Una pantalla de guía de velocidad de aeronave.
Un método de visualización de información de vuelo en relación con una trayectoria de vuelo predeterminada que especifica las localizaciones y los tiempos programados correspondientes a las mismas,
comprendiendo el método las etapas de:
monitorizar una localización actual de una aeronave a lo largo de la trayectoria de vuelo predeterminada;
determinar un tiempo actual en el que la aeronave está en la localización actual;
proporcionar un tiempo programado para que la aeronave esté en la localización actual;
calcular una desviación (310) de tiempo entre el tiempo actual y el tiempo programado; y
visualizar la desviación (310) de tiempo,
caracterizado por:
proporcionar una velocidad respecto al suelo deseada para la aeronave en la localización actual;
monitorizar una velocidad respecto al suelo actual de la aeronave;
calcular una desviación (320) de velocidad respecto al suelo entre la velocidad respecto al suelo actual y la velocidad respecto al suelo deseada;
visualizar la desviación (320) de velocidad respecto al suelo;
monitorizar la velocidad aérea actual, el rumbo actual y la derrota actual de la aeronave;
definir una velocidad aérea operativa máxima para la aeronave;
calcular una desviación (322) de velocidad respecto al suelo máxima admisible en base a la velocidad operativa máxima definida, la velocidad aérea actual, la velocidad respecto al suelo actual, el rumbo actual y la derrota actual; y
visualizar la desviación (322) de velocidad respecto al suelo máxima admisible.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E11380074.
Solicitante: THE BOEING COMPANY.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 100 NORTH RIVERSIDE PLAZA CHICAGO, IL 60606-2016 ESTADOS UNIDOS DE AMERICA.
Inventor/es: FUCKE,LARS.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01C23/00 FISICA. › G01 METROLOGIA; ENSAYOS. › G01C MEDIDA DE DISTANCIAS, NIVELES O RUMBOS; TOPOGRAFIA; NAVEGACION; INSTRUMENTOS GIROSCOPICOS; FOTOGRAMETRIA O VIDEOGRAMETRIA (medida del nivel de líquidos G01F; radio navegación, determinación de la distancia o velocidad mediante la utilización de efectos de propagación, p. ej. efecto Doppler, tiempo de propagación, de ondas de radio, disposiciones análogas que utilicen otras ondas G01S). › Instrumentos combinados que indican más de un valor de navegación, p. ej. para aeronaves; Dispositivos de medida combinados para la medida de dos o más variables de movimiento, p. ej. distancia, velocidad, aceleración.
- G08G5/00 G […] › G08 SEÑALIZACION. › G08G SISTEMAS DE CONTROL DE TRÁFICO (control de tráfico ferroviario, seguridad del tráfico ferroviario B61L; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para el control del tráfico G01S 13/91, G01S 15/88, G01S 17/88; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para anticolisión G01S 13/93, G01S 15/93, G01S 17/93; control de posición, rumbo, altitud o actitud de vehículos terrestres, de agua, el aire o el espacio, no es específico para un entorno de tráfico G05D 1/00). › Sistemas del control del tráfico aéreo.
PDF original: ES-2531419_T3.pdf
Fragmento de la descripción:
Una pantalla de guía de velocidad de aeronave
La presente invención se refiere a sistemas y métodos para visualizar información de vuelo representativa de una desviación con respecto a una trayectoria de vuelo en cuatro dimensiones especificada. En particular, pero no exclusivamente, la Invención se refiere a una pantalla de cabina para permitir que los pilotos lleguen a una localización específica en un momento específico y para lograr los cambios necesarios en la velocidad de la aeronave para lograr una velocidad respecto al suelo preferida.
Habitualmente, las trayectorias de vuelo se calculan en tres dimensiones, es decir, longitud, latitud y altitud. Se espera que los futuros sistemas de control del tráfico aéreo especifiquen una dimensión adicional en las trayectorias de vuelo, en concreto, el tiempo. En otras palabras, tales sistemas de control del tráfico aéreo no solo proporcionarán una trayectoria que una aeronave debe seguir, sino que también especificarán el momento en el que una aeronave debe estar en cada posición a lo largo de la trayectoria. Esto permitirá que el control del tráfico aéreo atenúe el requisito de la separación entre aeronaves y permita de este modo un uso más eficiente del espacio aéreo.
