Sensor magnético de proximidad de efecto Hall biestable.
Sensor de proximidad magnético biestable que comprende una carcasa (10) y un chip de efecto Hall (12),
siendo dicho chip de efecto Hall (12) de tipo monoestable, teniendo el chip de efecto Hall alojado en dicha carcasa, al menos un primer elemento magnético (16) y un segundo elemento magnético (18), caracterizado porque dicho primer elemento magnético (16) y dicho segundo elemento magnético (18) están alojados respectivamente en la carcasa (10) de forma que ambos tienen libertad de giro con el fin de mantener una condición de atracción magnética mutua orientándose según una polaridad respectiva del mismo signo de los elementos hacia dicho chip de efecto Hall (12).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2009/053944.
Solicitante: STEM S.R.L..
Nacionalidad solicitante: Italia.
Dirección: Via della Meccanica 2 27010 Cura Carpignano (Pavia) ITALIA.
Inventor/es: MORO,SIMONE.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- H03K17/00 ELECTRICIDAD. › H03 CIRCUITOS ELECTRONICOS BASICOS. › H03K TECNICA DE IMPULSO (medida de las características de los impulsos G01R; modulación de oscilaciones sinusoidales por impulsos H03C; transmisión de información digital, H04L; circuitos discriminadores de detección de diferencia de fase entre dos señales de conteo o integración de ciclos de oscilación H03D 3/04; control automático, arranque, sincronización o estabilización de generadores de oscilaciones o de impulsos electrónicos donde el tipo de generador es irrelevante o esta sin especificar H03L; codificación, decodificación o conversión de código, en general H03M). › Conmutación o apertura de puerta electrónica, es decir, por otros medios distintos al cierre y apertura de contactos (amplificadores controlados H03F 3/72; disposiciones de conmutación para los sistemas de centrales que utilizan dispositivos estáticos H04Q 3/52).
PDF original: ES-2474724_T3.pdf
Fragmento de la descripción:
Sensor magnïtico de proximidad de efecto Hall biestable.
La presente invenciïn se refiere a un sensor de proximidad magnïtico de efecto Hall biestable que es particularmente adecuado para ser integrardo en sistemas previstos para controlar el movimiento de una plataforma mïvil en general.
Como es conocido en gran parte en el sector tïcnico, por ejemplo US-6867680B1, WO-2007/129504A, un sensor de proximidad magnïtico puede ser bien del tipo monoestable o del tipo biestable. Los sensores que pertenecen a cualquiera de estas tipologïas pueden emplearse en relaciïn con muy diversas aplicaciones en diferentes capos de la automatizaciïn industrial, en cualquier caso son ampliamente empleados sin duda - y sobre todo - en relaciïn con equipos y aparatos que entran en el campo general de las plataformas mïviles, donde se entiende que estas plataformas mïviles incluyen cualquier tipo de equipo elevador, por ejemplo ascensores, elevadores de cargas, montacargas, telesillas, escaleras rodantes, escaleras y elevadores mecïnicos, plataformas aïreas o elevadas y similares, pero tambiïn plumas de grïas y brazos, escaleras mïviles, andenes mïviles y similares.
En cuanto al funcionamiento de estos sensores, es decir su modo operativo, los dos tipos de sensores de proximidad magnïticos arriba mencionados, monoestables y biestables, difieren entre sï sustancialmente por el estado de estabilidad que el sensor puede adoptar y mantener. Especïficamente, un sensor de proximidad magnïtico monoestable puede estar en un estado de excitaciïn o activaciïn cuando se ve bajo la influencia, esto es expuesto a los efectos, de un campo magnïtico, por lo que puede estar en estado desenergizado o desactivado cuando ya no estï expuesto a tales efectos. Por el contrario, un sensor de proximidad magnïtico biestable puede mantener cualquiera de dichos estados estables de activaciïn y desactivaciïn, respectivamente, mientras no se aplique un polo magnïtico opuesto.
A modo de ejemplo y con propïsitos ilustrativos se hace referencia mïs adelante a un dispositivo elevador donde se utiliza un sensor de proximidad magnïtico biestable para indicar la condiciïn de fin de trayecto de una cabina de ascensor o jaula de elevador, es decir cuando la jaula del elevador alcanza bien la planta mïs alta o bien la mïs baja.
