Un vehículo de manejo de materiales que tiene un aparato de control para variar el límite de velocidad de un motor de dirección.
Un vehículo de manejo de materiales que comprende:
un bastidor (20) que comprende un compartimiento del operador (30);
las ruedas (58, 74) soportadas en dicho bastidor (20);
un motor de tracción (72) acoplado a una de dichas ruedas (58) para llevar a cabo la rotación de dicha una rueda (58);
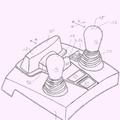
un sistema de dirección por cable (80) asociado con una rueda de dirección (74) para llevar a cabo el movimiento angular de dicha rueda de dirección (74) alrededor de un primer eje, dicho sistema de dirección por cable (80) que comprende:
una palanca de control (90) capaz de ser movido por un operador; un motor de dirección (120) acoplado a dicha rueda de dirección (74) para llevar a cabo el movimiento angular de dicha rueda de dirección (74) alrededor del primer eje; el aparato de control (200) acoplado a dicho motor de dirección (120) para generar una primera señal de accionamiento a dicho motor de dirección (120) para llevar a cabo el movimiento angular de dicha rueda de dirección (74) alrededor del primer eje y acoplado a dicho motor de tracción (72) para generar una segunda señal de accionamiento a dicha tracción el motor (72) para controlar su velocidad; caracterizado porque dicho aparato de control (200) varía dicha primera señal de accionamiento a dicho motor de dirección (120) como una función de la velocidad de dicho motor de tracción (72) a fin de variar un límite de velocidad de dicho motor de dirección (120) .
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E12187324.
Solicitante: CROWN EQUIPMENT CORPORATION.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 40 South Washington Street New Bremen, OH 45869 ESTADOS UNIDOS DE AMERICA.
Inventor/es: WETTERER,GEORGE ROBERT, SCHLOEMER,JAMES FRANCIS, CRABILL,MONTY L, JENSEN,ERIC L.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B66F9/075 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B66 ELEVACION; LEVANTAMIENTO; REMOLCADO. › B66F ELEVACION, LEVANTAMIENTO, REMOLQUE O EMPUJE, NO PREVISTOS EN OTRO LUGAR, p. ej. DISPOSITIVOS CUYA FUERZA DE LEVANTAMIENTO O EMPUJE SE APLICA DIRECTAMENTE SOBRE LA SUPERFICIE DE LA CARGA (montaje de islas artificiales sobre pilotes o soportes similares E02B 17/00; andamiajes combinados con aparatos de elevación E04G 1/22, E04G 3/28; dispositivos de elevación para encofrados deslizantes E04G 11/24; sobreelevación de edificios E04G 23/06; puntales o tirantes E04G 25/00; elevadores u otros dispositivos de elevación de escaleras E06C 7/12; puntales para minería E21D 15/00). › B66F 9/00 Dispositivos para elevación o descenso de mercancías voluminosas o pesadas con fines de carga o descarga (ascensores móviles o transportables instalados o asociados a edificios, especialmente adaptados para permitir la transferencia de una a otra parte del edificio u otra construcción B66B 9/16; grúas B66C). › Características o detalles de estructura.
- B66F9/20 B66F 9/00 […] › Medios para accionar o controlar los mástiles, las plataformas o las horquillas (toma de fuerza de la transmisión del vehículo en combinación con el sistema de propulsión del mismo B60K).
- B66F9/24 B66F 9/00 […] › Dispositivos o sistemas eléctricos.
PDF original: ES-2462527_T3.pdf
Fragmento de la descripción:
Un vehículo de manejo de materiales que tiene un aparato de control para variar el límite de velocidad de un motor de dirección
Campo técnico
La presente invención se refiere a un vehículo de manejo de materiales que tiene un sistema de dirección que incluye un dispositivo de realimentación táctil.
Arte anterior
La patente de Estados Unidos núm. 6, 564, 897 describe un sistema de dirección por cable para un vehículo de manejo de materiales. El vehículo comprende una caña de dirección. La caña, sin embargo, no se acopla mecánicamente a un volante de dirección. Un motor o un freno electromagnético se usa para proporcionar una fuerza de resistencia en contra de la dirección.