Las pantallas de cabina convencionales solo visualizan la velocidad aérea absoluta, un objetivo para la velocidad aérea absoluta, y una flecha de tendencia de la velocidad aérea. Esta última indica la velocidad prevista de la aeronave después de un período de tiempo fijo (habitualmente, de seis a diez segundos) en función de la tasa actual de cambio de la velocidad aérea. Tales pantallas de cabina son adecuadas para los sistemas de control del tráfico aéreo usados actualmente, que pueden especificar órdenes de velocidad absoluta en forma de velocidades aéreas objetivo. Sin embargo, no proporcionan a la tripulación de vuelo información que sea directamente relevante para la tarea de seguir con precisión una trayectoria de vuelo en cuatro dimensiones.
Las mediciones de velocidad aérea no son directamente comparables con los valores de velocidad respecto al suelo, ya que la velocidad aérea se mide en relación con el cuerpo de aire a través del que se desplaza la aeronave. Este cuerpo de aire puede moverse por sí mismo en relación con el suelo. El movimiento del cuerpo de aire se caracteriza por la velocidad del viento y la dirección del viento, cada unas de las cuales puede variar a lo largo del tiempo. Por lo tanto, la velocidad respecto al suelo es equivalente a la magnitud de la suma del vector que define la velocidad aérea de la aeronave y el vector que define la velocidad del viento. Habitualmente, en esta comparación no se tiene en cuenta la dirección vertical, ya que tiene un efecto insignificante. En vista de la naturaleza variable en el tiempo de la velocidad aérea en relación con la velocidad respecto al suelo, la visualización de la velocidad aérea no es adecuada para una tripulación de vuelo que trata de seguir con precisión una trayectoria de vuelo en cuatro dimensiones.
El documento US 5459666 divulga una pantalla provista de un indicador de tiempo que indica el porcentaje que el valor de tiempo actual está por encima o por debajo de los valores previstos para el avance actual en una misión.
El documento GB 1061386 divulga una pantalla con un puntero, en la que se aplica al puntero una señal que representa la diferencia entre una velocidad respecto al suelo programada y la velocidad respecto al suelo real medida diferenciando una señal de rango.
De acuerdo con un primer aspecto de la presente invención, se proporciona un método definido por la reivindicación
1.
De acuerdo con un segundo aspecto de la presente invención, se proporciona un método definido por la reivindicación 2.
De acuerdo con un tercer aspecto de la presente invención, se proporciona un sistema definido por la reivindicación 6.
De acuerdo con un cuarto aspecto de la presente invención, se proporciona un sistema definido por la reivindicación 7.
De acuerdo con una realización, un método visualiza información de vuelo en relación con una trayectoria de vuelo predeterminada. La trayectoria de vuelo predeterminada especifica las localizaciones y los tiempos programados correspondientes. El método incluye monitorizar una localización actual de una aeronave a lo largo de la trayectoria de vuelo predeterminada. El método incluye determinar un tiempo actual en el que la aeronave está en la localización actual. El método incluye proporcionar un tiempo programado para que la aeronave esté en la localización actual. El método incluye calcular una desviación de tiempo entre el tiempo actual y el tiempo programado. El método incluye visualizar la desviación de tiempo.
De acuerdo con una realización adicional, un sistema para visualizar información de vuelo incluye una memoria de almacenamiento de trayectoria de vuelo dispuesta para almacenar datos relativos a una trayectoria de vuelo predeterminada que especifica las localizaciones a lo largo de la trayectoria de vuelo y los tiempos programados
correspondientes. El sistema incluye una unidad de determinación de localización dispuesta para emitir como salida los datos de localización que definen una localización actual de una aeronave a lo largo de la trayectoria de vuelo predeterminada. El sistema incluye una unidad de temporlzador de salida dispuesta para emitir como salida los datos de tiempo que definen un tiempo actual en que la aeronave está en la localización actual. El sistema incluye un procesador dispuesto para recibir los datos de localización y los datos de tiempo, para determinar un tiempo programado a partir de los tiempos programados almacenados en la memoria de trayectoria de vuelo correspondiente a la localización actual, y para calcular una desviación de tiempo entre el tiempo actual y el tiempo programado. El sistema incluye una pantalla dispuesta para visualizar la desviación de tiempo.
