MÁQUINA DE CONTROL NUMÉRICO DESMONTABLE.
Máquina de control numérico desmontable que comprende una primera bancada longitudinal (1),
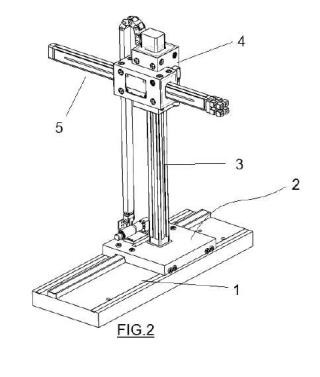
una base (2), una columna (3) solidariamente unida a la base (2), un carro secundario o cruceta (4) y un brazo (5), donde el carro principal o base (2) se desplaza sobre la bancada longitudinal (1) horizontalmente, mientras que el carro secundario o cruceta (4) es desplazable verticalmente respecto de la columna (3); y donde, además, el brazo (5) es móvil horizontalmente respecto de la cruceta (4); y que además comprende un útil de transporte (6) configurada una bancada longitudinal auxiliar adosada a la bancada principal (1).
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201330701.
Solicitante: UNIMETRIK, S.A.
Nacionalidad solicitante: España.
Inventor/es: DE LA MAZA URIARTE,Borja.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01B5/008 FISICA. › G01 METROLOGIA; ENSAYOS. › G01B MEDIDA DE LA LONGITUD, ESPESOR O DIMENSIONES LINEALES ANALOGAS; MEDIDA DE ANGULOS; MEDIDA DE AREAS; MEDIDA DE IRREGULARIDADES DE SUPERFICIES O CONTORNOS. › G01B 5/00 Disposiciones de medida caracterizadas por la utilización de medios mecánicos (instrumentos de los tipos cubiertos por el grupo G01B 3/00 en sí G01B 3/00). › que utilizan máquinas de medida de coordenadas.
Fragmento de la descripción:
El objeto de la presente invención es una máquina de control numérico (eNe) con escaneado automático y que permite su desmontaje para un traslado sencillo, manteniendo unas características óptimas en el digitalizado de alta precisión en tres dimensiones.
Estado de la técnica En la actualidad no se dispone de máquinas eNe de escaneado automático portatiles y/o desmontables basadas en un sistema de tres ejes cartesianos que permitan una digitalización en tres dimensiones precisa y automática. Los equipos portátiles disponibles en el mercado son básicamente máquinas de uso manual y, por tanto, ni automatizadas, ni motorizadas, tales como brazos portátiles (FARO) o sistemas de proyección de franjas tipo GOM, como por ejemplo, se describen en los documentos US 7, 779, 549, ES 2 185 431 , USD659035, USD643319, US 7, 246, 030 y US 5, 131, 166.
Descripción de la invención En aras de solucionar el problema técnico indicado, la presente invención describe una máquina CNC de escaneado 3D automatizada y motorizada desmontable para el escaneado 3D de alta definición. Los componentes y estructura de la máquina están diseñados para facilitar el proceso de montaje y desmontaje de la misma, así como su traslado, al tiempo que mantiene y garantiza su alta precisión al escanear piezas o superficies. Esta máquina de escaneado 3D motorizada y automatizada permite su traslado e instalación en la ubicación deseada, gracias a una serie de pasos simples para su montaje y puesta en marcha, asegurando un digitalización 3D de precisión.
Más concretamente, la presente invención está compuesta de una máquina de escaneado de 3 ejes cartesianos, un sensor de escaneado 3D que se acopla a dicha máquina y equipos de control y software para controlar el movimiento del sistema y realizar el digitalizado 3D.
La máquina de tres ejes cartesianos se compone de una bancada longitudinal, una base, 35 una columna, una cruceta, un brazo y un útil de transporte, diseñados de tal forma que pueden desmontarse de tal forma que la bancada longitudinal, la base, la columna y la cruceta se pliegan sobre el útil de transporte, mientras que el brazo se guarda directamente en una maleta de transporte. Cada uno de los componentes de la máquina cuenta con los elementos necesarios para su movimiento y control, como motores, pistas de rodadura, reglas de lectura, y otros necesarios para realizar su función. Por otro lado, el sensor de escaneado cuenta con una pieza de soporte que permite acoplarla al brazo y un montaje rápido y sencillo.
El sistema cuenta con el cableado necesario para la conexión de los diversos equipos y sistemas, caracterizado por disponer de conectores fácilmente identificables que no permiten la conexión errónea de los sistemas.
Finalmente, el conjunto se completa con una maleta de transporte diseñada para alojar y transportar de forma segura y cómoda los anteriores elementos y accesorios como cableados. La maleta de control está diseñada para albergar y transportar de forma segura y cómoda los equipos destinados al control del movimiento de la máquina, el sensor de escaneado 3D y a la realización de las tareas propias del escaneado 3D.
