Exoesqueleto robótico para movimiento de un miembro.
Un exoesqueleto robótico (100), que comprende: 5 una primera conexión mecánica adaptada para acoplarse a una primera unión seleccionada de un miembro de un sujeto,
la primera conexión mecánica que incluye conexiones para dicho acoplamiento a la primera unión seleccionada, con al menos una unión que tiene articulación alrededor de un eje; y
medio de sujeción del miembro para sujetar el miembro a la conexión;
en donde la primera conexión mecánica define una unión virtual (1, 110, 120) que tiene un eje que no se localiza en la conexión mecánica;
en donde la unión virtual (1, 110, 120) se acopla a la primera unión seleccionada del miembro cuando el miembro se sujeta a la conexión;
en donde la primera conexión mecánica no se localiza en, o a lo largo de un eje de la primera unión seleccionada del miembro cuando la primera unión seleccionada se acopla a la unión virtual (1, 110, 120);
en donde la primera conexión mecánica incluye una segunda unión que no se localiza en un eje de la primera unión seleccionada del miembro cuando la primera unión seleccionada se acopla a la unión virtual (1, 110, 120); y
en donde la primera conexión mecánica incluye conexiones que acoplan la cinemática y cinética de la unión virtual (1, 110, 120) a la segunda unión de la primera conexión mecánica.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/CA2008/000839.
Solicitante: QUEEN'S UNIVERSITY AT KINGSTON.
Nacionalidad solicitante: Canadá.
Dirección: Kingston, ON K7L 2N6 CANADA.
Inventor/es: SCOTT,STEPHEN H, BROWN,IAN E, BALL,STEPHEN J.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A61B5/11 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61B DIAGNOSTICO; CIRUGIA; IDENTIFICACION (análisis de material biológico G01N, p.ej. G01N 33/48). › A61B 5/00 Medidas encaminadas a establecer un diagnóstico (diagnóstico por medio de radiaciones A61B 6/00; diagnóstico por ondas ultrasónicas, sónicas o infrasónicas A61B 8/00 ); Identificación de individuos. › Medida del movimiento del cuerpo entero o de partes del mismo, p. ej. temblor de la cabeza o de las manos, movilidad de un miembro (para medida del pulso A61B 5/02).
- A61H1/00 A61 […] › A61H APARATOS DE FISIOTERAPIA, p. ej. DISPOSITIVOS PARA LOCALIZAR O ESTIMULAR LOS PUNTOS EN DONDE SE LOCALIZAN LOS CUERPOS; RESPIRACION ARTIFICIAL; MASAJE; DISPOSITIVOS DE BAÑO PARA USOS TERAPEUTICOS O HIGIENICOS PARTICULARES O PARA PARTES DETERMINADAS DEL CUERPO (electroterapia, magnetoterapia, radioterapia, terapia por ultrasonidos A61N). › Aparatos para el ejercicio pasivo (A61H 5/00 tiene prioridad ); Aparatos vibradores; Dispositivos quiroprácticos, p. ej. dispositivos para aplicar impactos al cuerpo, dispositivos externos para estirar o alinear de forma ligera los huesos no fracturados .
- B25J3/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › Manipuladores del tipo control dominado, es decir, manipuladores en los que la unidad de control y la unidad controlada ejecutan movimientos correspondientes en el espacio.
- B25J3/02 B25J […] › B25J 3/00 Manipuladores del tipo control dominado, es decir, manipuladores en los que la unidad de control y la unidad controlada ejecutan movimientos correspondientes en el espacio. › dotados de un acoplamiento en paralelogramo entre la unidad de control y la unidad controlada (pantógrafos B43L 13/00).
PDF original: ES-2496615_T3.pdf

Fragmento de la descripción:
Exoesqueleto robótico para movimiento de un miembro Campo de la invención
Esta invención se refiere generalmente a un exoesqueleto robótico que se sujeta a un miembro de un sujeto, para usar en áreas tales como de evaluación, rehabilitación, y/o investigación que involucran la función motora. En particular, la invención se refiere a un exoesqueleto robótico que proporciona acoplamiento mecánico fuera del eje de una o más uniones de un miembro de un sujeto. La invención se refiere además a un exoesqueleto robótico que tiene acoplamiento entre dos o más uniones, en donde la separación entre las uniones es fácilmente ajustable para acomodar diferentes tamaños de miembros. La invención se refiere además a exoesqueletos robóticos que tienen combinaciones de tales características.