Ventajosamente, tales métodos y sistemas pueden visualizar información de vuelo que es directamente representativa de una desviación con respecto a una trayectoria en cuatro dimensiones especificada de manera continua y en tiempo real, y por lo tanto puede permitir que una tripulación de vuelo modifique fácilmente la posición a lo largo de la derrota de una aeronave para seguir la trayectoria en cuatro dimensiones con mayor precisión.
Igualmente, estos métodos y sistemas pueden aplicarse a una trayectoria para la que no se especifica la altitud; es decir, en la que solo se especifica la latitud, la longitud, y el tiempo. En consecuencia, mientras que las realizaciones siguientes utilizan trayectorias en cuatro dimensiones, la Invención comprende la vlsuallzaclón de la desviación de tiempo con respecto a una trayectoria especificada en dos dimensiones (lateral). En otras palabras, las localizaciones especificadas a lo largo de la trayectoria de vuelo pueden expresarse o como posiciones tridimensionales, o como posiciones bidimensionales.
La memoria de almacenamiento de trayectoria de vuelo puede ser cualquier forma de memoria, incluyendo tanto una memoria volátil (por ejemplo, RAM) como una memoria no volátil (por ejemplo, un disco duro). Además, la memoria de almacenamiento de trayectoria de vuelo puede almacenar o toda la trayectoria de vuelo predeterminada, o una o más partes de la trayectoria de vuelo. En diversas realizaciones, los datos de trayectoria de vuelo pueden transmitirse a la aeronave en tiempo real para su almacenamiento en la memoria de almacenamiento de trayectoria de vuelo, en cuyo caso la memoria de almacenamiento de trayectoria de vuelo puede ser una simple memoria Intermedia.
Los datos de almacenamiento de trayectoria de vuelo pueden Incluir las velocidades respecto al suelo programadas correspondientes a las localizaciones a lo largo de la trayectoria de vuelo. Como alternativa, las velocidades respecto al suelo programadas pueden derivarse de los datos de trayectoria de vuelo relativos a los tiempos programados y las localizaciones a lo largo de la trayectoria de vuelo. Por ejemplo, la tasa de cambio de la localización tal como se determina por los tiempos programados puede calcularse y usarse como velocidades respecto al suelo programadas.
La unidad de determinación de localización puede estar a bordo de la aeronave o en tierra. En este último caso, la localización actual se transmitiría a la aeronave usando el medio de comunicación de datos adecuado.
Cuando el medio de determinación de localización está localizado en la aeronave, puede comprender un receptor GPS o algún otro dispositivo de poslclonamlento por radio. Si es necesario, la altitud de la aeronave puede determinarse usando dicho receptor... [Seguir leyendo]
Reivindicaciones:
1. Un método de visualización de información de vuelo en relación con una trayectoria de vuelo predeterminada que especifica las localizaciones y los tiempos programados correspondientes a las mismas, comprendiendo el método las etapas de:
monitorizar una localización actual de una aeronave a lo largo de la trayectoria de vuelo predeterminada;
determinar un tiempo actual en el que la aeronave está en la localización actual;
proporcionar un tiempo programado para que la aeronave esté en la localización actual;
calcular una desviación (310) de tiempo entre el tiempo actual y el tiempo programado; y
visualizar la desviación (310) de tiempo,
caracterizado por:
proporcionar una velocidad respecto al suelo deseada para la aeronave en la localización actual; monitorizar una velocidad respecto al suelo actual de la aeronave;
calcular una desviación (320) de velocidad respecto al suelo entre la velocidad respecto al suelo actual y la
velocidad respecto al suelo deseada;
visualizar la desviación (320) de velocidad respecto al suelo;
monitorizar la velocidad aérea actual, el rumbo actual y la derrota actual de la aeronave; definir una velocidad aérea operativa máxima para la aeronave;
calcular una desviación (322) de velocidad respecto al suelo máxima admisible en base a la velocidad operativa máxima definida, la velocidad aérea actual, la velocidad respecto al suelo actual, el rumbo actual y la derrota actual; y
visualizar la desviación (322) de velocidad respecto al suelo máxima admisible.