Descripción de la invención De acuerdo con un ejemplo útil para entender la presente invención, se describe un vehículo de manejo de materiales que comprende: un bastidor que comprende un compartimiento del operador y un sensor capaz de generar una señal indicativa de un operador que entra al compartimiento del operador; las ruedas soportadas en el bastidor; un motor de tracción acoplado a una de las ruedas para llevar a cabo la rotación de la una de las ruedas; y un sistema de dirección por cable asociado con una rueda de dirección para llevar a cabo el movimiento angular de la rueda de dirección alrededor de un primer eje. El sistema de dirección por cable comprende: una palanca de control capaz de ser movida por un operador para definir una señal de control de dirección correspondiente a una posición angular deseada de la rueda de dirección; un dispositivo de realimentación táctil asociado con la palanca de control para generar una fuerza contraria sobre la palanca de control que varía en base a una señal del dispositivo de realimentación táctil variable; y un motor de dirección acoplado a la rueda de dirección para llevar a cabo el movimiento angular de la rueda de dirección alrededor del primer eje. El vehículo puede comprender además un aparato de control acoplado al sensor para recibir la señal desde el sensor indicativo de un operador que entra al compartimiento del operador, acoplado a la palanca de control para recibir la señal de control de dirección, acoplado al motor de dirección para generar una primera señal de accionamiento en el motor de dirección en respuesta a la señal de control de dirección de la palanca de control para llevar a cabo el movimiento angular de la rueda de dirección alrededor del primer eje, acoplado al motor de tracción para generar una segunda señal de accionamiento en el motor de tracción, y acoplado al dispositivo de realimentación táctil para generar la señal del dispositivo de realimentación táctil. El aparato de control puede aumentar la señal del dispositivo de realimentación táctil en respuesta a un operador que entra al compartimiento del operador para impedir que un operador haga una solicitud de giro rápido a través de la palanca de control.
El aparato de control puede variar la primera señal de accionamiento en el motor de dirección a fin de aumentar gradualmente una velocidad en la cual el motor de dirección se hace funcionar después que el operador entra en el compartimiento del operador.
El aparato de control puede aumentar la señal del dispositivo de realimentación táctil para un período predefinido de tiempo en respuesta al operador que entra al compartimiento del operador.
La rueda de dirección es capaz de ser movida a una posición angular dentro de un primer intervalo angular cuando un operador se localiza dentro del compartimiento del operador y es capaz de ser movida a una posición angular dentro de un segundo intervalo angular que es menor que el primer intervalo angular cuando un operador se localiza fuera del compartimiento del operador.
De acuerdo con la presente invención, se proporciona un vehículo de manejo de materiales que comprende: un bastidor que comprende un compartimiento del operador; ruedas soportadas en el bastidor; un motor de tracción acoplado a una de las ruedas para llevar a cabo la rotación de la una de las ruedas; y un sistema de dirección por cable asociado con una rueda de dirección para llevar a cabo el movimiento angular de la rueda de dirección alrededor de un primer eje. El sistema de dirección por cable comprende una palanca de control capaz de ser movida por un operador y un motor de dirección acoplado a la rueda de dirección para llevar a cabo el movimiento angular de la rueda de dirección alrededor del primer eje. El vehículo puede comprender además el aparato de control acoplado al motor de dirección para generar una primera señal de accionamiento en el motor de dirección para llevar a cabo el movimiento angular de la rueda de dirección alrededor del primer eje y acoplado al motor de tracción para generar una segunda señal de accionamiento en el motor de tracción para controlar su velocidad. El aparato de control puede variar la primera señal de accionamiento en el motor de dirección como una función de la velocidad del motor de tracción a fin de variar un límite de velocidad del motor de dirección.
El aparato de control puede variar la primera señal de accionamiento en el motor de dirección más allá de una velocidad del motor de tracción predefinido a fin de reducir el límite de velocidad del motor de dirección a medida que aumenta la velocidad del motor de tracción.
El vehículo puede comprender además horquillas. El aparato de control puede reducir un valor de la primera señal de accionamiento en el motor de dirección cuando el vehículo se acciona en una primera dirección de las horquillas.
