MÉTODO Y APARATO PARA OBTENER LA POSICIÓN REAL DE UNA CARGA DISPUESTA SOBRE UNA ESTANTERÍA DE UN ALMACÉN.
Método y aparato para obtener la posición real de una carga dispuesta sobre una estantería de un almacén,
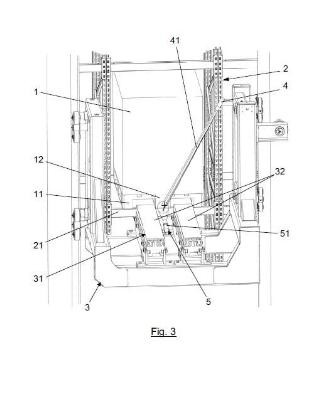
donde dicho almacén comprende un sistema de gestión de almacenaje configurado para controlar un transelevador (3), previo posicionamiento del mismo frente a la posición teórica de un punto de referencia (P) de la carga (1). Comprendiendo un emisor láser (4) configurado para proyectar un haz de luz (41) sobre una primera superficie (S1) de la carga (1) y sobre una segunda superficie (S2) de la estantería (2), donde dicho haz de luz (41) genera un patrón con una forma geométrica al menos unidimensional, obteniendo una primera y una segunda imagen (I, I'); y medios de visión artificial (5) configurados para capturar las imágenes (I, I') y para determinar el desplazamiento del punto de referencia (P) a partir de dichas imágenes (I, I') para conocer la posición real de la carga (1).
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201131855.
Solicitante: MECALUX S.A..
Nacionalidad solicitante: España.
Inventor/es: ROSALES LOZANO,Andreu.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B65G1/04 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65G DISPOSITIVOS DE TRANSPORTE O ALMACENAJE, p. ej. TRANSPORTADORES PARA CARGAR O BASCULAR, SISTEMAS TRANSPORTADORES PARA TALLERES O TRANSPORTADORES NEUMATICOS DE TUBOS (embalajes B65B; manipulación de material delgado o filiforme, p. ej. hojas de papel o fibras B65H; grúas B66C; aparatos de elevación o arrastre,p. ej. montacargas, B66D; dispositivos para elevar o bajar mercancías para carga y descarga, p. ej. carretillas elevadoras, B66F 9/00; vaciado de botellas, jarras, latas, barricas, barriles o contendores similares, no previstos en otro lugar, B67C 9/00; distribución o trasvase de líquidos B67D; llenado o descarga de contenedores para gases licuados, solidificados o comprimidos F17C; sistemas de conducción para fluídos F17D). › B65G 1/00 Almacenamiento de objetos, individualmente o con un cierto orden, en almacenes o depósitos (combinaciones de transportadores en almacenes, tiendas o talleres, B65G 37/00; apilado de objetos B65G 57/00; sacado de objetos de pilas B65G 59/00; máquinas de carga B65G 65/02). › mecánicos.
- G06Q10/00 FISICA. › G06 CALCULO; CONTEO. › G06Q METODOS O SISTEMAS DE PROCESAMIENTO DE DATOS ESPECIALMENTE ADAPTADOS PARA FINES ADMINISTRATIVOS, COMERCIALES, FINANCIEROS, DE GESTION, DE SUPERVISION O DE PRONOSTICO; METODOS O SISTEMAS ESPECIALMENTE ADAPTADOS PARA FINES ADMINISTRATIVOS, COMERCIALES, FINANCIEROS, DE GESTION, DE SUPERVISION O DE PRONOSTICO, NO PREVISTOS EN OTRO LUGAR. › Administración; Gestión.
Fragmento de la descripción:
Método y aparato para obtener la posición real de una carga dispuesta sobre una estantería de un almacén.
Objeto de la invención.
La presente invención se refiere a método y a un aparato que permiten obtener la posición real de una carga dispuesta sobre una estantería de un almacén.
La presente invención ha sido especialmente diseñada para su aplicación en almacenes automáticos, que comprenden sistemas de gestión de almacenaje configurados para el control de transelevadores que permiten manipular cargas de forma automática.
Antecedentes de la invención.
Los almacenes automáticos presentan una destacada importancia dentro del campo de la logística y distribución de mercancías. En efecto, estos almacenes gestionan eficazmente el almacenaje/dispensación de cuantiosos volúmenes de mercancías, buscando siempre una optimización de espacios y de recursos, así como una mayor agilidad en los procesos de manipulación de cargas.
