Aparato para transferir automáticamente productos farmacéuticos envasados.
Aparato para transferir automáticamente productos farmacéuticos envasados,
en un almacén que comprende al menos un organizador (10a, 10b) de tipo estantería, incluyendo el aparato:
un carril (21) que se extiende en una dirección longitudinal horizontal a lo largo de dicho organizador (10a, 10b) de tipo estantería,
una columna vertical (20) montada de manera deslizable a lo largo del carril (21) y acoplada a medios (22, 23) de 10 accionamiento longitudinal para controlar el movimiento de la columna (20) a lo largo del carril,
un primer soporte (32a, 33a) montado de manera deslizable a lo largo de la columna (20) y asociado con unos primeros medios de accionamiento vertical para controlar el movimiento del primer soporte a lo largo de la columna (20),
un primer dispositivo (30a) de agarre, montado en el primer soporte (32a, 33a) y asociado con unos primeros medios (34a, 35a, 36a) de accionamiento transversal para efectuar movimientos lineales controlados en direcciones transversales horizontales con el fin de desplazar un producto farmacéutico hasta un estante o extraer un producto farmacéutico de un estante,
un segundo soporte (32b, 33b) montado de manera deslizable a lo largo de dicha columna (20) y asociado con unos segundos medios de accionamiento vertical para controlar el movimiento del segundo soporte a lo largo de la columna (20) de manera independiente con respecto al movimiento del primer soporte,
un segundo dispositivo (30b) de agarre, montado en el segundo soporte y asociado con unos segundos medios de accionamiento transversal para efectuar movimientos lineales controlados, en direcciones transversales horizontales de manera independiente con respecto al movimiento del primer dispositivo de agarre, con el fin de desplazar un producto farmacéutico hasta un estante o extraer un producto farmacéutico de un estante;
caracterizado porque:
cada dispositivo (30a, 30b) de agarre está asociado con una respectiva mesa horizontal (31a, 31b) montada giratoriamente en uno de dichos soportes alrededor de un respectivo eje vertical y controlado para el giro por un respectivo motor (37a, 37b) con el fin de llevar la mesa cerca o lejos de los bordes de los estantes, y
porque el aparato comprende además al menos un transportador (40a, 40b) accionado por motor que se extiende longitudinalmente y paralelo al carril (21), con el fin de transferir hasta una tolva los productos que los dispositivos (30a, 30b) de agarre extraen del organizador (10a, 10b) de tipo estantería.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E11150868.
Solicitante: BERTERO TECHNOLOGIES S.A.S. DI BERTERO SEBASTIANO.
Inventor/es: Bertero,Sebastiano.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B65G1/04 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65G DISPOSITIVOS DE TRANSPORTE O ALMACENAJE, p. ej. TRANSPORTADORES PARA CARGAR O BASCULAR, SISTEMAS TRANSPORTADORES PARA TALLERES O TRANSPORTADORES NEUMATICOS DE TUBOS (embalajes B65B; manipulación de material delgado o filiforme, p. ej. hojas de papel o fibras B65H; grúas B66C; aparatos de elevación o arrastre,p. ej. montacargas, B66D; dispositivos para elevar o bajar mercancías para carga y descarga, p. ej. carretillas elevadoras, B66F 9/00; vaciado de botellas, jarras, latas, barricas, barriles o contendores similares, no previstos en otro lugar, B67C 9/00; distribución o trasvase de líquidos B67D; llenado o descarga de contenedores para gases licuados, solidificados o comprimidos F17C; sistemas de conducción para fluídos F17D). › B65G 1/00 Almacenamiento de objetos, individualmente o con un cierto orden, en almacenes o depósitos (combinaciones de transportadores en almacenes, tiendas o talleres, B65G 37/00; apilado de objetos B65G 57/00; sacado de objetos de pilas B65G 59/00; máquinas de carga B65G 65/02). › mecánicos.
PDF original: ES-2417880_T3.pdf
Fragmento de la descripción:
Aparato para transferir automáticamente productos farmacéuticos envasados La presente invención se refiere a aparatos para transferir automáticamente productos farmacéuticos envasados de acuerdo con la reivindicación 1.