A lo largo de la descripción y las reivindicaciones la palabra "comprende" y sus variantes no pretenden excluir otras características técnicas, aditivos, componentes o pasos. Para los expertos en la materia, otros objetos, ventajas y características de la invención se desprenderán en parte de la descripción y en parte de la práctica de la invención. Los siguientes ejemplos y dibujos se proporcionan a modo de ilustración, y no se pretende que restrinjan la presente invención. Además, la presente invención cubre todas las posibles combinaciones de realizaciones particulares y preferidas aquí indicadas.
Breve descripción de las figuras A continuación se pasa a describir de manera muy breve una serie de dibujos que ayudan a comprender mejor la invención y que se relacionan expresamente con una realización de dicha invención que se presenta como un ejemplo no limitativo de ésta.
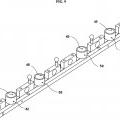
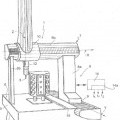
FIG 1. Muestra distintas vistas de la máquina objeto de la presente invención. FIG 2. Muestra una vista de la máquina objeto de la invención montada. FIG 3. Muestra una vista de la máquina objeto de la invención desmontada.
Exposición de un modo detallado de realización de la invención Tal y como se puede observar en las figuras adjuntas, la máquina objeto de la presente invención comprende una primera bancada longitudinal (1) , un carro principal o base (2 ) , una columna (3) solidariamente unida a la base (2) , un carro secundario o cruceta (4) y un brazo (5) ; de tal forma que el carro principal o base (2) se desplaza sobre la bancada longitudinal (1) horizontalmente, mientras que el carro secundario o cruceta (4) es desplazable verticalmente respecto de la columna (3) ; y donde, además, el brazo (5) es móvil, a su vez, respecto de la cruceta (4) horizontalmente.
Por otro lado, la máquina se completa con un útil de transporte o bancada auxiliar (6) , que es una bancada longitudinal la cual se adosada a la bancada principal (1) , en el momento en que se procede al traslado, y en el que la máquina descansa durante el mismo.
La máquina para el escaneado 3D está configurada con un sistema de 3 ejes cartesiano. Por tanto, el desplazamiento del carro secundario (4) se realiza en el eje Z de la máquina, mientras que el desplazamiento del brazo (5) se realiza en el eje Y de la máquina y la base (2) materializa el movimiento respecto del eje X de la misma. Los tres ejes (X, Y, Z) de la máquina se mueven independientemente entre sí, permitiendo mover de forma automatizada el sensor de escaneado dentro del volumen de medición . Este volumen de medición es un paralelepípedo y la longitud de sus lados depende de los recorridos de los ejes de la máquina.
La máquina desmontable flexible y automática para el escaneado 3D de alta definición incluye junto con la máquina cartesiana de tres ejes, el sensor de escaneado 3D y su pieza de soporte o dado, y los equipos de control necesarios para gestionar los movimientos y el escaneado 3D. El software de escaneado y el control CNC de tres ejes permiten operar la máqUina de escaneado desmontable controlando en todo momento la posición y el
movimiento de los tres ejes así como la orientación del sensor de escaneado, a la vez que gestiona el resto de parámetros de la operación, permitiendo realizar un escaneado de alta precisión. Así pues , el sistema de movimiento en los ejes comprende los motores, sistemas de reducción y reenvíos angulares, sistemas de tracción por fricción (polea-guía en el eje X, y ejes fijos-pistas de rodadura en ejes Y-Z) necesarios para el movimiento de los mismos. La máquina se completa con un sistema de lectura de la posición de los ejes: la escala óptica y 4
cabeza lectora.
Por otro lado y ya refiriéndonos a las partes principales que componen la máquina, la bancada longitudinal (1) es el apoyo a lo largo del cual se mueve la base (2) o carro principal (el eje X de la máquina) , con insertos en pistas de rodadura, guía y casquillos reguladores de nivelación. La guía del eje X, se coloca en la parte superior de la bancada (1) , y es de igual longitud. La regla de lectura del eje X se sitúa en la parte superior de la guía. La bancada (1) cuenta con unos casquillos de unión (8) en su lateral, en los que encajan los insertos (7) del útil de transporte (6) .
El carro principal o base (2) permite el movimiento de la máquina a lo largo del eje X. Consiste en una base que se desliza a lo largo de la bancada principal (1) Y una columna (3) con pistas de rodadura solidaria a ella. El carro principal (2) dispone de ocho conjuntos de ejes con rodamientos que ruedan sobre las pistas de rodadura situadas en la parte superior de la bancada (1) Y cuatro conjuntos de ejes con rodamientos en la guía. La cabeza lectora de la coordenada en el eje de X está situada en la parte trasera de la base (2) . La escala óptica de la lectura de la coordenada del eje Z está situada en uno de los laterales de la columna (3) .