Estos almacenes presentan normalmente un conjunto de estanterías con pasillos intermedios por los que se desplazan medios de transporte, tipo transelevadores, que gobernados por un sistema de gestión de almacenaje logran acceder a la parte frontal de cualquier zona de la estantería, con el objeto de extraer o introducir una o más cargas. Con carácter general, ante cualquier proceso de extracción o introducción de una carga suele llevarse a cabo un posicionamiento previo del transelevador frente a la posición teórica de la misma, entendiéndose como el lugar donde teóricamente se encuentra la carga antes de extraerla o el que teóricamente ocupará una vez introducida en una celda libre de la estantería. No obstante, en no pocas ocasiones sucede que la posición teórica de la carga no coincide con la posición real de la misma, o incluso que una celda teóricamente libre se encuentra en realidad ocupada. Son varios los motivos que pueden provocar que una carga almacenada sufra desplazamientos en cualquier eje de coordenadas (X, Y, Z) de un sistema de referencia fijo del almacén. Por citar algunos ejemplos, los movimientos sísmicos (aún siendo imperceptibles por el ser humano) , las dilataciones por cambios de temperatura de elementos estructurales de la estantería (como los largueros de apoyo o puntales) , la flexión de dichos elementos estructurales ante un inadecuado reparto de cargas sobre los mismos, la acción del viento sobre almacenes autoportantes, la interferencia de cargas contiguas en maniobras de extracción o introducción, etc. A su vez, un registro erróneo puede indicar celdas libres donde en realidad no las hay. Estas situaciones suelen ser el origen de graves accidentes. Más concretamente, puede pasar que los medios de extracción del transelevador lleguen a golpear contra la carga en vez de deslizarse bajo la misma en el momento de su extracción, o bien que una carga golpee contra otra contigua en el momento de su introducción en una celda libre, entre otras situaciones. Las consecuencias pueden ir desde un inadecuado reparto de cargas, hasta la aparición de daños sobre las propias cargas y las estanterías, e incluso el desprendimiento de cargas o el colapso de estanterías.
Actualmente se conocen diferentes soluciones para posicionar de una forma más o menos precisa un transelevador frente a la posición real de una carga.
Una de las soluciones más evolucionada consiste en montar a bordo de los medios de extracción del transelevador una combinación de fotocélulas de diversos tipos y funciones. La combinación de sus lecturas sobre puntos estratégicos de la paleta de una carga y el larguero donde apoya la misma permite conocer con no mucha precisión la posición relativa entre la carga paletizada y el transelevador. Esta solución presenta destacados inconvenientes. El primero de ellos concierne a su lentitud, ya que es necesario realizar un barrido en elevación para reconocer la posición exacta del larguero, y además obliga a los accionamientos y variadores de frecuencia del sistema, a trabajar en un modo manual que resulta más lento. Por otro lado, la precisión del sistema depende del ajuste manual de las fotocélulas, que será diferente en cada caso según las dimensiones de la estantería, y en concreto de sus largueros. A ello se le debe añadir la posibilidad de que el sistema se desajuste fácilmente ante ciclos de trabajo continuos y prolongados, ofreciendo por lo tanto poca seguridad y baja precisión. Finalmente, esta solución resulta además ciertamente compleja, debido al importante número y variedad de elementos que presenta, hecho que aumenta también la posibilidad de errores y problemas.
Otra solución consiste en montar a bordo de los medios de extracción del transelevador un dispositivo localizador de posiciones por medio de fotocélulas de infrarrojos. Dichos medios pueden detectar cambios de tonalidad de una superficie, la presencia de agujeros, relieves o puntos de referencia con una geometría determinada en los elementos estructurales que conforman la estantería, generalmente en sus largueros, o incluso en las paletas. Esta solución presenta también destacados inconvenientes. El primero de ellos concierne a la necesidad de realizar agujeros o añadir puntos de referencia pintados o en relieve, en todas las posiciones de almacenaje dentro de la estantería, lo cual encarece de forma considerable la fabricación o la instalación de la estantería. Otro inconveniente refiere a su poca precisión, pues resulta habitual la aparición de errores o problemas de funcionamiento debido a falsas detecciones de manchas, relieves o cambios de tonalidad accidentales, principalmente a causa de la suciedad, entre otras causas.
Las soluciones anteriores presentan además un problema común que concierne de nuevo a su precisión, y más concretamente a que no permiten obtener información relevante sobre la profundidad real a la que se encuentra la carga.