2. Un método de visualización de información de vuelo en relación con una trayectoria de vuelo predeterminada que especifica las localizaciones y los tiempos programados correspondientes a las mismas, comprendiendo el método las etapas de:
monitorizar una localización actual de una aeronave a lo largo de la trayectoria de vuelo predeterminada;
determinar un tiempo actual en el que la aeronave está en la localización actual;
proporcionar un tiempo programado para que la aeronave esté en la localización actual;
calcular una desviación (310) de tiempo entre el tiempo actual y el tiempo programado; y
visualizar la desviación (310) de tiempo,
caracterizado por:
proporcionar una velocidad respecto al suelo deseada para la aeronave en la localización actual; monitorizar una velocidad respecto al suelo actual de la aeronave;
calcular una desviación (320) de velocidad respecto al suelo entre la velocidad respecto al suelo actual y la
velocidad respecto al suelo deseada;
visualizar la desviación (320) de velocidad respecto al suelo;
monitorizar la velocidad aérea actual, el rumbo actual y la derrota actual de la aeronave; definir una velocidad aérea operativa mínima para la aeronave;
calcular una desviación (324) de velocidad respecto al suelo mínima admisible en base a la velocidad operativa mínima definida, la velocidad aérea actual, la velocidad respecto al suelo actual, el rumbo actual y la derrota actual; y
visualizar la desviación (324) de velocidad respecto al suelo mínima admisible.
3. Un método de acuerdo con la reivindicación 1 o la reivindicación 2, donde la velocidad respecto al suelo deseada es una velocidad respecto al suelo programada.
4. Un método de acuerdo con una cualquiera de las reivindicaciones 2 a 3, que comprende además la etapa de visualizar la velocidad respecto al suelo deseada.
5. Un método de acuerdo con la reivindicación 1, que comprende además las etapas de:
definir una velocidad aérea operativa mínima para la aeronave;
calcular una desviación (324) de velocidad respecto al suelo mínima admisible en base a la velocidad aérea de maniobra mínima definida, la velocidad aérea actual, la velocidad respecto al suelo actual, el rumbo actual y la derrota actual; y
visualizar la desviación (324) de velocidad respecto al suelo mínima admisible.
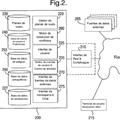
6. Un sistema para visualizar información de vuelo que comprende:
una memoria (210) de almacenamiento de trayectoria de vuelo dispuesta para almacenar los datos relativos a una trayectoria de vuelo predeterminada que especifica las localizaciones a lo largo de la trayectoria de vuelo y
los tiempos programados correspondientes a las mismas;
una unidad (220) de determinación de localización dispuesta para emitir como salida los datos de localización que definen una localización actual de una aeronave a lo largo de la trayectoria de vuelo predeterminada; una unidad (230) de temporizador dispuesta para emitir como salida los datos de tiempo que definen un tiempo actual en el que la aeronave está en la localización actual;
un procesador (200) dispuesto para recibir los datos de localización y los datos de tiempo, para determinar un tiempo programado a partir de los tiempos programados almacenados en la memoria de trayectoria de vuelo correspondiente a la localización actual, y para calcular una desviación (310) de tiempo entre el tiempo actual y el tiempo programado;
una pantalla (100) dispuesta para visualizar la desviación (310) de tiempo;
una unidad (240) de determinación de velocidad respecto al suelo dispuesta para emitir como salida los datos de velocidad respecto al suelo que definen una velocidad respecto al suelo actual medida de la aeronave, y los datos de derrota que definen una derrota medida de la aeronave; y
unos sensores (250) de aeronave dispuestos para emitir como salida los datos de velocidad aérea que definen una velocidad aérea actual medida de la aeronave, y los datos de rumbo que definen una velocidad aérea actual medida de la aeronave, caracterizado por que:
el sistema está dispuesto para proporcionar una velocidad respecto al suelo deseada;
el procesador (200) está dispuesto además para recibir los datos de velocidad respecto al suelo y para calcular un desviación (320) de velocidad respecto al suelo entre la velocidad respecto al suelo actual medida y la velocidad respecto al suelo deseada correspondiente a la localización actual;
la pantalla (100) está dispuesta además para visualizar la desviación (320) de velocidad respecto al suelo; la aeronave tiene una velocidad aérea operativa máxima definida;
el procesador (200) está dispuesto además para recibir los datos de velocidad aérea procedentes del sensor de velocidad aérea, los datos de velocidad respecto al suelo y los datos de derrota procedentes de la unidad de determinación de velocidad respecto al suelo, y los datos de rumbo procedentes del sensor de rumbo; el procesador (200) está dispuesto además para calcular una desviación (322) de velocidad respecto al suelo máxima admisible en base a la velocidad aérea operativa máxima definida, los datos de velocidad aérea, la datos de velocidad respecto al suelo, los datos de rumbo, y los datos de derrota; y
la pantalla (100) está dispuesta además para visualizar la desviación (322) de velocidad respecto al suelo máxima admisible.