El carro secundario o cruceta (4) consiste en un cuerpo que se monta sobre la columna (3) y que aloja el brazo (5) de la máquina, permitiendo el movimiento a lo largo de la columna (3) en el eje Z y, por tanto, su desplazamiento se realiza en el eje Z del sistema de referencia de máquina. El movimiento de la cruceta (4) se apoya en rodamientos que se mueven a lo largo de ocho pistas de rodadura que se encuentran próximas a la columna (3) , asegurando de este modo un movimiento de alta precisión.
El sistema del motorizado del eje Z se encuentra localizado en la parte trasera de la cruceta (4) proporcionando...
Reivindicaciones:
-Máquina de control numérico desmontable que comprende una primera bancada longitudinal (1 ) , una base (2) , una columna (3) solidariamente unida a la base (2) , un carro 5 secundario o cruceta (4) y un brazo (5) y donde el carro principal o base (2) se desplaza sobre la bancada longitudinal (1) horizontalmente, mientras que el carro secundario o cruceta (4) es desplazable verticalmente respecto de la columna (3) ; y donde, además, el brazo (5) es móvil horizontalmente respecto de la cruceta (4) caracterizado porque comprende un útil de transporte (6) configurado como una bancada longitudinal auxiliar
adosada a la bancada principal (1) sobre la que descansan la base (2) , la columna (3) y la cruceta (4) en posición de transporte.
-Máquina de acuerdo con la reivindicación 1 que está configurada con un sistema de tres ejes cartesiano, de tal forma que el desplazamiento del carro secundario (4) se realiza en el eje Z de la máquina, mientras que el desplazamiento del brazo (5) se realiza en el eje Y de la máquina y la base (2) materializa el movimiento respecto del eje X de la misma, siendo el movimiento de los tres ejes de la máquina independientes entre sí.
-Máquina de acuerdo con cualquiera de las reivindicaciones 1-2 donde la bancada longitudinal (1) es el apoyo a lo largo del cual se mueve la base (2) o carro principal y comprende una pluralidad de insertos en pistas de rodadura, guía y casquillos reguladores de nivelación; y donde la bancada (1) comprende una pluralidad de casquillos de unión (8) en su lateral, que se corresponden con unos insertos (7) del útil de transporte (6) .
2.
4. Máquina de acuerdo con cualquiera de las reivindicaciones 1-3 donde el carro principal o base (2) comprende una base que se desliza a lo largo de la bancada principal
(1) Y una columna (3) con pistas de rodadura solidarias a dicha columna.
- Máquina de acuerdo con la reivindicación 4 donde el carro principal (2) dispone de unos conjuntos de ejes con rodamientos que ruedan sobre las pistas de rodadura situadas en la parte superior de la bancada (1) Y cuatro conjuntos de ejes con rodamientos en la guía.
-Máquina de acuerdo con cualquiera de las reivindicaciones 4-5 donde la cabeza 35 lectora de la coordenada en el eje X de la máquina está situada en la parte trasera de la base (2) , mientras que la escala óptica de la lectura de la coordenada del eje Z está situada en uno de los laterales de la columna (3) .
-Máquina de acuerdo con cualquiera de las reivindicaciones 1-6 donde el carro secundario o cruceta (4) comprende un cuerpo que se monta sobre la columna (3) y que aloja el brazo (5) de la máquina, permitiendo el movimiento a lo largo de la columna (3) en el eje Z del sistema de referencia de máquina; y donde dicho movimiento de la cruceta (4) se apoya en rodamientos que se mueven a lo largo de unas pistas de rodadura que se encuentran próximas a la columna (3) .
-Máquina de acuerdo con la reivindicación 7 donde en la parte trasera de la cruceta (4) queda situado el sistema motorizado que proporciona el movimiento a la cruceta
(4) mediante un sistema de fricción mediante un eje fijo y ayudado por un contrapesado, mientras que la cabeza lectora del eje Z de la máquina se encuentra en el interior de la cruceta (4) .
-Máquina de acuerdo con cualquiera de las reivindicaciones 1-8 donde el brazo
(5) proporciona a la máquina el movimiento en el eje Y al desplazarse dentro de la cruceta
(4) dónde se aloja, en una dirección ortogonal a la columna (3) y a la bancada (1) ; y donde dicho movimiento se apoya en rodamientos que se mueven a lo largo de unas pistas de rodadura que se encuentran próximas al brazo (5) .
- Máquina de acuerdo con cualquiera de las reivindicaciones 1-9 donde el final del brazo (5) contiene un sensor láser amarrado al mismo a través de una pieza de soporte.