Antecedentes de la invención
El accidente cerebrovascular, lesión física, y enfermedad son causas de deficiencia de la función motora que involucran uno o más miembros. Frecuentemente es posible recuperar un poco de función motora a través de la rehabilitación, y la práctica de movimientos funcionales de múltiples uniones con el miembro deficiente como una parte importante de la recuperación motora (Dobkin, 24). Las técnicas terapéuticas actuales por lo tanto se enfocan en el entrenamiento con movimientos funcionales frecuentes repetitivos (Teasell y otros, 23).
Proporcionar a los pacientes la atención que ellos necesitan es un reto. Cada paciente requiere atención uno a uno extensiva, y los programas terapéuticos son físicamente extenuantes para el terapeuta. El uso de dispositivos robóticos para proporcionar terapia podría mejorar la eficiencia y efectividad de la terapia, y esto ha estado en primer plano de la investigación reciente de rehabilitación de accidentes cerebrovasculares (Hesse y otros, 23; Reinkensmeyer y otros, 24). Los robots no sólo tienen la habilidad de proporcionar entrenamiento de movimientos funcionales repetitivos, sino además pueden proporcionar evaluaciones cuantitativas objetivas y sensibles del movimiento. La tecnología hace posible además para un solo terapeuta supervisar múltiples pacientes simultáneamente.
Los robots existentes para la rehabilitación y asistencia de miembros superiores incluyen MIT-MANUS (Krebs y otros, 1998), MIME (Burgar y otros, 2), GENTLE/s (Loureiro y otros, 23), MULOS (Johnson y otros, 21), T-WREX (Sánchez y otros, 24; ARMEO (disponible de Hocoma AG, Suiza); Sánchez y otros, 26), ARMin (Mihelj y otros, 26; Mihelj y otros, 27), y KINARM (Scott, 1999), entre otros. Los dispositivos robóticos de exoesqueleto tienen la ventaja del control directo sobre la función de unión del miembro, lo cual permite el control independiente de cada DOF del miembro. Esto asegura que los movimientos compensatorios por un sujeto pueden monitorearse y/o prevenirse. Un inconveniente de los dispositivos de exoesqueleto es que el acoplamiento de la conexión robótica al miembro del sujeto requiere la alineación de los ejes de la unión del miembro y la unión del robot correspondiente. Con los robots de exoesqueletos actuales, esto resulta en partes del robot que se localizan cerca del sujeto, lo cual puede ser intimidante para algunos sujetos.
Un inconveniente adicional de los dispositivos robóticos actuales es que no pueden ajustar la movilidad completa del miembro superior humano. Esto es particularmente cierto para el complejo del hombro puesto que tiene una disposición compacta de cinco grados de libertad principales (DOF): dos en la unión esternoclavicular y tres en la unión escapulohumeral. La unión escapulohumeral puede aproximarse como una unión esférica y se ha replicado en algunos dispositivos actuales. Sin embargo, la cintura del hombro se ha descuidado, a pesar de su importancia en la estabilización y orientación del miembro superior. Sin el control directo en la unión esternoclavicular, no es posible prevenir al sujeto de hacer movimientos compensatorios, ni existe una forma para apropiadamente recobrar fuerza y coordinación de la cintura del hombro.
La W24/58458 describe un aparato de interfaz de exoesqueleto que comprende cinco conexiones rígidas dispuestas en serie, capaces de girar recíprocamente en los extremos respectivos para monitorear los movimientos angulares del brazo, del antebrazo y la muñeca de un usuario y que tiene en la punta un mango para acoplar con el usuario que refleja una realimentación de la fuerza.
Resumen de la invención
Un aspecto de la invención se refiere a un exoesqueleto robótico, que comprende: conexión mecánica que se acopla a una unión seleccionada de un miembro de un sujeto, la conexión mecánica que incluye al menos una unión que tiene articulación alrededor de un eje; y un medio de sujeción del miembro para sujetar el miembro a la conexión mecánica; en donde la conexión mecánica del exoesqueleto no se localiza en, o a lo largo de un eje de la unión seleccionada del miembro.
La conexión mecánica puede definir una unión virtual en un punto no localizado en la conexión mecánica; y la unión virtual puede acoplarse a la unión seleccionada del miembro cuando el miembro se sujeta a la conexión mecánica.