En los almacenes de las farmacias modernas, se hace uso de autómatas cartesianos (también conocidos como alimentadores de organizador de tipo estantería) que se mueven en un pasillo entre dos organizadores de tipo estantería paralelos enfrentados en los que están almacenados productos farmacéuticos de una manera ordenada en posiciones predeterminadas que están grabadas en una base de datos informatizada. Los datos sobre las existencias se actualizan en tiempo real a medida que se reciben productos encargados por la farmacia y a medida que se venden productos. El autómata transfiere automáticamente productos farmacéuticos individuales desde una ubicación de entrada, a donde llegan los productos de uno en uno desde de que han sido clasificados, hasta las posiciones predeterminadas en los organizadores de tipo estantería. Cuando el sistema informatizado recibe un encargo del farmacéutico para recoger un producto que se va a vender, el autómata recoge el producto pedido de la ubicación en la que está almacenado y lo envía a una ubicación de salida, generalmente en la parte superior de una tolva, desde donde el producto viaja hasta el farmacéutico que lo ha pedido. Se pueden proporcionar un cierto número de ubicaciones de salida para el mismo número de tolvas que transportan los productos a diferentes áreas de la farmacia o del mostrador de venta.
El autómata (o alimentador de organizador de tipo estantería) comprende generalmente una columna vertical montada de manera deslizable a lo largo de un carril fijado al suelo del pasillo entre los dos organizadores de tipo estantería. Una mesa horizontal asociada con un dispositivo de agarre, habitualmente de tipo succión o prensión,
está montada de una manera verticalmente deslizable a lo largo de la columna. La mesa puede girar 180º alrededor de un eje vertical, junto con el dispositivo de agarre, con el fin de moverse hacia los bordes de los organizadores de tipo estantería a uno u otro lado del pasillo central. El dispositivo de agarre efectúa un movimiento horizontal de extensión o repliegue para trasladar o extraer el producto desde la mesa hasta el estante o viceversa, según se pueda requerir.
Se requiere que los autómatas de manipulador entreguen los productos pedidos por el farmacéutico lo más rápidamente posible, especialmente cuando la farmacia está llena. Con el fin de acortar el tiempo de entrega, se ha hecho uso de almacenes que tienen cada uno tres organizadores de tipo estantería paralelos, separados por dos pasillos, con un correspondiente alimentador de organizador de tipo estantería funcionando en cada pasillo.
El aparato para transferir productos envasados como se define en el preámbulo de la reivindicación 1 es conocido a partir del documento FR 2158399 A1.
Un objeto primordial de la invención es optimizar el espacio disponible en un almacén, con el fin de reducir las dimensiones globales del almacén y/o aumentar el número de productos farmacéuticos diferentes que se pueden almacenar en cualquier almacén dado. Otro objeto de la invención es proporcionar un aparato para transferir productos farmacéuticos envasados que sea particularmente rápido. Otro objeto de la invención es reducir los costes asociados con la energía consumida para el movimiento del alimentador de organizador de tipo estantería.
Estos y otros objetos y ventajas, que quedarán más claros más adelante, se consiguen de acuerdo con la invención mediante un aparato que tiene los rasgos de las reivindicaciones anexas.
Una realización preferida pero no limitativa de un aparato de acuerdo con la invención se describirá ahora, y se ilustra esquemáticamente en los dibujos adjuntos, en los que:
la figura 1 es una vista frontal de un aparato de acuerdo con la invención, posicionado en un pasillo entre dos organizadores de tipo estantería;
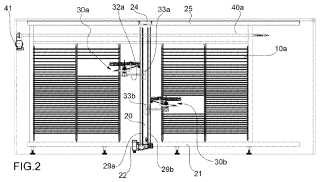
la figura 2 es una vista lateral del aparato de la figura 1 y de uno de los organizadores de tipo estantería; algunas 55 partes del organizador de tipo estantería se han omitido con fines ilustrativos;
la figura 3 es una vista en planta del aparato y de los organizadores de tipo estantería de la figura 1;
la figura 4 es una vista a escala ampliada de parte del aparato de la figura 1;
la figura 5 es una vista parcial a escala ampliada de la figura 2;
la figura 6 es una vista parcial a escala ampliada de la figura 3;
las figuras 7 y 8 son vistas en perspectiva, desde ángulos diferentes, de la parte inferior de una columna vertical que forma parte del aparato; y
las figuras 9 y 10 son vistas en perspectiva de los dispositivos de agarre del aparato de acuerdo con la invención.
Haciendo referencia inicialmente a las figuras 1 a 3, los números 10a y 10b indican dos organizadores de tipo estantería paralelos del almacén de una farmacia, separados por un pasillo central 11. Un autómata cartesiano o alimentador de organizador está instalado en el pasillo, y comprende una columna vertical 20 cuyo pie está montado de una manera longitudinalmente deslizable a lo largo de un carril 21 de guía y de soporte que discurre ligeramente por encima del suelo del pasillo 11.
