Módulo de envasado, máquina y método para la realización de al menos dos operaciones sobre envases flexibles.
Módulo (10) de envasado para la realización de al menos dos operaciones sobre envases (9) flexibles dispuestos en hilera,
siendo dichas operaciones posteriores a la conformación propia de dichos envases, tales como la apertura, el llenado y/o el cierre de dichos envases, que comprende:
- una cadena (5) de transmisión que describe una trayectoria cerrada
- unos medios de sujeción (7) para la suspensión de los envases flexibles a lo largo de todo su recorrido están unidos a dicha cadena de transmisión, donde cada medio de sujeción está asignado para la suspensión de un correspondiente envase flexible a lo largo de todo su recorrido, estando dichos medios de sujeción accionados por el movimiento relativo de la cadena con respecto de otro componente preferiblemente estático del módulo;
caracterizado por que el módulo de envasado
- comprende al menos dos ruedas operacionales (1, 2, 3, 4) giratorias de ejes verticales de las que al menos una está motorizada, estando provistas dichas ruedas operacionales de correspondientes medios para llevar a cabo las respectivas operaciones sobre los envases;
- la cadena (5) de transmisión está enlazada con las ruedas operacionales;
- el ángulo de contacto (α) de la cadena con las ruedas operacionales es superior a 180º;
- las ruedas operacionales (1, 2, 3, 4) giratorias son ruedas dentadas cuyos dientes (11) están dotados de muescas (12) en las que engranan o encajan correspondientes pasadores (51) que vinculan de forma articulada los eslabones 25 (52) consecutivos de la cadena (5), y donde el módulo de envasado (10) comprende al menos una rueda de desvío (8), dispuesta en el exterior de la trayectoria cerrada de la cadena (5) y enfrentada a un tramo de cadena entre dos ruedas operacionales (1, 2, 3, 4) adyacentes, estando dotados los dientes (81) de la al menos una rueda de desvío de muescas (82) en las que engranan o encajan correspondientes pasadores (51) que vinculan de forma articulada los eslabones (52) consecutivos de la cadena (5).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E11382096.
Solicitante: VOLPAK, S.A.U.
Nacionalidad solicitante: España.
Inventor/es: LEON GONZALEZ,Miguel Angel.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B65B43/46 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65B MAQUINAS, APARATOS, DISPOSITIVOS O PROCEDIMIENTOS DE EMBALAJE DE OBJETOS O MATERIALES; DESEMBALAJE (dispositivos para la colocación en paquetes y el prensado de puros A24C 1/44; dispositivos para tensar y fijar ataduras adaptadas para ser soportadas por el objeto u objetos a fijar B25B 25/00; colocación de cierres en botellas, tarros o recipientes análogos B67B 1/00 - B67B 6/00; limpieza, llenado y cierre simultáneo de botellas B67C 7/00; vaciado de botellas, jarras, latas, cubas, barriles o contenedores similares B67C 9/00). › B65B 43/00 Formación, alimentación, abertura o montaje de receptáculos o recipientes, en unión con el embalaje (formación de bolsas en las hojas, los elementos de envoltura o en las bandas, presionando el material en las matrices o desplazándolo sobre matrices de plegado B65B 47/00). › sirviéndose de zarpas.
- B65B43/52 B65B 43/00 […] › sirviéndose de vías de rodadura o de transportadores sin fin.
- B65B65/00 B65B […] › Partes constitutivas especiales de las máquinas de embalar, no previstos en otro lugar; Instalaciones de esas partes constitutivas.
PDF original: ES-2546133_T3.pdf
Fragmento de la descripción:
DESCRIPCION
Módulo de envasado, máquina y método para la realización de al menos dos operaciones sobre envases flexibles.
Sector técnico de la invención 5
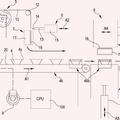
La presente invención se refiere a un módulo de envasado en el que al menos se realizan dos operaciones sobre envases flexibles dispuestos en hilera, siendo dichas operaciones las que se realizan con posterioridad a la conformación propia de los envases, tales como las operaciones de apertura, llenado y cierre de los envases. El módulo de envasado comprende al menos dos ruedas operacionales giratorias de ejes verticales de las que al menos una está motorizada. Dichas operacionales están provistas de correspondientes medios para llevar a cabo 10 las citadas operaciones sobre los envases. El módulo también comprende una cadena o correa de transmisión que enlaza con las ruedas operacionales describiendo una trayectoria cerrada.