La presente invención resuelve de manera plenamente satisfactoria los problemas anteriormente comentados, mediante un método y un aparato que permiten obtener la posición real de una carga mediante la determinación del desplazamiento de la misma respecto a los ejes de coordenadas (X, Y, Z) de un almacén. Ello permite optimizar los procedimientos de extracción y de introducción de una carga, aportando una alta precisión, eficacia y seguridad de los mismos, a la vez que permite llevar a cabo un adecuado reparto de cargas sobre la estantería.
Descripción de la invención.
De acuerdo a un primer objeto de la presente invención, a continuación se describe un método para obtener la posición real de una carga dispuesta sobre una estantería de un almacén, y especialmente la de un almacén automático que comprende un sistema de gestión de almacenaje configurado para controlar uno o más transelevadores.
Cada uno de los translevadores permite llevar a cabo funciones correspondientes a la introducción, extracción y desplazamiento de cargas. Para ello es preciso previamente posicionar el transelevador frente a la posición teórica de la carga registrada en el sistema de gestión y correspondiente a la posición de un punto de referencia "P" de la misma. Dicho punto de referencia puede pertenecer tanto a la carga o a una paleta de la misma, en caso de que disponga de ella. La posición teórica se entiende como el lugar donde teóricamente se encuentra la carga antes de extraerla o el que teóricamente ocupará una vez introducida en una celda libre de la estantería, y que normalmente se relaciona con unas coordenadas de un sistema de referencia fijo (X, Y, Z) del almacén.
El método de la presente invención comprende las etapas de:
a) proyectar un haz de luz procedente de un emisor láser en dirección inclinada sobre una primera superficie frontal de la carga, cuya posición respecto al punto de referencia resulta conocida, y sobre una segunda superficie frontal de la estantería, donde dicho haz de luz láser proyectado genera un patrón con una forma geométrica al menos unidimensional que permite obtener:
a.1) una primera imagen proyectada sobre la primera superficie que presenta una primera parte de la forma geométrica; y a.2) una segunda imagen proyectada sobre la segunda superficie que presenta una segunda parte de la forma geométrica;
b) capturar mediante visión artificial las imágenes proyectadas; y c) determinar el desplazamiento del punto de referencia a partir de las imágenes proyectadas para obtener la posición real de la carga.
La forma geométrica del patrón proyectado requiere...
Reivindicaciones:
1. Método para obtener la posición real de una carga dispuesta sobre una estantería de un almacén, donde dicho almacén comprende un sistema de gestión de almacenaje configurado para controlar un transelevador (3) que permite introducir, extraer y desplazar la carga (1) , previo posicionamiento de dicho transelevador (3) frente a la posición teórica de la carga (1) registrada en el sistema de gestión y correspondiente a la posición de un punto de referencia (P) de la misma, dicho método caracterizado por que comprende las etapas de:
a) proyectar un haz de luz (41) procedente de un emisor láser (4) en dirección inclinada (a ) sobre una primera superficie (S1) frontal de la carga (1) , cuya posición respecto al punto de referencia (P) resulta conocida, y sobre una segunda superficie (S2) frontal de la estantería (2) , donde dicho haz de luz (41) láser proyectado genera un patrón con una forma geométrica al menos unidimensional que permite obtener:
a.1) una primera imagen (I) proyectada sobre la primera superficie (S1) que presenta una primera parte (42) de la forma geométrica; y a.2) una segunda imagen (I') proyectada sobre la segunda superficie (S2) que presenta una segunda parte (43) de la forma geométrica;
b) capturar las imágenes proyectadas (I, I') mediante medios de visión artificial (5) ; y c) determinar el desplazamiento del punto de referencia (P) a partir de las imágenes proyectadas (I, I') para obtener la posición real de la carga (1) .
2. Método para obtener la posición real de una carga dispuesta sobre una estantería de un almacén según la reivindicación 1 caracterizado por que el haz de luz (41) láser proyectado genera un patrón cuya forma geométrica se selecciona entre una forma de cruz o de cruz desdoblada.