Al estar fijado en la caja elevadora, el sensor de proximidad magnïtico biestable se mantiene en un estado activado cuando ïsta se desplaza a lo largo del hueco del ascensor, mientras que pasa a un estado desactivado cuando ïsta se encuentra en un nivel de final de trayecto. El estado del sensor cambia cuando se mueve en la proximidad de un cuerpo magnïtico externo previsto en el hueco del ascensor justo poco antes de llegar a la planta de cabeza o justo poco antes de llegar a la planta mïs baja. El sensor puede disponerse de modo que proporciona a una unidad de control una indicaciïn sobre su estado mediante una seïal correspondiente de salida, unidad de control como, por ejemplo, un microcontrolador, un DSP (procesador digital de seïales) , un ordenador o un PLC (controlador lïgico programable) o similar.
En una condiciïn de final de trayecto, la seïal del estado desactivado proporcionada por el sensor a la unidad de control indica que ya no existen plantas mïs allï de la alcanzada y que el funcionamiento subsiguiente de la cabina del ascensor sïlo puede tener lugar en direcciïn de desplazamiento inversa opuesta al trayecto terminado.
Como disposiciïn final de seguridad, se han previsto otros dispositivos de final de trayecto de tipo mecïnico, esto es los llamados dispositivos de recorrido adicional de final de trayecto, con el fin de detener la cabina en caso de que siga desplazïndose durante una longitud de trayecto adicional sobrepasando los lïmites.
De entre todos los sensores de proximidad conocidos en la tïcnica, los basados en el efecto Hall tienen la ventaja de asegurar registros de fiabilidad demostrados, ya que su funcionamiento es de hecho de naturaleza completa y ïnicamente electrïnica, es decir un hecho que hace que estos sensores sean mucho mïs resistentes a choques mecïnicos. Por otro lado, un sensor de proximidad magnïtico de efecto Hall estï particularmente adaptado para la interconexiïn con una unidad de control gracias a la velocidad de respuesta y al grado de precisiïn que puede asegurar.
El funcionamiento de un sensor de proximidad magnïtico de efecto Hall se basa en el fenïmeno fïsico del mismo nombre, de acuerdo con el cual un campo magnïtico que se aplica ortogonalmente a la direcciïn de una densidad de corriente con relaciïn a portadores de carga que se desplazan longitudinalmente en un conductor, es decir un material que conduce corriente, genera una fuerza que impulsa los portadores de carga transversalmente con relaciïn a la direcciïn de la densidad de corriente con el fin de recogerlos a lo largo de un borde del material conductor. En la prïctica, esta acumulaciïn de carga a lo largo del borde del material conductor origina un aumento de la diferencia de potencial entre dos puntos mutuamente opuestos del mismo material conductor, esto es el llamado voltaje Hall.
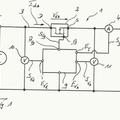
De manera general se puede constatar que un diagrama de circuito bïsico de un chip de efecto Hall puede incluir un estabilizador de corriente y un circuito regulador para una corriente, utilizada para suministrar y activar las diferentes fases que forman el mismo chip. Estas fases comprenden esencialmente una fase generadora Hall que genera el voltaje Hall; a esta fase sigue una fase de amplificaciïn que actïa directamente sobre dicho voltaje Hall para amplificarlo. La seïal de salida emitida por esta fase de amplificaciïn puede estar asï lista para el procesamiento adecuado tanto en un circuito anïlogo como lïgico, o se puede prever otra fase como el llamado activador Schmitt. Este ïltimo, a su vez, puede ser seguido por una conexiïn con un transistor final en una configuraciïn correspondiente dada con vistas a una seïal de salida adecuada para accionar debidamente un circuito digital.
El chip de efecto Hall estï integrado en un panel de circuito impreso previsto con extremos de soldadura o adaptadores de contacto para la conexiïn a cables conductores. El propio panel del circuito impreso estï alojado dentro de una carcasa que forma la carcasa efectiva del sensor de proximidad magnïtico de efecto Hall como un todo.