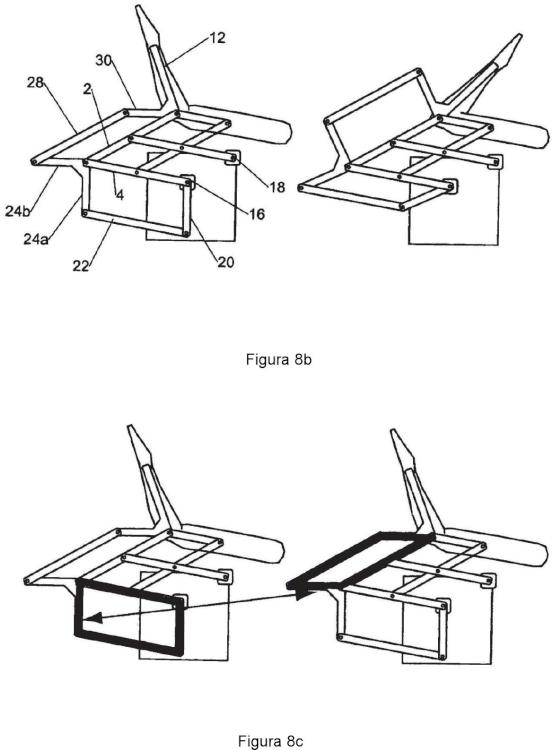
En una modalidad, la conexión mecánica puede comprender una pluralidad de conexiones interconectadas para la articulación entre ellas de manera que definen dos estructuras de paralelogramo, las dos estructuras de paralelogramo que comparten al menos porciones de dos conexiones, dicho paralelogramo que tiene un lado virtual definido entre dos esquinas, las dos esquinas fijas al suelo.
En otra modalidad, la conexión mecánica puede comprender dos o más conexiones sólidas y al menos un cable.
En otra modalidad, la conexión mecánica puede comprender una pista curva con una curvatura circular; un carro asociado con la pista curva; y una o más de: (i) dos o más conexiones interconectadas para la articulación entre ellas y conectadas en un punto al carro; (ii) al menos un cable conectado en un punto al carro y al menos en un punto a la pista; y (iii) un medio asociado con el carro para accionar y/o resistir el movimiento del carro en la pista.
La conexión mecánica puede comprender además al menos un motor para mover la conexión mecánica y/o resistir el movimiento de la conexión mecánica mediante los cables.
El exoesqueleto robótico puede acoplarse a unas primera y segunda uniones del miembro del sujeto; en donde la conexión mecánica del exoesqueleto no se localiza en, o a lo largo de un eje de la primera unión del miembro. El exoesqueleto puede proporcionar dos grados de libertad (DOF), un DOF por cada una de las primera y segunda uniones del miembro.
El exoesqueleto robótico puede acoplarse a unas primera, segunda y tercera uniones del miembro del sujeto; en donde la conexión mecánica del exoesqueleto no se localiza en, o a lo largo de un eje de la primera unión del miembro. El exoesqueleto robótico puede proporcionar tres grados de libertad (DOF), un DOF por cada una de las primera, segunda y tercera uniones del miembro.
La articulación del exoesqueleto puede estar dentro de un plano.
El miembro puede ser un brazo o una pierna. La unión seleccionada puede ser la unión esternoclavicular, la unión escapulohumeral, el codo, la muñeca, la cadera, la rodilla, o el tobillo.
En otra modalidad el exoesqueleto se acopla a las primera, segunda y tercera uniones del miembro del sujeto y proporciona hasta seis grados de libertad (DOF), dos DOF por la primera unión del miembro, tres DOF por la segunda unión del miembro, y un DOF por la tercera unión del miembro; en donde la conexión mecánica del exoesqueleto no se localiza en, o a lo largo de uno o más de los ejes de la primera unión del miembro. El exoesqueleto puede ajustarse para su movimiento solamente dentro de un plano.
En otra modalidad, el exoesqueleto se acopla a las primera, segunda, tercera y cuarta uniones del miembro del sujeto y proporciona dos DOF por la primera unión del miembro, tres DOF por la segunda unión del miembro, y uno o dos DOF por la tercera unión del miembro, y uno, dos o tres DOF por la cuarta unión del miembro; en donde la conexión mecánica del exoesqueleto no se localiza en, o a lo largo de uno o más de los ejes de la primera unión del miembro.