3. Método para obtener la posición real de una carga dispuesta sobre una estantería de un almacén según cualquiera de las reivindicaciones 1 a 2 caracterizado por que la etapa c) comprende:
c.1) localizar el punto de referencia (P) para conocer su posición relativa respecto a la de un centro de referencia teórico (P') visto por los medios de visión artificial (5) , donde dicho centro de referencia teórico (P') refleja la posición del punto de referencia (P) que registra el sistema de gestión y la situación del transelevador (3) ; y c.2) calcular un desplazamiento horizontal (DX) y un desplazamiento vertical (DY) del punto de referencia (P) respecto al centro de referencia teórico (P') .
4. Método para obtener la posición real de una carga dispuesta sobre una estantería de un almacén según la reivindicación 3 caracterizado por que la etapa c) comprende:
c.3) calcular un desplazamiento en profundidad (DZ) del punto de referencia (P) respecto al centro de referencia teórico (P') .
5. Método para obtener la posición real de una carga dispuesta sobre una estantería de un almacén según cualquiera de las reivindicaciones 1 a 4 caracterizado por que la etapa c.1) comprende:
c.1a) obtener la posición (X, Y) de una pluralidad de vértices de las imágenes proyectadas (I, I') , donde dichos vértices señalan puntos del contorno de las superficies (S1, S2) a partir de los cuales se localiza el punto de referencia (P) .
6. Método para obtener la posición real de una carga dispuesta sobre una estantería de un almacén según cualquiera de las reivindicaciones anteriores 1 a 5 caracterizado por que:
- la primera superficie (S1) corresponde a la de un taco (12) de una paleta (11) que sostiene la carga (1) ;
y por que:
- la segunda superficie (S2) corresponde a la de un larguero (21) de la estantería (2) en el que se apoya dicho taco (12) .
7. Método para obtener la posición real de una carga dispuesta sobre una estantería de un almacén según cualquiera de las reivindicaciones anteriores 1 a 6 caracterizado por que el centro de referencia teórico (P') refleja la situación de un eje de referencia (33) del transelevador (3) que coincide con la línea de centro de una horquilla telescópica (32) perteneciente a unos medios de extracción (31) del mismo.
8. Aparato para obtener la posición real de una carga dispuesta sobre una estantería de un almacén, donde dicho almacén comprende un sistema de gestión configurado para controlar un transelevador (3) que permite introducir, extraer y desplazar la carga (1) , previo posicionamiento de dicho transelevador (3) frente a la posición teórica de la carga (1) registrada en el sistema de gestión y correspondiente a la posición de un punto de referencia (P) de la misma, dicho aparato caracterizado por que comprende:
• un emisor láser (4) dispuesto sobre el transelevador (3) configurado para proyectar un haz de luz (41) láser en dirección inclinada (a) sobre una primera superficie (S1) frontal de la carga (1) , cuya posición respecto al punto de referencia (P) resulta conocida, y sobre una segunda superficie (S2) frontal de la estantería (2) , donde dicho haz de luz (41) láser proyectado genera un patrón con una forma geométrica al menos unidimensional, obteniendo:
- una primera imagen (I) proyectada sobre la primera superficie (S1) que presenta una primera parte (42) de la forma geométrica; y
- una segunda imagen (I') proyectada sobre la segunda superficie (S2) que presenta una segunda parte (43) de la forma geométrica;
y;
• medios de visión artificial (5) configurados para capturar las imágenes proyectadas (I, I') y determinar el desplazamiento del punto de referencia (P) a partir de las imágenes proyectadas (I, I') para conocer la posición real de la carga (1) .
9. Aparato para obtener la posición real de una carga dispuesta sobre una estantería de un almacén según la reivindicación 8 caracterizado por que el haz de luz (41) proyectado por el emisor láser (4) genera un patrón cuya forma geométrica se selecciona entre una forma de cruz o de cruz desdoblada.
10. Aparato para obtener la posición real de una carga dispuesta sobre una estantería de un almacén según cualquiera de las reivindicaciones anteriores 7 a 9 caracterizado por que los medios de visión artificial (5) comprenden al menos una cámara de visión artificial (51) que filtra todas las longitudes de onda del espectro de luz salvo la longitud de onda emitida por el emisor láser (4) .
11. Aparato para obtener la posición real de una carga dispuesta sobre una estantería de un almacén según cualquiera de las reivindicaciones anteriores 7 a 10 caracterizado por que los medios de visión artificial (5) comprenden una centralita de comunicaciones (52) configurada para conectar una o más cámaras de visión artificial (51) y para suministrar la energía eléctrica necesaria para las mismas.