Además del módulo de envasado, la invención también contempla una máquina envasadora horizontal y un método de envasado. 15
Antecedentes de la invención Existe una amplia variedad de máquinas automáticas destinadas al envasado en continuo de productos líquidos, como por ejemplo zumos y bebidas refrescantes, granulados, triturados o pulverulentos en envases flexibles en forma de bolsas. En general, las realizaciones conocidas de máquinas envasadoras automáticas están provistas de 20 un tren de conformación de bolsas de material termosoldable y de un tren para el llenado de las bolsas con el producto a envasar o tren de envasado, que enlaza con el anterior.
En el documento de patente ES2226518 se describe una máquina envasadora automática que comprende unos medios de conformación de bolsas o unos medios de suministro de bolsas preconfeccionadas, determinantes de un 25 eje longitudinal virtual, unos medios de transporte de bolsas para su envasado y unos medios de envasado de bolsas. Los medios de transporte de bolsas están enlazados con los de conformación de bolsas o con los de suministro de bolsas preconfeccionadas mediante un dispositivo de transferencia de bolsas. Los medios de transporte de bolsas comprenden una guía de transporte de bolsas que describe una trayectoria cerrada compuesta por una primera porción semicircunferencial y una segunda porción semicircunferencial mutuamente enfrentadas por 30 su cara interior y enlazadas por sus correspondientes extremos mediante porciones rectas, configurando un interior oblongo en el que quedan dispuestos medios de envasado de bolsas, siendo la guía de transporte determinante de un eje longitudinal virtual. Pese al ahorro de espacio que supone esta máquina en comparación con aquellas en las que el tren de conformación de bolsas y el tren de envasado están dispuestos longitudinalmente uno respecto del otro, sería deseable mejorar aún más la capacidad de envasado con respecto al espacio ocupado por el tren de 35 envasador.
Por su parte, las máquinas envasadoras horizontales habitualmente están provistas de un módulo de conformación de envases y de un módulo de envasado, que cooperan de manera que los envases fabricados en el módulo de conformación son transferidos individualmente o por lotes al módulo de envasado, en donde se llevan a cabo 40 operaciones tales como la apertura, el llenado y el cierre de dichos envases.
Los módulos de envasado conocidos hasta la fecha comprenden una serie de estaciones de trabajo alineadas longitudinalmente en donde se llevan a cabo, simultáneamente, las mencionadas operaciones de apertura, llenado y cierre. Para ello, los envases flexibles se disponen alineados longitudinalmente, separados unos de otros, conforme 45 a la distancia de separación de las estaciones de trabajo, formando un tren de envasado que avanza intermitentemente, desplazándose así los envases de una estación a la siguiente. Para ello, las máquinas están provistas de un carro de transporte que sujeta simultáneamente todos los envases flexibles del tren de envasado y los transporta, también simultáneamente, entre dos estaciones consecutivas.
A modo de ejemplo, el documento de patente ES2257180 describe un dispositivo de transporte de envases aplicable a máquinas de envasado automático, de las provistas de un tren de conformación de envases flexibles en forma de bolsas, a partir de una lámina de material termosoldable y de un tren de envasado en el que al menos el llenado y el cierre de envases se realiza en correspondientes estaciones en alineación longitudinal.
El inconveniente que presenta este tipo de disposición es que el movimiento de los envases o grupos de envases flexibles no es continuo sino intermitente. La velocidad de avance de los envases durante las distintas estaciones de envasado está muy limitada en comparación con la velocidad que se podría alcanzar, debido a que cuando los envases avanzan intermitentemente, el producto líquido, granular o pulverulento contenido en los mismos podría salirse antes de que el envase fuera cerrado, por el efecto ola que se produciría si la velocidad no estuviera 60 controlada.
También hay disposiciones en las que el movimiento de los envases es continuo, como la descrita en el documento DE4035815-A1, que corresponde a las características del preámbulo de la reivindicación 1.
Por otra parte, también existen máquinas de disposición no lineal en las que se llevan a cabo las operaciones de 65 envasado sobre los envases, como la que se describe en el documento EP1043233-A1. Este tipo de máquinas recuerda a las conocidas máquinas de envasado que trabajan con botellas rígidas que son sometidas, por ejemplo, a operaciones de llenado con líquido, introducción de gas en su interior y aplicación de un tapón en su embocadura, realizándose cada operación en respectivos dispositivos en forma de ruedas giratorias de eje vertical, dispuestos unos junto a otros, en los que el perímetro de las ruedas dispone de un número de alojamientos para recibir una botella en cada uno, transfiriéndose cada botella del alojamiento de una rueda a uno de los alojamientos de otra 5 rueda adyacente para realizar la siguiente operación de envasado.