En la realización ilustrada, el movimiento, definido aquí como longitudinal, de la columna 20 a lo largo del carril 21 es proporcionado por un motor eléctrico 22 montado en la parte inferior de la columna. De una manera conocida en si misma, el motor 22 acciona un engranaje 23 (figura 1) que engrana con una correa dentada fija (no mostrada en detalle) que discurre paralela al carril 21. El funcionamiento del motor eléctrico 22 está controlado por un codificador absoluto (no mostrado en detalle) acoplado al engranaje 23. Con el fin de estabilizar la columna 20, la parte superior
de la columna lleva un carro o cursor 24 que se aplica a un carril elevado 25 paralelo al carril 21. Con el fin de mantener vertical la columna 20 cuando se acelera a lo largo del carril 21, es preferible impartir este movimiento de traslación asimismo a la parte superior de la columna. A tal fin se proporciona un árbol vertical 42 de transmisión, paralelo a la columna 20. El árbol 42 transfiere el movimiento de accionamiento giratorio desde el engranaje 23 hasta otro engranaje (no mostrado) , superior, que engrana con una correa fija paralela al carril elevado 25.
Dos dispositivos 30a, 30b de agarre, controlables independientemente uno de otro, están montados de una manera verticalmente deslizable a lo largo de la columna 20. Cada dispositivo de agarre, que no difieren apreciablemente de los de un tipo conocido, tiene una correspondiente mesa horizontal 31a, 31b sostenida sobresalientemente por un respectivo soporte que incluye un brazo horizontal 32a, 32b fijado a un cursor 33a, 33b. Estos cursores son deslizables a lo largo de respectivas guías verticales paralelas 29a, 29b fijadas a la columna 20. Los movimientos independientes de estos dos cursores son producidos, en la realización preferida, por respectivos motores eléctricos 26a, 26b que tienen cada uno un árbol de salida con un engranaje 27a, 27b fijado a un respectivo codificador. Cada uno de estos engranajes acciona un correspondiente sistema de transmisión para el movimiento vertical de las correas dentadas 28a, 28b a las que están asegurados los cursores 33a, 33b.
Cada mesa 31a, 31b, junto con el respectivo dispositivo 30a, 30b de agarre, puede girar 180º (o más) alrededor de un respectivo eje vertical que pasa a través del extremo libre del correspondiente brazo 32a, 32b de soporte. Estos movimientos giratorios son proporcionados por motores eléctricos adicionales 37a, 37b, asociados con cada mesa, para hacer que las mesas giren junto con sus dispositivos de agarre con el fin de llevar los bordes de las mesas hacia los estantes de uno u otro de los organizadores 10a, 10b de tipo estantería. Las posiciones angulares de cada mesa con el dispositivo asociado de agarre son detectadas por respectivos codificadores angulares.
Los dispositivos de agarre, que son preferiblemente de tipo succión, están controlados por medios de movimiento que pueden impartir movimientos lineales de extensión y de repliegue a los dispositivos en direcciones horizontales definidas aquí como “transversales”, con el fin de desplazar un producto desde la mesa hacia el estante o extraer un producto desde el estante y llevarlo hasta la mesa del alimentador de organizador. En la realización preferida ilustrada en los dibujos, estos medios de movimiento comprenden generalmente motores eléctricos... [Seguir leyendo]
Reivindicaciones:
1. Aparato para transferir automáticamente productos farmacéuticos envasados, en un almacén que comprende al menos un organizador (10a, 10b) de tipo estantería, incluyendo el aparato:
un carril (21) que se extiende en una dirección longitudinal horizontal a lo largo de dicho organizador (10a, 10b) de tipo estantería,
una columna vertical (20) montada de manera deslizable a lo largo del carril (21) y acoplada a medios (22, 23) de 10 accionamiento longitudinal para controlar el movimiento de la columna (20) a lo largo del carril,
un primer soporte (32a, 33a) montado de manera deslizable a lo largo de la columna (20) y asociado con unos primeros medios de accionamiento vertical para controlar el movimiento del primer soporte a lo largo de la columna (20) ,
un primer dispositivo (30a) de agarre, montado en el primer soporte (32a, 33a) y asociado con unos primeros medios (34a, 35a, 36a) de accionamiento transversal para efectuar movimientos lineales controlados en direcciones transversales horizontales con el fin de desplazar un producto farmacéutico hasta un estante o extraer un producto farmacéutico de un estante,
un segundo soporte (32b, 33b) montado de manera deslizable a lo largo de dicha columna (20) y asociado con unos segundos medios de accionamiento vertical para controlar el movimiento del segundo soporte a lo largo de la columna (20) de manera independiente con respecto al movimiento del primer soporte,
un segundo dispositivo (30b) de agarre, montado en el segundo soporte y asociado con unos segundos medios de accionamiento transversal para efectuar movimientos lineales controlados, en direcciones transversales horizontales de manera independiente con respecto al movimiento del primer dispositivo de agarre, con el fin de desplazar un producto farmacéutico hasta un estante o extraer un producto farmacéutico de un estante;
caracterizado porque:
cada dispositivo (30a, 30b) de agarre está asociado con una respectiva mesa horizontal (31a, 31b) montada giratoriamente en uno de dichos soportes alrededor de un respectivo eje vertical y controlado para el giro por un respectivo motor (37a, 37b) con el fin de llevar la mesa cerca o lejos de los bordes de los estantes, y
porque el aparato comprende además al menos un transportador (40a, 40b) accionado por motor que se extiende longitudinalmente y paralelo al carril (21) , con el fin de transferir hasta una tolva los productos que los dispositivos (30a, 30b) de agarre extraen del organizador (10a, 10b) de tipo estantería.