12. Aparato para obtener la posición real de una carga dispuesta sobre una estantería de un almacén según cualquiera de las reivindicaciones anteriores 7 a 11 caracterizado por que los medios de visión artificial (5) comprenden un procesador de visión industrial (53) en el que se integra el software que procesa las imágenes proyectadas (I, I') capturadas por la cámara de visión artificial (51) y que determina el desplazamiento del punto de referencia (P) a partir de dichas imágenes proyectadas (I, I') .
13. Aparato para obtener la posición real de una carga dispuesta sobre una estantería de un almacén según cualquiera de las reivindicaciones anteriores 7 a 12 caracterizado por que comprende una unidad de control (6) en la que se integra el software que gestiona los datos que recibe del emisor láser (4) , de los medios de visión artificial (5) y del sistema de gestión del almacén, para corregir la posición del transelevador (3) en función del desplazamiento del punto de referencia (P) y las imágenes proyectadas (I, I') , permitiendo que dicho transelevador (3) quede frente a la posición real de la carga (1) .
OFICINA ESPAÑOLA DE PATENTES Y MARCAS
Nº solicitud: 201131855
ESPAÑA
Fecha de presentación de la solicitud: 17.11.2011
Fecha de prioridad:
INFORME SOBRE EL ESTADO DE LA TECNICA
51 Int. Cl. : B65G1/04 (2006.01) G06Q10/00 (2012.01)
DOCUMENTOS RELEVANTES
Categoría 56 Documentos citados Reivindicaciones afectadas X Mecalux. Una vista mejor. Vol. 1 No. 4 | Sísmico. 31.10.2011 [en línea], [recuperado 27.03.2012] Recuperado de Internet < http://www.mecalux.cl/navigation/news/NewsDetail.do?id=33743425&buscar=galileo > 1-13 A Mecalux. La fuerza que guía por dentro Vol. 1 No. 4 | Sísmico. 31.10.2011 [en línea], [recuperado 27.03.2012] Recuperado de Internet http://www.mecalux.cl/navigation/news/Noticias.do 1-13 A US 7196777 B1 (ATSAVAPRANEE PAISAN et al.) 27.03.2007, resumen; figuras. 3-5 Categoría de los documentos citados X: de particular relevancia Y: de particular relevancia combinado con otro/s de la misma categoría A: refleja el estado de la técnica O: referido a divulgación no escrita P: publicado entre la fecha de prioridad y la de presentación de la solicitud E: documento anterior, pero publicado después de la fecha de presentación de la solicitud El presente informe ha sido realizado • para todas las reivindicaciones • para las reivindicaciones nº : Fecha de realización del informe 29.03.2012 Examinador J. Santaella Vallejo Página 1/5INFORME DEL ESTADO DE LA TÉCNICA
Nº de solicitud: 201131855
Documentación mínima buscada (sistema de clasificación seguido de los símbolos de clasificación) B65G, G06Q Bases de datos electrónicas consultadas durante la búsqueda (nombre de la base de datos y, si es posible, términos de búsqueda utilizados) INVENES, EPODOC
Informe del Estado de la Técnica Página 2/5
OPINIÓN ESCRITA
Nº de solicitud: 201131855
Fecha de Realización de la Opinión Escrita: 29.03.2012
Declaración
Novedad (Art. 6.1 LP 11/1986) Reivindicaciones Reivindicaciones 2-7, 9-13 1, 8 SI NO Actividad inventiva (Art. 8.1 LP11/1986) Reivindicaciones Reivindicaciones 1-13 SI NOSe considera que la solicitud cumple con el requisito de aplicación industrial. Este requisito fue evaluado durante la fase de examen formal y técnico de la solicitud (Artículo 31.2 Ley 11/1986) .
Base de la Opinión.
La presente opinión se ha realizado sobre la base de la solicitud de patente tal y como se publica.
Informe del Estado de la Técnica Página 3/5
OPINIÓN ESCRITA
Nº de solicitud: 201131855
1. Documentos considerados.
A continuación se relacionan los documentos pertenecientes al estado de la técnica tomados en consideración para la realización de esta opinión.