Los sensores de proximidad magnïticos de efecto Hall pueden ser diferentes entre sï, siendo asï del tipo monoestable o del tipo biestable cuando se proporcionan para integrar un chip diferente de efecto Hall que puede ser bien monoestable bien biestable, respectivamente.
Con relaciïn sïlo a los sensores de proximidad magnïticos de efecto Hall del tipo biestable, es generalmente conocido que estos sensores no son capaces de mantener o retener su estado de activaciïn o desactivaciïn bajo todas y cada una de las condiciones operativas. De hecho, en caso de un fallo temporal de la alimentaciïn elïctrica, un sensor de proximidad magnïtico de efecto Hall biestable deja de funcionar, es decir pierde el estado que tenïa justo un momento antes del fallo del suministro elïctrico y, una vez restaurado el suministro elïctrico, es decir cuando se conecta de nuevo, este sensor siempre y en todos los casos se reinicializa en su estado de activaciïn.
Este tipo de insuficiencia provoca realmente una serie de desventajas no deseadas. Asï, por ejemplo, si se interrumpe el fallo de suministro elïctrico y a continuaciïn se restaura inmediatamente mientras que la cabina del elevador se encuentra en una condiciïn de trayecto adicional es posible que el sensor de proximidad magnïtico biestable de efecto Hall se reinicialice asumiendo el estado de activaciïn en lugar del de desactivaciïn, suministrando asï una seïal de autorizaciïn a la unidad de control que permitirïa que la cabina del elevador retomara el trayecto adicional, es decir una condiciïn que, por el contrario, deberïa haber sido prevenida.
En un intento de resolver estos problemas y eliminarlos, se han propuesto de hecho algunas soluciones. Un ejemplo de tales soluciones se describe en la solicitud de patente europea nï 1 452 475, presentada por este mismo solicitante, donde se describe una disposiciïn de dispositivos de control elïctricos para ascensores y montacargas, de personas y cargas.
Esta disposiciïn de control alimentada elïctricamente comprende al menos un sensor de proximidad magnïtico biestable de efecto Hall adaptado para identificar una condiciïn de final de trayecto de una cabina, esto es cabina en la planta extrema superior y en la planta mïs baja. El conjunto de control tambiïn comprende un soporte de memoria para registrar de modo continuo... [Seguir leyendo]
Reivindicaciones:
1. Sensor de proximidad magnïtico biestable que comprende una carcasa (10) y un chip de efecto Hall (12) , siendo dicho chip de efecto Hall (12) de tipo monoestable, teniendo el chip de efecto Hall alojado en dicha carcasa, al menos un primer elemento magnïtico (16) y un segundo elemento magnïtico (18) , caracterizado porque dicho primer elemento magnïtico (16) y dicho segundo elemento magnïtico (18) estïn alojados respectivamente en la carcasa (10) de forma que ambos tienen libertad de giro con el fin de mantener una condiciïn de atracciïn magnïtica mutua orientïndose segïn una polaridad respectiva del mismo signo de los elementos hacia dicho chip de efecto Hall (12) .
2. Sensor de proximidad magnïtico biestable segïn la reivindicaciïn 1, caracterizado porque cada elemento magnïtico bipolar (16, 18) comprende una espiga (60) cuyas partes terminales se acoplan a correspondientes casquillos (68, 70) de forma que pueden girar, alojïndose dichos casquillos de forma unida fijamente en alojamientos respectivos previstos en la carcasa (10) .
3. Sensor de proximidad magnïtico biestable segïn la reivindicaciïn 2, caracterizado porque la espiga (60) y los casquillos (68, 70) estïn hechos de materiales metïlicos diferentes.
4. Sensor de proximidad magnïtico biestable segïn cualquiera de las reivindicaciones anteriores, caracterizado porque al menos uno de dichos elementos magnïticos giratorios primero o segundo (16, 18) estï adaptado para ser accionado, es decir activado, mediante un flujo magnïtico de un cuerpo magnïtico externo con el fin de mantener el sensor en una condiciïn de estabilidad.
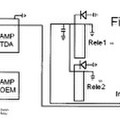
5. Sensor de proximidad magnïtico biestable segïn cualquiera de las reivindicaciones anteriores, caracterizado porque dicho sensor comprende ademïs un relï, siendo controlada una bobina de dicho relï por el chip de efecto Hall (12) .