Patentes similares o relacionadas:
 Aparato y procedimiento de formación de imágenes intracraneales, del 30 de Octubre de 2019, de Archeoptix Biomedical Inc: Un aparato de formación de imágenes, que comprende:
una red de al menos tres transceptores electromagnéticos coplanarios que definen un plano de recepción;
al menos […]
Aparato y procedimiento de formación de imágenes intracraneales, del 30 de Octubre de 2019, de Archeoptix Biomedical Inc: Un aparato de formación de imágenes, que comprende:
una red de al menos tres transceptores electromagnéticos coplanarios que definen un plano de recepción;
al menos […]
Metrología de alta velocidad con máquinas numéricamente controladas, del 25 de Abril de 2018, de Grale Technologies: Un sistema que comprende: un dispositivo de metrología unido a un brazo de herramienta operativa y configurado para medición, para un ciclo de movimiento […]
 Método de calibración de un modelo matemático para una máquina de medición de coordenadas para la compensación de errores dinámicos debidos a la deformación, del 10 de Febrero de 2016, de HEXAGON METROLOGY S.P.A: 1. Un método de calibración de un modelo matemático de una máquina de medición para la compensación de errores debidos a deformación dinámica, que […]
Método de calibración de un modelo matemático para una máquina de medición de coordenadas para la compensación de errores dinámicos debidos a la deformación, del 10 de Febrero de 2016, de HEXAGON METROLOGY S.P.A: 1. Un método de calibración de un modelo matemático de una máquina de medición para la compensación de errores debidos a deformación dinámica, que […]
Máquina de medición de coordenadas, del 21 de Enero de 2015, de HEXAGON METROLOGY S.P.A: Una máquina de medición de coordenadas que comprende una base provista de primeros medios de guía a lo largo de un primer eje horizontal […]
 MÁQUINA DE CONTROL NUMÉRICO DESMONTABLE, del 20 de Noviembre de 2014, de UNIMETRIK, S.A: Máquina de control numérico desmontable que comprende una primera bancada longitudinal , una base , una columna solidariamente unida a la base , un […]
MÁQUINA DE CONTROL NUMÉRICO DESMONTABLE, del 20 de Noviembre de 2014, de UNIMETRIK, S.A: Máquina de control numérico desmontable que comprende una primera bancada longitudinal , una base , una columna solidariamente unida a la base , un […]
 MÉTODO Y PATRÓN DE CARACTERÍSTICAS GEOMÉTRICAS PARA CALIBRACIÓN Y VERIFICACIÓN DE LA MEDICIÓN CON BRAZOS ARTICULADOS DE MEDIR POR COORDENADAS, del 12 de Septiembre de 2014, de UNIVERSIDAD DE OVIEDO: Método y patrón de características geométricas para la verificación y calibración de la medición con brazos articulados de medir por coordenadas, que comprende […]
MÉTODO Y PATRÓN DE CARACTERÍSTICAS GEOMÉTRICAS PARA CALIBRACIÓN Y VERIFICACIÓN DE LA MEDICIÓN CON BRAZOS ARTICULADOS DE MEDIR POR COORDENADAS, del 12 de Septiembre de 2014, de UNIVERSIDAD DE OVIEDO: Método y patrón de características geométricas para la verificación y calibración de la medición con brazos articulados de medir por coordenadas, que comprende […]
 Método y patrón de características geométricas para calibración y verificación de la medición con brazos articulados de medir por coordenadas, del 4 de Septiembre de 2014, de UNIVERSIDAD DE OVIEDO: Método y patrón de características geométricas para la verificación y calibración de la medición con brazos articulados de medir por coordenadas, que comprende esferas macizas, […]
Método y patrón de características geométricas para calibración y verificación de la medición con brazos articulados de medir por coordenadas, del 4 de Septiembre de 2014, de UNIVERSIDAD DE OVIEDO: Método y patrón de características geométricas para la verificación y calibración de la medición con brazos articulados de medir por coordenadas, que comprende esferas macizas, […]
 COMPENSACIÓN DE ERRORES DE MEDICIÓN DEBIDOS A DEFORMACIONES DINÁMICAS EN UNA MÁQUINA DE MEDICIÓN DE COORDENADAS, del 27 de Mayo de 2011, de HEXAGON METROLOGY S.P.A: Una máquina de medición que comprende una unidad móvil para desplazar un sensor de medición dentro de un volumen de medición, comprendiendo la unidad móvil al […]
COMPENSACIÓN DE ERRORES DE MEDICIÓN DEBIDOS A DEFORMACIONES DINÁMICAS EN UNA MÁQUINA DE MEDICIÓN DE COORDENADAS, del 27 de Mayo de 2011, de HEXAGON METROLOGY S.P.A: Una máquina de medición que comprende una unidad móvil para desplazar un sensor de medición dentro de un volumen de medición, comprendiendo la unidad móvil al […]