Documento Número Publicación o Identificación Fecha Publicación D01 Mecalux. Una vista mejor. Vol. 1 No. 4 | Sísmico. 31.10.2011 [en línea], [recuperado 27.03.2012] Recuperado de Internet < http://www.mecalux.cl/navigation/news/NewsDetail.do?id=33743425&buscar=galileo > 31.10.2011 D02 Mecalux. La fuerza que guía por dentro Vol. 1 No. 4 | Sísmico. 31.10.2011 [en línea], [recuperado 27.03.2012] Recuperado de Internet http://www.mecalux.cl/navigation/news/Noticias.do 31.10.2011 D03 US 7196777 B1 (ATSAVAPRANEE PAISAN et al.) 27.03.20072. Declaración motivada según los artículos 29.6 y 29.7 del Reglamento de ejecución de la Ley 11/1986, de 20 de marzo, de Patentes sobre la novedad y la actividad inventiva; citas y explicaciones en apoyo de esta declaración
La invención reivindicada presenta un método y un aparato que permiten obtener la posición real de una carga dispuesta sobre una estantería de un almacén. Posee un laser que crea una imagen en dos planos y una cámara de visión artificial compara la posición real con la teórica según el resultado que obtenga puede ajustar la posición de la horquilla o activar una alarma.
El documento del estado de la técnica más próximo a la invención es D01 y divulga una noticia relativa a una grúa de apilado que utiliza un rayo láser hacia un blanco remoto - en este caso, el larguero - para calcular la distancia entre la cuna y el rayo.
Para mayor claridad, y en la medida de lo posible, se emplea la misma redacción utilizada en la reivindicación 1. Las referencias entre paréntesis corresponden al D01. Las características técnicas que no se encuentran en el documento D01 se indican entre corchetes.
Reivindicación 1
Método para obtener la posición real de una carga dispuesta sobre una estantería de un almacén, donde dicho almacén comprende un sistema de gestión de almacenaje configurado para controlar un transelevador que permite introducir, extraer y desplazar la carga, previo posicionamiento de dicho transelevador frente a la posición teórica de la carga registrada en el sistema de gestión y correspondiente a la posición de un punto de referencia de la misma, dicho método que comprende las etapas de:
a) proyectar un haz de luz procedente de un emisor láser en dirección inclinada (a) sobre una primera superficie frontal de la carga, cuya posición respecto al punto de referencia resulta conocida, y sobre una segunda superficie frontal de la estantería, donde dicho haz de luz láser proyectado genera un patrón con una forma geométrica al menos unidimensional que permite obtener:
a.1) una primera imagen proyectada sobre la primera superficie (S1) que presenta una primera parte de la forma geométrica; y a.2) una segunda imagen proyectada sobre la segunda superficie (S2) que presenta una segunda parte de la forma geométrica;
b) capturar las imágenes proyectadas mediante medios de visión artificial; y c) determinar el desplazamiento del punto de referencia a partir de las imágenes Las características de las reivindicación primera ya son conocidas del documento D01 (párrafos 2 y 3) , "el sistema de gestión" se incluye por referencia en el documento en D01 cuando menciona "usando un software de control Galileo" documento D02. Por lo tanto esa reivindicación no es nueva a la vista del estado de la técnica conocido tal como se establece en los artículos 6 de la Ley de Patentes 1986.
Reivindicaciones 2, 6 y 7 Se considera que las características de diseño divulgadas en las reivindicaciones dependientes 2, 6 y 7, el haz de luz láser proyectado genera un patrón cuya forma geométrica se selecciona entre una forma de cruz o de cruz desdoblada; (S1) corresponde a la de un taco y (S2) corresponde a la de un larguero y que el centro de referencia teórico (P') refleja la situación de un eje de referencia del transelevador que coincide con la línea de centro de una horquilla telescópica son meras ejecuciones particulares y por lo tanto evidentes para un experto en la materia.
Por lo tanto a la luz de D01, las reivindicaciones 2, 6 y 7 son nuevas pero carecen de actividad inventiva tal como se establece en los artículos 6 y 8 de la Ley de Patentes 1986.
Informe del Estado de la Técnica Página 4/5
OPINIÓN ESCRITA
Nº de solicitud: 201131855
Reivindicación 3-5 El objeto en las reivindicaciones 3-5 comprende sólo modos de realización del cálculo de la posición y no se puede considerar que implique actividad inventiva.
Por lo tanto a la luz de D01, las reivindicaciones 3-5 son nuevas pero carecen de actividad inventiva tal como se establece en los artículos 6 y 8 de la Ley de Patentes 1986.