Particularmente, en el documento EP1043233-A1 se describe una máquina para el llenado y envasado de envases flexibles en forma de bolsas. Como los envases son en forma de bolsa y flexibles, cada uno está colocado sobre un elemento de soporte rígido formado por una base y dos paredes verticales separadas por una distancia regulable 10 para que se adapte al ancho de la bolsa. El elemento de soporte rígido confiere a la bolsa la estabilidad y rigidez necesarias para realizar las operaciones sobre el envase. La máquina comprende unos medios de transporte de circulación sin fin sobre los que está colocada una pluralidad de elementos de soporte rígidos para sujetar las bolsas, unos medios de suministro de bolsas, unos medios de introducción de bolsas, unos medios de llenado de fluidos, unos medios de sellado de la bolsa y unos medios de extracción de la bolsa, que están dispuestos 15 secuencialmente sobre la pista de transporte de los elementos de soporte de circulación. Los medios para realizar las operaciones están montados en respectivos cuerpos rotativos aproximadamente dispuestos en la pista de transporte de los elementos de soporte.
Cada bolsa es movida desde el dispositivo de introducción de la bolsa hasta el dispositivo de llenado de fluido a través de 20 un miembro de interconexión provisto de espacios de alojamiento para el conjunto formado por el elemento de soporte rígido y una bolsa. Después de acabar la operación de llenado, la bolsa es movida desde el dispositivo de llenado de fluido al dispositivo de medios de sellado de la bolsa a través de un miembro de interconexión también provisto de espacios de alojamiento.
Este tipo de máquina, requiere disponer de un número elevado de elementos de apoyo para los envases flexibles, tantos como el número de envases en cada ciclo. Además, también se debe tener especial cuidado en controlar los desfases entre los distintos cuerpos giratorios y los cuerpos giratorios necesitan ser sincronizados. También, debe tenerse cuidado en que durante el intercambio de una rueda operacional a otra a través de los medios de interconexión, el conjunto elemento de apoyo-bolsa no experimente movimientos bruscos al abandonar un 30 alojamiento y pasar a otro, lo que obliga a tomar precauciones y dotar de medios específicos para que la transferencia se realice de forma suave.
Así pues, se pone de manifiesto la necesidad de un módulo de envasado aplicable a todo tipo de envases flexibles y productos, sin que sea necesario que estos envases vayan siempre apoyados sobre un elemento de apoyo para que 35 se puedan realizar las operaciones sobre los envases, que... [Seguir leyendo]
Reivindicaciones:
1. Módulo (10) de envasado para la realización de al menos dos operaciones sobre envases (9) flexibles dispuestos en hilera, siendo dichas operaciones posteriores a la conformación propia de dichos envases, tales como la apertura, el llenado y/o el cierre de dichos envases, que comprende: 5
- una cadena (5) de transmisión que describe una trayectoria cerrada
- unos medios de sujeción (7) para la suspensión de los envases flexibles a lo largo de todo su recorrido están unidos a dicha cadena de transmisión, donde cada medio de sujeción está asignado para la suspensión de un 10 correspondiente envase flexible a lo largo de todo su recorrido, estando dichos medios de sujeción accionados por el movimiento relativo de la cadena con respecto de otro componente preferiblemente estático del módulo;
caracterizado por que el módulo de envasado 15
- comprende al menos dos ruedas operacionales (1, 2, 3, 4) giratorias de ejes verticales de las que al menos una está motorizada, estando provistas dichas ruedas operacionales de correspondientes medios para llevar a cabo las respectivas operaciones sobre los envases;
- la cadena (5) de transmisión está enlazada con las ruedas operacionales; 20
- el ángulo de contacto () de la cadena con las ruedas operacionales es superior a 180º;
- las ruedas operacionales (1, 2, 3, 4) giratorias son ruedas dentadas cuyos dientes (11) están dotados de muescas (12) en las que engranan o encajan correspondientes pasadores (51) que vinculan de forma articulada los eslabones 25 (52) consecutivos de la cadena (5) , y donde el módulo de envasado (10) comprende al menos una rueda de desvío (8) , dispuesta en el exterior de la trayectoria cerrada de la cadena (5) y enfrentada a un tramo de cadena entre dos ruedas operacionales (1, 2, 3, 4) adyacentes, estando dotados los dientes (81) de la al menos una rueda de desvío de muescas (82) en las que engranan o encajan correspondientes pasadores (51) que vinculan de forma articulada los eslabones (52) consecutivos de la cadena (5) . 30
2. Módulo (10) de envasado según la reivindicación 2, caracterizado porque los dientes (11) de las ruedas operacionales (1, 2, 3, 4) son intercambiables y fabricados en un material no metálico.