De acuerdo con un ejemplo adicional útil para entender la presente invención, se describe un vehículo de manejo de materiales que comprende un bastidor que comprende un compartimiento del operador y un sensor capaz de generar una señal indicativa de un operador que sale del compartimiento del operador, ruedas soportadas en el bastidor, al menos una de las ruedas que es una rueda de dirección, y un sistema de dirección por cable asociado con la rueda de dirección para llevar a cabo el movimiento angular de la rueda de dirección alrededor de un primer eje. El sistema de dirección por cable comprende: una palanca de control capaz de ser movida por un operador para generar una señal de control de dirección correspondiente a una posición angular deseada de la rueda de dirección; estructura de retención asociada con la palanca de control para presionar la palanca de control hacia una posición centrada correspondiente a la rueda de dirección que se posiciona en una posición recta; un dispositivo de realimentación táctil asociado con la palanca de control para generar una fuerza contraria a una fuerza aplicada por el operador en la palanca de control cuya fuerza contraria varía en base a una señal del dispositivo de realimentación táctil variable; y un motor de dirección acoplado a la rueda de dirección para llevar a cabo el movimiento angular de la rueda de dirección alrededor del primer eje. El vehículo comprende además un aparato de control acoplado al sensor para recibir la señal desde el sensor indicativo de un operador que sale del compartimiento del operador, acoplado a la palanca de control para recibir la señal de control de dirección, acoplado al motor de dirección para generar una primera señal de accionamiento en el motor de dirección en respuesta a la señal de control de dirección de la palanca de control para llevar a cabo el movimiento angular de la rueda de dirección alrededor del primer eje, y acoplado al dispositivo de realimentación táctil para generar la señal del dispositivo de realimentación táctil. La rueda de dirección es capaz de ser movida a una posición angular dentro de un primer intervalo angular cuando un operador se localiza dentro del compartimiento del operador y es capaz de ser movida a una posición angular dentro de un segundo intervalo angular que es menor que el primer intervalo angular cuando un operador se localiza fuera del compartimiento del operador.
El vehículo puede comprender además un motor de tracción acoplado a la rueda de dirección para llevar a cabo la rotación de la rueda de dirección alrededor de un segundo eje sustancialmente transversal al primer eje. El aparato de control se puede acoplar al motor de tracción y limitar una velocidad del motor de tracción como una función de una posición angular deseada de la rueda de dirección.
El aparato de control puede variar la señal del dispositivo de realimentación táctil como una función de la velocidad del motor de tracción.
El aparato de control puede variar además la señal del dispositivo de realimentación táctil como una función de un error entre una posición... [Seguir leyendo]
Reivindicaciones:
1. Un vehículo de manejo de materiales que comprende:
un bastidor (20) que comprende un compartimiento del operador (30) ; las ruedas (58, 74) soportadas en dicho bastidor (20) ; un motor de tracción (72) acoplado a una de dichas ruedas (58) para llevar a cabo la rotación de dicha una rueda (58) ; un sistema de dirección por cable (80) asociado con una rueda de dirección (74) para llevar a cabo el movimiento angular de dicha rueda de dirección (74) alrededor de un primer eje, dicho sistema de dirección por cable (80) que comprende:
una palanca de control (90) capaz de ser movido por un operador; un motor de dirección (120) acoplado a dicha rueda de dirección (74) para llevar a cabo el movimiento angular de dicha rueda de dirección (74) alrededor del primer eje; el aparato de control (200) acoplado a dicho motor de dirección (120) para generar una primera señal de accionamiento a dicho motor de dirección (120) para llevar a cabo el movimiento angular de dicha rueda de dirección (74) alrededor del primer eje y acoplado a dicho motor de tracción (72) para generar una segunda señal de accionamiento a dicha tracción el motor (72) para controlar su velocidad; caracterizado porque dicho aparato de control (200) varía dicha primera señal de accionamiento a dicho motor de dirección (120) como una función de la velocidad de dicho motor de tracción (72) a fin de variar un límite de velocidad de dicho motor de dirección (120) .
2. El vehículo de manejo de materiales tal como se establece en la reivindicación 1, en donde dicho aparato de control (200) varía dicha primera señal de accionamiento a dicho motor de dirección (120) más allá de una velocidad del motor de tracción predefinido a fin de reducir el límite de velocidad de dicho motor de dirección (120) de manera que dicha velocidad de dicho motor de tracción (120) aumenta.