Reivindicación 8 Aparato para obtener la posición real de una carga dispuesta sobre una estantería de un almacén, donde dicho almacén comprende un sistema de gestión configurado para controlar un transelevador que permite introducir, extraer y desplazar la carga, previo posicionamiento de dicho transelevador frente a la posición teórica de la carga registrada en el sistema de gestión y correspondiente a la posición de un punto de referencia de la misma, dicho aparato comprende:
• un emisor láser dispuesto sobre el transelevador configurado para proyectar un haz de luz láser en dirección inclinada (a) sobre una primera superficie (S1) frontal de la carga, cuya posición respecto al punto de referencia (P) resulta conocida, y sobre una segunda superficie (S2) frontal de la estantería, donde dicho haz de luz láser proyectado genera un patrón con una forma geométrica al menos unidimensional, obteniendo:
• medios de visión artificial configurados para capturar las imágenes proyectadas (I, I') y determinar el desplazamiento del punto de referencia (P) a partir de las imágenes proyectadas (I, I') para conocer la posición real de la carga. Las características de las reivindicación octava ya son conocidas del documento D01 (párrafos 2 y 3) . Por lo tanto esa reivindicación no es nueva a la vista del estado de la técnica conocido tal como se establece en los artículos 6 de la Ley de Patentes 1986. Reivindicaciones 9-13 A la vista del documento citado D01-D03 el resto de reivindicaciones son cuestiones prácticas, las cuales son conocidas previamente del documento citado. Por lo tanto a la luz de D01, las reivindicaciones 9-13 son nuevas pero carecen de actividad inventiva tal como se establece en los artículos 6 y 8 de la Ley de Patentes 1986 Informe del Estado de la Técnica Página 5/5 o una primera imagen (I) proyectada sobre la primera superficie (S1) que presenta una primera parte de la forma geométrica; y
o una segunda imagen (I') proyectada sobre la segunda superficie (S2) que presenta una segunda parte de la forma geométrica;
Patentes similares o relacionadas:
Reinicio controlado del servicio eléctrico dentro de un área de servicio público, del 29 de Julio de 2020, de Landis+Gyr Innovations Inc: Un controlador central para uso en un sistema de gestión de carga activa que incluye una pluralidad de dispositivos de cliente […]
Método y sistema para controlar y comunicar la velocidad de llenado de un contenedor, del 10 de Junio de 2020, de Enevo Oy: Un método para controlar la velocidad de llenado de un contenedor y comunicar la velocidad de llenado controlada a un servidor , el contenedor comprende […]
Sistema y método para sincronizar información de configuración de medicación entre sistemas que contienen información de configuración de medicación, del 27 de Mayo de 2020, de ICU MEDICAL, INC.: Un método para sincronizar información maestra de configuración de medicación dentro de un sistema de información de farmacia que comprende un ordenador […]
SISTEMA Y MÉTODO DE COMPROBACIÓN Y MONITORIZACIÓN DEL RETIMBRADO DE DISPOSITIVOS CONTRA INCENDIOS, del 14 de Mayo de 2020, de EXWIFIRE TECHNOLOGIES, S.L: Sistema de comprobación y monitorización del retimbrado de dispositivos contra incendios, con el que se certifica la prueba hidrostática en […]
Detector para su disposición en el cuerpo de monitorización continua de glucosa que tiene una pantalla visual, del 13 de Mayo de 2020, de BECTON, DICKINSON AND COMPANY: Dispositivo para su disposición en el cuerpo para detectar un analito en un cuerpo vivo, que comprende: una cubierta que contiene […]
Seguimiento de contenedores, del 26 de Febrero de 2020, de INMARSAT GLOBAL LIMITED: Un sistema de seguimiento de contenedores que comprende una pluralidad de contenedores con paredes metálicas , al menos uno de los contenedores […]
Mejoras en sistema electrónico antirrobo para el control, identificación y detección del fruto del olivar, del 20 de Enero de 2020, de OLIDETEC TECHNOLOGY, S.L: Mejoras en sistema electrónico antirrobo para el control, identificación y detección del fruto del olivar. Constituida a partir de un sistema electrónico encapsulado […]
Sistema para proporcionar información del cuerpo de un caballo, método de extracción de datos de imágenes fijas del cuerpo del caballo, programa de extracción de datos de imágenes fijas del cuerpo del caballo, y soporte de grabación legible por ordenador, del 8 de Enero de 2020, de RAKUTEN, INC: Un sistema proveedor de información sobre cuerpos de caballos que comprende: un dispositivo de almacenamiento de datos de imágenes en movimiento […]