El miembro puede ser el brazo, en donde las primera y segunda uniones pueden ser las uniones esternoclavicular y escapulohumeral del hombro, y las tercera y cuarta uniones pueden ser el codo y la muñeca.
El exoesqueleto robótico puede comprender además un medio para obtener datos con respecto a la posición angular, momento, y/o aceleración de al menos una de las uniones o las conexiones de la conexión mecánica.
Al menos una porción de la conexión mecánica... [Seguir leyendo]
Reivindicaciones:
1. Un exoesqueleto robótico (1), que comprende:
una primera conexión mecánica adaptada para acoplarse a una primera unión seleccionada de un miembro de un sujeto, la primera conexión mecánica que incluye conexiones para dicho acoplamiento a la primera unión seleccionada, con al menos una unión que tiene articulación alrededor de un eje; y
medio de sujeción del miembro para sujetar el miembro a la conexión;
en donde la primera conexión mecánica define una unión virtual (1, 11, 12) que tiene un eje que no se localiza en la conexión mecánica;
en donde la unión virtual (1, 11, 12) se acopla a la primera unión seleccionada del miembro cuando el miembro se sujeta a la conexión;
en donde la primera conexión mecánica no se localiza en, o a lo largo de un eje de la primera unión seleccionada del miembro cuando la primera unión seleccionada se acopla a la unión virtual (1, 11, 12);
en donde la primera conexión mecánica incluye una segunda unión que no se localiza en un eje de la primera unión seleccionada del miembro cuando la primera unión seleccionada se acopla a la unión virtual (1, 11, 12); y
en donde la primera conexión mecánica incluye conexiones que acoplan la cinemática y cinética de la unión virtual (1, 11, 12) a la segunda unión de la primera conexión mecánica.
2. El exoesqueleto robótico (1) de la reivindicación 1, en donde la primera conexión mecánica comprende una pluralidad de conexiones interconectadas para la articulación entre ellas de manera que definen dos estructuras de cuatro barras, las dos estructuras de cuatro barras que comparten al menos porciones de dos conexiones, una dicha estructura de cuatro barras que tiene una conexión virtual definida entre dos esquinas, las dos esquinas fijas al suelo; u opcionalmente
en donde al menos una de las estructuras de cuatro barras es un paralelogramo.
3. El exoesqueleto robótico (1) de la reivindicación 1, que comprende además:
una segunda conexión mecánica adaptada para acoplarse a una segunda unión seleccionada del miembro del sujeto, la segunda conexión mecánica que incluye conexiones para dicho acoplamiento a la segunda unión seleccionada, con al menos una unión que tiene articulación alrededor de un eje;
en donde una unión de la segunda conexión mecánica se localiza en, o a lo largo de un eje de la segunda unión seleccionada del miembro.
4. El exoesqueleto robótico (1) de la reivindicación 3, que comprende además:
una tercera conexión mecánica adaptada para acoplarse a una tercera unión seleccionada del miembro del sujeto, la tercera conexión mecánica que incluye conexiones para dicho acoplamiento a la tercera unión seleccionada, con al menos una unión que tiene articulación alrededor de un eje; en donde una unión de la tercera conexión mecánica se localiza en, o a lo largo de un eje de la tercera unión seleccionada del miembro.
5. El exoesqueleto robótico (1) de la reivindicación 3 o 4, en donde la articulación del exoesqueleto (1) está dentro de un plano.
6. El exoesqueleto robótico (1) de la reivindicación 1, que comprende además:
una segunda conexión mecánica adaptada para acoplarse a la primera unión seleccionada del miembro del sujeto, las primera y segunda conexiones mecánicas que proporcionan dos grados de libertad a la primera unión seleccionada; o
una segunda conexión mecánica adaptada para acoplarse a la primera unión seleccionada del miembro del sujeto, y una tercera conexión mecánica que se acopla a la primera unión seleccionada del miembro del sujeto, las primera, segunda y tercera conexiones mecánicas que proporcionan tres grados de libertad a la primera unión seleccionada;
en donde la segunda conexión mecánica incluye conexiones para dicho acoplamiento a la primera unión seleccionada y que tiene articulación alrededor de un eje que corresponde a un segundo eje de rotación de la primera unión seleccionada del miembro; y
en donde la tercera conexión mecánica incluye conexiones para dicho acoplamiento a la primera unión seleccionada y que tiene articulación alrededor de un eje que corresponde a un tercer eje de rotación de la primera unión seleccionada del miembro.