3. Módulo (10) de envasado según una cualquiera de las reivindicaciones anteriores, caracterizado porque 35 comprende al menos una rueda de desvío (8) , dispuesta en el exterior de la trayectoria cerrada de la cadena (5) y enfrentada a un tramo de cadena entre dos ruedas operacionales (1, 2, 3, 4) adyacentes de tal modo que cuando la cadena abandona una rueda operacional inmediatamente enlaza con la rueda de desvío determinándose en la trayectoria de la cadena un punto de inflexión (6) al cambiar de sentido su curvatura.
4. Módulo (10) de envasado según una cualquiera de las reivindicaciones anteriores, caracterizado porque comprende al menos una rueda de desvío (8) , dispuesta en el exterior de la trayectoria cerrada de la cadena (5) y enfrentada a un tramo de cadena entre dos ruedas operacionales (1, 2, 3, 4) adyacentes de tal modo que cuando la cadena abandona la rueda de desvío inmediatamente enlaza con una rueda operacional determinándose en la trayectoria de la cadena un punto de inflexión (6) al cambiar de sentido su curvatura. 45
5. Módulo (10) de envasado según una cualquiera de las reivindicaciones 3 a 4, caracterizado porque comprende tantas ruedas de desvío (8) como ruedas operacionales (1, 2, 3, 4) y porque entre cada dos ruedas operacionales adyacentes está dispuesta una rueda de desvío en el exterior de la trayectoria cerrada de la cadena (5) , de tal modo que cuando la cadena abandona una rueda operacional, inmediatamente enlaza con una rueda de desvío y cuando 50 la cadena abandona dicha rueda de desvío inmediatamente enlaza con la rueda operacional adyacente a la primera, determinándose en la trayectoria de la cadena respectivos puntos de inflexión (6) .
6. Módulo (10) de envasado según una cualquiera de las reivindicaciones anteriores, caracterizado porque todas las ruedas operacionales (1, 2, 3, 4) están dispuestas en el interior de la trayectoria cerrada de la cadena (5) . 55
7. Módulo (10) de envasado según una cualquiera de las reivindicaciones anteriores, caracterizado porque al menos dos ruedas operacionales (1, 2, 3, 4) tienen diámetros distintos.
8. Módulo (10) de envasado según una cualquiera de las reivindicaciones anteriores, caracterizado porque el 60 ángulo de contacto () de la cadena (5) con las ruedas operacionales (1, 2, 3, 4) es superior a 260º.
9. Módulo (10) de envasado según una cualquiera de las reivindicaciones anteriores, caracterizado porque cada medio de sujeción (7) para la suspensión de un envase (9) flexible comprende unas pinzas (71) accionadas por un respectivo palpador (72) dispuesto en la cadena (5) y que sigue una trayectoria determinada por una superficie de 65 leva (75) fija al componente del módulo, preferiblemente estático, , de modo que la distancia de separación entre los extremos de las pinzas es regulable en función del punto de la trayectoria determinada por la superficie de leva en la que se encuentre el palpador.
10. Máquina envasadora horizontal (100) provista de un módulo de conformación (20) de envases y de un módulo (10) de envasado, que cooperan de modo que los envases (9) fabricados en el módulo de conformación son 5 transferidos al modulo de envasado donde se llevan a cabo las operaciones de apertura, llenado y/o cierre de los envases, caracterizada porque el módulo de envasado es el definido en una cualquiera de las reivindicaciones 1 a 10.