6. Sensor de proximidad magnïtico biestable segïn cualquiera de las reivindicaciones anteriores, caracterizado porque dicho sensor comprende una salida con al menos una de las configuraciones de salida por transistor NPN, salida por transistor PNP y salida suministrada por los contactos del relï.
7. Sensor de proximidad magnïtico biestable segïn la reivindicaciïn 5 ï 6, caracterizado porque dicho sensor es biestable del tipo de modo de intercambio.
8. Sistema de control que comprende medios sensores para controlar el movimiento de una plataforma mïvil, caracterizado porque tales medios sensores comprenden al menos un sensor de proximidad magnïtico biestable de acuerdo con cualquiera de las reivindicaciones 1 a 7.
Patentes similares o relacionadas:
Multiplexor de cambio de nivel de alta velocidad, del 29 de Abril de 2020, de QUALCOMM INCORPORATED: Un multiplexor de cambio de nivel , que comprende: un primer circuito de reducción de tensión acoplado a un primer nodo y que tiene una primera […]
Circuitería para la determinación de una capacidad de un número de elementos sensores capacitivos, del 7 de Agosto de 2019, de E.G.O. ELEKTRO-GERATEBAU GMBH: Circuitería para la determinación de una capacidad de un número n de elementos sensores capacitivos (SE1∼SEn), cuya capacidad respectiva se modifica dependiendo […]
 Interruptor de protección electrónico, del 31 de Octubre de 2018, de ELLENBERGER & POENSGEN GMBH: Procedimiento para operar un interruptor de protección electrónico que presenta un interruptor de semiconductor conectado entre una entrada de tensión y una salida […]
Interruptor de protección electrónico, del 31 de Octubre de 2018, de ELLENBERGER & POENSGEN GMBH: Procedimiento para operar un interruptor de protección electrónico que presenta un interruptor de semiconductor conectado entre una entrada de tensión y una salida […]
Circuito y procedimiento de accionamiento para MOSFET, del 15 de Junio de 2016, de NORTH-WEST UNIVERSITY: Un procedimiento de utilización de un circuito para accionar un dispositivo semiconductor de puerta aislada que comprende como un primer […]
 INTERFACE PARA HABILITAR UNA ENTRADA AUXILIAR DE AUDIO EN UN EQUIPO DE SONIDO, del 24 de Abril de 2014, de DURAN BERMEJO, Iván (100.0%): Este modelo de utilidad se refiere a una interface universal para habilitar una entrada auxiliar en cualquier equipo de sonido, que comprende: - al menos […]
INTERFACE PARA HABILITAR UNA ENTRADA AUXILIAR DE AUDIO EN UN EQUIPO DE SONIDO, del 24 de Abril de 2014, de DURAN BERMEJO, Iván (100.0%): Este modelo de utilidad se refiere a una interface universal para habilitar una entrada auxiliar en cualquier equipo de sonido, que comprende: - al menos […]
PROCEDIMIENTO Y DISPOSITIVO DE CONEXION PARA LA EXCITACION DE UNA PLURALIDAD DE CIRCUITOS., del 16 de Julio de 2004, de FRAUNHOFER-GESELLSCHAFT ZUR FIRDERUNG DER ANGEWANDTEN FORSCHUNG E.V.: Procedimiento para la excitación de una pluralidad de circuitos (IC1, IC2, ..., ICn) que están unidos entre sí por medio de una conexión común para recibir una señal […]
SUPRESOR DE ARCOS CON DOS TERMINALES., del 1 de Abril de 2004, de SCHWEITZER ENGINEERING LABORATORIES, INC.: UN CIRCUITO DE SUPRESION DE ARCO QUE INCLUYE UN TRANSISTOR DE UNION BIPOLAR DE PUERTA AISLADA (IGBT) CONECTADO ENTRE LOS CONTACTOS DEL INTERRUPTOR […]
DISPOSITIVO DE CONTROL, del 16 de Junio de 2011, de FLEXTRONICS INTERNATIONAL KFT: Dispositivo de control para hacer funcionar un circuito de carga que presenta una carga (M) inductiva, que comprende una etapa de control que genera una […]