7. El exoesqueleto robótico (1) de la reivindicación 6, que comprende además una de:
(i) una tercera conexión mecánica adaptada para acoplarse a una segunda unión seleccionada del miembro del sujeto;
(¡i) una tercera conexión mecánica adaptada para acoplarse a una segunda unión seleccionada del miembro del sujeto y una cuarta conexión mecánica adaptada para acoplarse a la segunda unión seleccionada del miembro del sujeto, las tercera y cuarta conexiones mecánicas que proporcionan dos grados de libertad a la segunda unión seleccionada; y
(iii) una tercera conexión mecánica adaptada para acoplarse a una segunda unión seleccionada del miembro del sujeto, una cuarta conexión mecánica adaptada para acoplarse a la segunda unión seleccionada del miembro del sujeto, y una quinta conexión mecánica adaptada para acoplarse a la segunda unión seleccionada del miembro del sujeto, las tercera, cuarta y quinta conexiones mecánicas que proporcionan tres grados de libertad a la segunda unión seleccionada;
en donde la segunda conexión mecánica incluye conexiones para dicho acoplamiento a la primera unión seleccionada y que tiene articulación alrededor de un eje que corresponde a un segundo eje de rotación de la primera unión seleccionada del miembro;
en donde la tercera conexión mecánica incluye conexiones para dicho acoplamiento a la segunda unión seleccionada y que tiene articulación alrededor de un eje que corresponde a un primer eje de rotación de la segunda unión seleccionada del miembro;
en donde la cuarta conexión mecánica incluye conexiones para dicho acoplamiento a la segunda unión seleccionada y que tiene articulación alrededor de un eje que corresponde a un segundo eje de rotación de la segunda unión seleccionada del miembro; y
en donde la quinta conexión mecánica Incluye conexiones para dicho acoplamiento a la segunda unión seleccionada y que tiene articulación alrededor de un eje que corresponde a un tercer eje de rotación de la segunda unión seleccionada del miembro.
8. El exoesqueleto robótico (1) de la reivindicación 7, que comprende además:
una sexta conexión mecánica adaptada para acoplarse a una tercera unión seleccionada del miembro del sujeto;
en donde la sexta conexión mecánica incluye conexiones para dicho acoplamiento a la tercera unión seleccionada y que tiene articulación alrededor de un eje que corresponde a un eje de rotación de la tercera unión seleccionada del miembro.
9. El exoesqueleto robótico (1) de la reivindicación 1, 3 o 4, en donde al menos una conexión mecánica comprende una pista curva, un carro asociado con la pista curva, y dos o más conexiones interconectadas para la articulación entre ellas y conectadas en un punto al carro y en otro punto a una localización fija con relación a la pista curva; u opcionalmente
en donde dos o más conexiones mecánicas comparten una o más conexiones.
1. El exoesqueleto robótico (1) de la reivindicación 7, en donde al menos una de la primera conexión mecánica, la segunda conexión mecánica, la tercera conexión mecánica, la cuarta conexión mecánica, y la quinta conexión mecánica comprende una pista curva, un carro asociado con la pista curva, y dos o más conexiones Interconectadas para la articulación entre ellas y conectadas en un punto al carro y en otro punto a una localización fija con relación a la pista curva; u opclonalmente
en donde dos o más de la primera conexión mecánica, la segunda conexión mecánica, la tercera conexión mecánica, la cuarta conexión mecánica, y la quinta conexión mecánica comparten una o más conexiones.
11. El exoesqueleto robótico (1) de la reivindicación 1, que comprende además un medio para obtener datos con respecto a la posición angular, momento, y/o aceleración de al menos una de las uniones o las conexiones de la conexión mecánica.
12. El exoesqueleto robótico (1) de la reivindicación 6, en donde el exoesqueleto (1) puede configurarse para su movimiento solamente dentro de un plano.
