 FISICA. › G06 CALCULO; CONTEO. › G06K RECONOCIMIENTO DE DATOS; PRESENTACION DE DATOS; SOPORTES DE REGISTROS; MANIPULACION DE SOPORTES DE REGISTROS (impresión per se B41J). › G06K 9/00 Métodos o disposiciones para la lectura o el reconocimiento de caracteres impresos o escritos o el reconocimiento de formas, p. ej. de huellas dactilares (métodos y disposiciones para la lectura de grafos o para la conversión de patrones de parámetros mecánicos, p.e. la fuerza o la presencia, en señales eléctricas G06K 11/00; reconocimiento de la voz G10L 15/00). › Alimentación o centrado del captador de imagen o de la zona de imagen.
- G06N20/00 G06 […] › G06N SISTEMAS DE COMPUTADORES BASADOS EN MODELOS DE CALCULO ESPECIFICOS. › Aprendizaje automático.
- G06T1/00 G06 […] › G06T TRATAMIENTO O GENERACIÓN DE DATOS DE IMAGEN, EN GENERAL. › Tratamiento de datos de imagen, de aplicación general.
- H04N5/232 ELECTRICIDAD. › H04 TECNICA DE LAS COMUNICACIONES ELECTRICAS. › H04N TRANSMISION DE IMAGENES, p. ej. TELEVISION. › H04N 5/00 Detalles de los sistemas de televisión (Detalles de los dispositivos de análisis o sus combinaciones con la producción de la tensión de alimentación H04N 3/00). › Dispositivos para el control de las cámaras de televisión, p. ej. control a distancia (H04N 5/235 tiene prioridad).
PDF original: ES-2774521_T3.pdf
Patentes similares o relacionadas:
MÉTODO DE DETECCIÓN DE LÍNEAS DE TRANSMISIÓN DE ENERGÍA EN TIEMPO REAL CON VEHÍCULOS AÉREOS NO TRIPULADOS, del 25 de Junio de 2020, de PONTIFICIA UNIVERSIDAD JAVERIANA: La presente invención se refiere a un método para realizar la detección de líneas de transmisión de energía en una imagen capturada mediante una cámara […]
CONFIGURACIÓN Y VISUALIZACIÓN DE UNA INTERFAZ DE USUARIO CON ESTUDIOS DE ATENCIÓN SANITARIA, del 22 de Mayo de 2020, de FUJIFILM MEDICAL SYSTEMS USA INC: Configuración y visualización de una interfaz de usuario con estudios de atención sanitaria. Método y aparato para configurar y visualizar una interfaz de […]
Dispositivo y procedimiento de generación de imágenes de guía utilizando parámetros, del 13 de Mayo de 2020, de CJ CGV Co., Ltd: Un dispositivo de generación de imágenes de guía que comprende: una unidad de generación de imágenes de guía configurada para generar una imagen […]
Procedimiento y sistema para la calibración de un sistema de visión por ordenador, del 1 de Abril de 2020, de Oy Mapvision Ltd: Procedimiento para la calibración de un sistema de visión por ordenador tridimensional, comprendiendo dicho procedimiento las etapas de: disponer […]
Marcado remoto de pasaporte y documento de seguridad, del 29 de Enero de 2020, de SICPA HOLDING SA: Un sistema para marcar remotamente un documento de seguridad, tal como un pasaporte , con un correspondiente sello, etiqueta o visado virtual, que comprende: - una […]
Imágenes en línea seguras, del 4 de Diciembre de 2019, de TELEFONAKTIEBOLAGET LM ERICSSON (PUBL): Un dispositivo de generación de imágenes seguras para proteger una imagen , comprendiendo el dispositivo de generación de imágenes seguras: un […]
 Método y aparato para comprobar neumáticos de rueda de vehículo, del 25 de Septiembre de 2019, de NEXION S.p.A: Un método para comprobar los neumáticos en las ruedas de un vehículo que comprende las etapas siguientes:
- cuando el vehículo está […]
Método y aparato para comprobar neumáticos de rueda de vehículo, del 25 de Septiembre de 2019, de NEXION S.p.A: Un método para comprobar los neumáticos en las ruedas de un vehículo que comprende las etapas siguientes:
- cuando el vehículo está […]
ESTRUCTURA DE NODOS PARA REPRESENTAR OBJETOS TRIDIMENSIONALES USANDO IMÁGENES CON PROFUNDIDAD, del 13 de Febrero de 2012, de SAMSUNG ELECTRONICS CO., LTD.: Una estructura de nodos para representar un objeto tridimensional, comprendiendo la estructura de nodos: un campo de resoluciónoctárbol, en el […]