11. Método de envasado que comprende la realización de al menos dos operaciones sobre envases (9) flexibles 10 conformados dispuestos en hilera, tales como la apertura, el llenado y/o el cierre de dichos envases, caracterizado porque comprende las siguientes etapas:
a) sujeción individual por suspensión de cada uno de los envases conformados a un correspondiente medio de sujeción (7) unido a una cadena (5) o correa de transmisión de trayectoria cerrada que a su vez avanza de modo 15 continuo enlazada con al menos dos ruedas operacionales (1, 2, 3, 4) giratorias de ejes verticales de la que al menos una está motorizada, siendo el ángulo de contacto () de la cadena con las ruedas operacionales superior a 180º, donde las ruedas operacionales (1, 2, 3, 4) giratorias son ruedas dentadas cuyos dientes (11) están dotados de muescas (12) en las que engranan o encajan correspondientes pasadores (51) que vinculan de forma articulada los eslabones (52) consecutivos de la cadena (5) , y donde hay al menos una rueda de desvío (8) , dispuesta en el 20 exterior de la trayectoria cerrada de la cadena (5) y enfrentada a un tramo de cadena entre dos ruedas operacionales (1, 2, 3, 4) adyacentes, estando dotados los dientes (81) de la al menos una rueda de desvío de muescas (82) en las que engranan o encajan correspondientes pasadores (51) que vinculan de forma articulada los eslabones (52) consecutivos de la cadena (5) ;
b) transporte de cada envase arrastrado por la cadena hasta llegar a un primer punto de contacto de la cadena con la primera rueda operacional,
c) transporte de cada envase a lo largo de más de la mitad del perímetro de la primera rueda operacional, sometiendo a la vez cada envase a la acción de los medios que llevan a cabo la primera operación provistos en la 30 primera rueda operacional,
d) transporte de cada envase arrastrado por la cadena hasta alcanzar un punto en el que la cadena se desprende de la primera rueda operacional, 35
e) transporte de cada envase arrastrado por la cadena hasta llegar a un primer punto de contacto de la cadena con la segunda rueda operacional, en donde la cadena ha sido enlazada a una rueda de desvío entre el punto de liberación de la primera rueda operación y el primer punto de contacto con la segunda rueda operacional,
f) transporte de cada envase a lo largo de más de la mitad del perímetro de la segunda rueda operacional, 40 sometiendo a la vez cada envase a la acción de los medios que llevan a cabo la segunda operación provistos en la segunda rueda operacional,
g) transporte de cada envase arrastrado por la cadena hasta alcanzar un punto en el que la cadena se desprende de la segunda rueda operacional, 45
h) liberación individual de cada envase por parte de su respectivo medio de sujeción.
Patentes similares o relacionadas:
Aparato de transporte de artículos, del 15 de Abril de 2020, de TOYO JIDOKI CO., LTD.: Aparato de transporte de artículos que comprende: una pista anular que tiene un par de partes paralelas, un mecanismo de transporte giratorio […]
Máquina de llenado para bolsas con aberturas, del 19 de Febrero de 2020, de Ing. A. Rossi Impianti Industriali - Societa' a Responsabilita' Limitata: Una máquina de llenado para bolsas (S) con una abertura (B), que comprende: - un cabezal dispensador con un producto que ha […]
Máquina para envasar bolsas para alimentos, del 11 de Diciembre de 2019, de ALTOPACK S.P.A.: Máquina para envasar una pluralidad de bolsas para alimentos, comprendiendo dicha máquina medios para producir bolsas de plástico […]
Procedimiento para el llenado de envases con productos que van cambiando en una máquina llenadora, del 4 de Diciembre de 2019, de SIG TECHNOLOGY AG: Procedimiento para el llenado de envases con productos que van cambiando en una máquina llenadora , en el que los envases se forman a partir de […]
Dispositivo y procedimiento de muestreo de un líquido, del 13 de Noviembre de 2019, de Henry, Grégoire: Dispositivo de muestreo de un líquido sensible al contacto con el aire, que permite transvasar este líquido , previamente contenido en un recipiente inicial […]
Procedimiento para envasar un producto lácteo altamente texturizado, del 21 de Agosto de 2019, de COMPAGNIE GERVAIS-DANONE: Procedimiento para llenar un recipiente con un producto lácteo que presenta una viscosidad comprendida entre 1400 y 3800 mPa.s medida por un viscosímetro equipado con un […]
MÁQUINA ENCAJADORA DE ENVASES VERTICALMENTE INESTABLES Y PROCEDIMIENTO DE ENCAJADO DE ENVASES VERTICALMENTE INESTABLES, del 8 de Agosto de 2019, de TAVIL IND S.A.U: La presente invención se refiere a una máquina encajadora de envases verticalmente inestables que comprende unos medios de transporte de los […]
 Aparato y procedimiento para envasar un producto, del 31 de Julio de 2019, de Cryovac, LLC: Un aparato para envasar un producto (P) dispuesto en una bandeja ,
comprendiendo dicho aparato un conjunto de envasado configurado para fijar […]
Aparato y procedimiento para envasar un producto, del 31 de Julio de 2019, de Cryovac, LLC: Un aparato para envasar un producto (P) dispuesto en una bandeja ,
comprendiendo dicho aparato un conjunto de envasado configurado para fijar […]