2. Aparato de acuerdo con la reivindicación 1, caracterizado porque cada uno de dichos soportes incluye un brazo horizontal (32a, 32b) fijado a un cursor (33a, 33b) , siendo estos cursores deslizables a lo largo de respectivas guías verticales paralelas (29a, 29b) aseguradas a la columna (20) .
3. Aparato de acuerdo con la reivindicación 1, caracterizado porque el transportador (40a, 40b) está situado en la 45 parte superior del organizador (10a, 10b) de tipo estantería.
4. Aparato de acuerdo con la reivindicación 1 o 3, caracterizado porque el transportador (40a, 40b) se extiende a lo largo de toda la longitud de un organizador (10a, 10b) de tipo estantería.
5. Aparato de acuerdo con la reivindicación 3 o 4, caracterizado porque comprende dos transportadores (40a, 40b) accionados por motor montados, cada uno, por encima de uno respectivo de dos organizadores (10a, 10b) de tipo estantería paralelos.
6. Aparato de acuerdo con una cualquiera de las reivindicaciones anteriores, caracterizado porque los dispositivos 55 (30a, 30b) de agarre son dispositivos de agarre de succión.
7. Aparato de acuerdo con una cualquiera de las reivindicaciones anteriores, caracterizado porque cada dispositivo (30a, 30b) de agarre es giratorio junto con la mesa horizontal asociada (31a, 31b) alrededor de dichos respectivos ejes verticales.
Patentes similares o relacionadas:
Sistema de vías con nodos de intercomunicación dispuestos en la vertical y los vehículos con doble sistema de sustentación que discurren por ellas, del 27 de Julio de 2020, de RUIZ DE LARA REDONDO, José Antonio: Sistema de vías con nodos de intercomunicación dispuestos en la vertical y los vehículos con doble sistema de sustentación que discurren por ellas, capaces de trasladarse […]
Sistema de almacenamiento en estantería con realimentación de energía, del 1 de Julio de 2020, de KNAPP LOGISTIK AUTOMATION GMBH: Sistema de almacenamiento en estantería con al menos dos unidades de estantería (1a-1d), presentando cada unidad de estantería un dispositivo […]
Sistema de preparación para la expedición con un robot de transporte para pasar por debajo de estanterías individuales y carros de transporte, del 13 de Mayo de 2020, de KNAPP AG: Sistema de preparación para la expedición para preparar para la expedición artículos almacenados en un almacén con estanterías en bolsas de transporte con […]
Dispositivo para transferencia de artículos e instalación para transporte de artículos, del 6 de Mayo de 2020, de DAIFUKU CO., LTD.: Dispositivo para transferencia de artículos (2B, 2C) configurado para desplazar un artículo (W) a lo largo de una dirección de transferencia (Y) […]
Procedimiento de recogida de objetos con robots lanzadera, del 22 de Abril de 2020, de SOLYSTIC: Procedimiento de procesamiento de objetos en un centro logístico que comprende una zona de almacenaje de los objetos dividida en segmentos de almacenaje adyacentes […]
Procedimiento y dispositivo para el almacenamiento y recuperación o reubicación de contenedores en almacenes de gran altura, del 4 de Marzo de 2020, de AMOVA GmbH: Procedimiento para almacenar y recuperar o reubicar contenedores en almacenes de gran altura de una instalación de transbordo, […]
Dispositivo lanzadera de almacén, y sistemas y métodos que lo incorporan, del 4 de Marzo de 2020, de Majied, Fadi Mohammad Majed Hussain Abdel: Sistema para desplazar palés que comprende: una rejilla rectangular que comprende carriles laterales orientados a lo largo de un eje x y carriles ortogonales […]
Sistema de preparación para la expedición de artículos para la preparación de pedidos y de lotes, del 19 de Febrero de 2020, de KNAPP AG: Sistema de preparación para la expedición para preparar para la expedición artículos desde contenedores de almacenamiento en contenedores […]