3. El vehículo de manejo de materiales tal como se establece en la reivindicación 1, que comprende además las horquillas (60A, 60B) , dicho aparato de control (200) que reduce un valor de dicha primera señal de accionamiento a dicho motor de dirección (120) cuando dicho vehículo se acciona en una primera dirección de las horquillas.
4. Un vehículo de manejo de materiales tal como se establece en la reivindicación 1, en donde dicha una rueda
(58) y dicha rueda de dirección (74) comprenden la misma rueda.
5. El vehículo de manejo de materiales tal como se establece en la reivindicación 1, en donde la rotación de la rueda de dirección (74) está alrededor de un segundo eje sustancialmente transversal al primer eje, y el aparato de control (200) se coloca para limitar una velocidad del motor de tracción (72) como una función de una posición angular deseada de la rueda de dirección (74) .
iNiciO
DETERMiNAR
TºDc x ºAcTOR DE REDUcciON ºTºDS
Patentes similares o relacionadas:
Vehículo guiado automático, del 23 de Mayo de 2019, de BALYO: Un vehículo guiado automático que comprende: - un carro de horquilla con al menos una horquilla de soporte de carga , - un sistema de accionamiento de […]
Dispositivo de elevación para elevar un vehículo que comprende uno o más dispositivos de elevación y un sistema, y método de liberación del mismo, del 12 de Abril de 2019, de STERTIL B.V.: Un sistema de elevación para elevar un vehículo que comprende uno o más dispositivos de elevación, comprendiendo el sistema: - una estructura con […]
Dispositivo para la manipulación/traslado de palets de carga, del 2 de Abril de 2018, de MARGALEF MASIA, Juan Carlos: Dispositivo para la manipulación de palets constituido por un bastidor vertical, fijable a la zona posterior de los medios de elevación de un dispositivo, […]
Vehículo de elevación, del 1 de Febrero de 2017, de MERLO PROJECT S.R.L.: Vehículo de elevación, que comprende: - un bastidor que tiene una porción (12a) de bastidor delantera y una porción (12b) de bastidor trasera, - […]
 Elemento de mando para un vehículo industrial, del 20 de Enero de 2016, de JUNGHEINRICH AKTIENGESELLSCHAFT: Elemento de mando para un vehículo industrial con dos palancas de mando y al menos un interruptor dispuesto entre las palancas […]
Elemento de mando para un vehículo industrial, del 20 de Enero de 2016, de JUNGHEINRICH AKTIENGESELLSCHAFT: Elemento de mando para un vehículo industrial con dos palancas de mando y al menos un interruptor dispuesto entre las palancas […]
Dispositivo sensor, dispositivo de ajuste y aparato de trabajo, del 9 de Octubre de 2013, de DEERE & COMPANY: Máquina de trabajo, especialmente un vehículo de trabajo preferentemente autopropulsado, con un brazo deextensión y con un dispositivo sensor para […]
UNIDAD DE BARRA DE TRACCIÓN PARA UN CARRITO DE FÁBRICA CONDUCIDO MEDIANTE LA BARRA DE TRACCIÓN, del 8 de Febrero de 2012, de JUNGHEINRICH AKTIENGESELLSCHAFT: Unidad de barra de tracción para un carrito de fábrica conducido mediante la barra de tracción en el que la cabeza de la barra de tracción está acoplada con un eje de dirección […]
 SUMINISTRO ELÉCTRICO PARA UNA CARRETILLA INDUSTRIAL, del 11 de Abril de 2011, de JUNGHEINRICH AKTIENGESELLSCHAFT: Suministro eléctrico para una carretilla industrial, en particular para una carretilla industrial mandada por lanza, - una conexión de gran amperaje […]
SUMINISTRO ELÉCTRICO PARA UNA CARRETILLA INDUSTRIAL, del 11 de Abril de 2011, de JUNGHEINRICH AKTIENGESELLSCHAFT: Suministro eléctrico para una carretilla industrial, en particular para una carretilla industrial mandada por lanza, - una conexión de gran amperaje […]