UNOS PERFECCIONAMIENTOS EN LAS HERRAMIENTAS SERVOACCIONADAS, PARA EL APRIETE DE TUERCAS.
Solicitante: N-S-W CORP.
Fecha de Solicitud: 27 de Julio de 1972.
Fecha de Publicación: .
Fecha de Concesión: 16 de Noviembre de 1974.
Clasificación Internacional de Patentes:
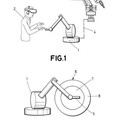
- B25J3/04 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 3/00 Manipuladores del tipo control dominado, es decir, manipuladores en los que la unidad de control y la unidad controlada ejecutan movimientos correspondientes en el espacio. › dotados de servomecanismos (cabezas servocontroladas en sí B25J 15/02).
Patentes similares o relacionadas:
 MÉTODO DE GUIADO DE DISPOSITIVOS ROBÓTICOS TELEOPERADOS PARA ALTERNAR MODO DE CONTROL EN POSICIÓN Y MODO DE CONTROL EN VELOCIDAD, del 2 de Agosto de 2013, de UNIVERSIDAD POLITECNICA DE MADRID: Método de guiado de dispositivos robóticos teleoperados para alternar modo de control en posición y modo de control en velocidad, que comprende la adaptación del dispositivo […]
MÉTODO DE GUIADO DE DISPOSITIVOS ROBÓTICOS TELEOPERADOS PARA ALTERNAR MODO DE CONTROL EN POSICIÓN Y MODO DE CONTROL EN VELOCIDAD, del 2 de Agosto de 2013, de UNIVERSIDAD POLITECNICA DE MADRID: Método de guiado de dispositivos robóticos teleoperados para alternar modo de control en posición y modo de control en velocidad, que comprende la adaptación del dispositivo […]
 MÉTODO DE GUIADO DE DISPOSITIVOS ROBÓTICOS TELEOPERADOS, del 4 de Julio de 2013, de UNIVERSIDAD POLITECNICA DE MADRID: Método de guiado de dispositivos robóticos teleoperados para alternar modo de control en posición y modo de control en velocidad, que comprende […]
MÉTODO DE GUIADO DE DISPOSITIVOS ROBÓTICOS TELEOPERADOS, del 4 de Julio de 2013, de UNIVERSIDAD POLITECNICA DE MADRID: Método de guiado de dispositivos robóticos teleoperados para alternar modo de control en posición y modo de control en velocidad, que comprende […]
SISTEMA DE CONTROL ANTI-COLISION PARA UN MANIPULADOR CONTROLABLE DE FORMA MULTI-AXIAL., del 1 de Mayo de 1999, de PLOEM, SVEN: SE PRESENTA UN SISTEMA DE CONTROL LIBRE DE COLISIONES PARA UN MANIPULADOR MULTIAXIALMENTE CONTROLABLE , QUE COMPRENDE ESENCIALMENTE UNOS BRAZOS DE SOPORTE INTERCONECTADOS […]
 BRAZO DE TELEMANIPULACION EN DOS PARTES, del 16 de Noviembre de 2008, de COMMISSARIAT A L'ENERGIE ATOMIQUE
AREVA NC: Brazo de telemanipulación, que comprende un brazo maestro manejado por un operador, un brazo esclavo que comprende un primer segmento […]
BRAZO DE TELEMANIPULACION EN DOS PARTES, del 16 de Noviembre de 2008, de COMMISSARIAT A L'ENERGIE ATOMIQUE
AREVA NC: Brazo de telemanipulación, que comprende un brazo maestro manejado por un operador, un brazo esclavo que comprende un primer segmento […]
 METODO DE TELEMANIPULACION POR TELEPRESENCIA, del 16 de Diciembre de 2007, de SRI INTERNATIONAL: EN UN SISTEMA DE TELEMANIPULACION PARA MANIPULAR OBJETOS EN UN LUGAR DE TRABAJO SITUADO UN ESPACIO REMOTO POR UN OPERADOR , COMO PUEDE SER UN SISTEMA QUIRURGICO […]
METODO DE TELEMANIPULACION POR TELEPRESENCIA, del 16 de Diciembre de 2007, de SRI INTERNATIONAL: EN UN SISTEMA DE TELEMANIPULACION PARA MANIPULAR OBJETOS EN UN LUGAR DE TRABAJO SITUADO UN ESPACIO REMOTO POR UN OPERADOR , COMO PUEDE SER UN SISTEMA QUIRURGICO […]