7. Un sistema para visualizar información de vuelo que comprende:
una memoria (210) de almacenamiento de trayectoria de vuelo dispuesta para almacenar los datos relativos a una trayectoria de vuelo predeterminada que especifica las localizaciones a lo largo de la trayectoria de vuelo y los tiempos programados correspondientes a las mismas;
una unidad (220) de determinación de localización dispuesta para emitir como salida los datos de localización que definen una localización actual de una aeronave a lo largo de la trayectoria de vuelo predeterminada; una unidad (230) de temporizador dispuesta para emitir como salida los datos de tiempo que definen un tiempo actual en el que la aeronave está en la localización actual;
un procesador (200) dispuesto para recibir los datos de localización y los datos de tiempo, para determinar un tiempo programado a partir de los tiempos programados almacenados en la memoria de trayectoria de vuelo correspondiente a la localización actual, y para calcular una desviación de tiempo entre el tiempo actual y el tiempo programado;
una pantalla (100) dispuesta para visualizar la desviación (310) de tiempo;
una unidad (240) de determinación de velocidad respecto al suelo dispuesta para emitir como salida los datos de velocidad respecto al suelo que definen una velocidad respecto al suelo actual medida de la aeronave, y los datos de derrota que definen una derrota medida de la aeronave; y
unos sensores (250) de aeronave dispuestos para emitir como salida los datos de velocidad aérea que definen una velocidad aérea actual medida de la aeronave, y los datos de rumbo que definen una velocidad aérea actual medida de la aeronave,
caracterizado por que:
el sistema está dispuesto para proporcionar una velocidad respecto al suelo deseada;
el procesador (200) está dispuesto además para recibir los datos de velocidad respecto al suelo y para calcular un desviación (320) de velocidad respecto al suelo entre la velocidad respecto al suelo actual medida y la velocidad respecto al suelo deseada correspondiente a la localización actual;
la pantalla (100) está dispuesta además para visualizar la desviación (320) de velocidad respecto al suelo; la aeronave tiene una velocidad aérea operativa mínima definida;
el procesador (200) está dispuesto además para recibir los datos de velocidad aérea procedentes del sensor de velocidad aérea, los datos de velocidad respecto al suelo y los datos de derrota procedentes de la unidad de determinación de velocidad respecto al suelo, y los datos de rumbo procedentes del sensor de rumbo; el procesador (200) está dispuesto además para calcular una desviación (324) de velocidad respecto al suelo mínima admisible en base a la velocidad aérea operativa mínima definida, los datos de velocidad aérea, los
datos de velocidad respecto al suelo, los datos de rumbo, y los datos de derrota; y
la pantalla (100) está dispuesta además para visualizar la desviación (324) de velocidad respecto al suelo mínima admisible.
8. Un sistema de acuerdo con la reivindicación 6 o la reivindicación 7, donde:
la memoria (210) de almacenamiento de trayectoria de vuelo está dispuesta para almacenar las velocidades respecto al suelo programadas correspondientes a las localizaciones especificadas a lo largo de la trayectoria de vuelo; y
la velocidad respecto al suelo deseada es una velocidad respecto al suelo programada correspondiente a la localización actual.