13. El exoesqueleto robótico (1) de la reivindicación 1, que comprende además:
una segunda conexión mecánica adaptada para acoplarse a una segunda unión seleccionada del miembro del sujeto, la segunda conexión mecánica que incluye al menos dos conexiones para dicho acoplamiento a la segunda unión seleccionada y que tiene articulación alrededor de un segundo eje que corresponde a un eje de rotación de la segunda unión seleccionada del miembro; en donde el segundo eje de rotación de la segunda conexión mecánica es sustancialmente colineal con el eje de rotación de la segunda unión seleccionada del miembro;
en donde un tercer eje de rotación de la segunda conexión mecánica es sustancialmente colineal con un eje de rotación de una tercera unión seleccionada del miembro, la tercera unión seleccionada del miembro que es la siguiente unión la cual es distal o proximal a la segunda unión seleccionada del miembro; y
en donde una distancia entre los segundo y tercer ejes de rotación de la segunda conexión mecánica es variable y el desempeño apropiado de la segunda conexión mecánica se mantiene sin ajustar la longitud de las conexiones de la segunda conexión mecánica.
14. Un método para evaluar, estudiar o diagnosticar un déficit en la función senso-motriz de un miembro de un sujeto, que comprende:
sujetar el exoesqueleto robótico (1) de cualquiera de las reivindicaciones de la 1 a la 13 al miembro de un sujeto;
obtener datos en relación con la posición angular, momento, y/o aceleración de al menos una unión o conexión de la conexión mecánica, los datos que corresponde a la posición angular, momento, y/o aceleración de una o más uniones del miembro;
comparar los datos obtenidos con los datos de individuos normales y saludables o con datos de control para evaluar, estudiar, o diagnosticar un déficit en la función senso-motriz del miembro del sujeto.
Patentes similares o relacionadas:
PROCEDIMIENTO Y DISPOSITIVO DE REGISTRO AUTOMÁTICO DE LA LOCOMOCIÓN DE NEMATODOS U ORGANISMOS PEQUEÑOS DE TAMAÑOS SIMILARES POR INTERFEROMETRÍA TEMPORAL DE MICROHACES DE LUZ, del 23 de Julio de 2020, de PHYLUMTECH S.A: Procedimiento y dispositivo de registro automático de la locomoción de nematodos u organismos pequeños de tamaños similares por interferometría temporal de microhaces […]
DISPOSITIVO PARA EVITAR EPISODIOS DE APNEA EN INFANTES, del 11 de Junio de 2020, de PONTIFICIA UNIVERSIDAD CATÓLICA DE CHILE: Dispositivo para evitar episodios de apnea en infantes, que simula un patrón de respiración adecuado para sincronizar la respiración del infante y que […]
Control electrofisiológico de contracciones uterinas, del 10 de Junio de 2020, de Nemo Healthcare B.V: Un dispositivo de procesamiento de señales para procesar señales electrofisiológicas relacionadas con contracciones uterinas de una mujer […]
Estímulo terapéutico mejorado para un sistema de entrañado de succión no nutritiva, del 10 de Junio de 2020, de Innara Health, Inc: Un sistema de procesamiento codificado con una aplicación para estimular un CPG y un nervio trigémino en un cerebro humano, influyendo […]
Aparato y método para la evaluación automática del transcurso de una sesión de entrenamiento, del 3 de Junio de 2020, de FRAUNHOFER-GESELLSCHAFT ZUR FORDERUNG DER ANGEWANDTEN FORSCHUNG E.V.: Procedimiento para la valoración automática de un transcurso de un ejercicio de entrenamiento, que comprende: proporcionar una pluralidad de informaciones […]
 Procedimiento y aparato para determinar información indicativa de disfunciones cardíacas, del 29 de Abril de 2020, de Precordior Oy: Un aparato que comprende:
- una interfaz de señal para recibir una primera señal indicativa de movimiento cardiovascular y medida con un elemento […]
Procedimiento y aparato para determinar información indicativa de disfunciones cardíacas, del 29 de Abril de 2020, de Precordior Oy: Un aparato que comprende:
- una interfaz de señal para recibir una primera señal indicativa de movimiento cardiovascular y medida con un elemento […]
Sistema y método para determinar el sueño y las fases de sueño de una persona, del 22 de Abril de 2020, de V-Watch SA: Un sistema para determinar la transición de fase de sueño de una persona, el sistema que comprende: medios de detección de la frecuencia cardíaca […]
Sistema para restaurar la función muscular de la columna lumbar, del 25 de Marzo de 2020, de Mainstay Medical Limited: Un sistema para recuperar la función muscular de la columna lumbar, el sistema que comprende: uno o más electrodos configurados […]