9. Un sistema de acuerdo con la reivindicación 6 o la reivindicación 7, donde:
el procesador (100) está dispuesto además para calcular las velocidades respecto al suelo programadas correspondientes a las localizaciones especificadas a lo largo de la trayectoria de vuelo, en base a las localizaciones especificadas a lo largo de la trayectoria de vuelo y los tiempos programados correspondientes a las mismas; y
la velocidad respecto al suelo deseada es una velocidad respecto al suelo programada correspondiente a la localización actual.
10. Un sistema de acuerdo con una cualquiera de las reivindicaciones 6 a 9, donde la pantalla está dispuesta además para visualizar la velocidad respecto al suelo programada.
11. Un sistema de acuerdo con la reivindicación 6, donde:
la aeronave tiene una velocidad aérea de maniobra mínima definida;
el procesador (100) está dispuesto además para calcular una desviación (324) de velocidad respecto al suelo mínima admisible en base a la velocidad aérea de maniobra mínima definida, los datos de velocidad aérea, los datos de velocidad respecto al suelo, los datos de rumbo, y los datos de derrota; y
la pantalla está dispuesta además para visualizar la desviación (324) de velocidad respecto al suelo mínima admisible.
Patentes similares o relacionadas:
 Métodos y sistemas de programación de vuelo, del 29 de Julio de 2020, de BAE SYSTEMS PLC: Método, ejecutado por ordenador, de funcionamiento de un sistema electrónico de programación de vuelo para aeronave, en el que el sistema electrónico de programación […]
Métodos y sistemas de programación de vuelo, del 29 de Julio de 2020, de BAE SYSTEMS PLC: Método, ejecutado por ordenador, de funcionamiento de un sistema electrónico de programación de vuelo para aeronave, en el que el sistema electrónico de programación […]
Procedimiento y dispositivo de identificación de un avión en conexión con el estacionamiento del avión en un puesto de estacionamiento, del 3 de Junio de 2020, de thyssenkrupp Airport Solutions, S.A: Procedimiento de identificación de un avión e indicación del tipo y versión del avión en conexión con el estacionamiento del avión en una puerta […]
Métodos y aparatos para sistema de transporte aéreo distribuido, del 27 de Mayo de 2020, de Sunlight Aerospace Inc: Un método para el transporte aéreo distribuido, que comprende: la provisión de un vehículo de transporte aéreo con un ala y una envergadura, con capacidad para transportar […]
SISTEMA Y METODO DE CONTROL OPERATIVO DE UNA AERONAVE NO TRIPULADA, del 26 de Marzo de 2020, de ARBOREA INTELLBIRD S.L: esumenesumen esumen Sistema y método para el control operativo de una aeronave no tripulada, cuyo fin es imposibilitar el despegue de la aeronave si no se ha pedido […]
Sistema y procedimiento para la gestión de la actividad de aviones mediante la utilización de analítica de vídeo, del 19 de Febrero de 2020, de Airbus Group India Private Limited: Procedimiento para la gestión de la actividad en la zona de operaciones mediante la utilización de analítica de vídeo , que comprende: […]
Un método y sistema implementados por ordenador para generar una trayectoria 3D a una ubicación de aterrizaje para un vehículo aéreo, del 1 de Enero de 2020, de THE BOEING COMPANY: Un sistema para generar una trayectoria 3D a partir de un origen a un destino para un vehículo aéreo (AV), el sistema comprende: - una unidad de gestión […]
Un procedimiento para controlar las luces de advertencia de un vehículo aéreo no tripulado y un sistema para su aplicación, del 11 de Diciembre de 2019, de Aerobits Sp. z o.o: Un procedimiento para controlar las luces de advertencia de un vehículo aéreo no tripulado, en un sistema, en el que una o más luces de advertencia están […]
Sistema de seguimiento para aeronaves no tripuladas, del 4 de Diciembre de 2019, de Airbus Defence and Space GmbH: Sistema para navegación de avión, que comprende: un primer avión con una primera unidad de comunicación que comprende un radar ; […]