HERRAMIENTA AUTOMATICA SERVOCONTROLADA NIVELADA APLOMADA.
Un nivel óptico que comprende:
un conjunto óptico (62) para generar al menos un rayo (64) de luz visible,
incluyendo el conjunto óptico unas clavijas (65) de soporte;
una plataforma (66) que incluye unas cunas en las que se insertan las clavijas de soporte para soportar el conjunto óptico;
un mecanismo de oscilación por relajación proporcionado por las clavijas de soporte y las cunas que soportan el conjunto óptico para que gire con al menos un grado de libertad sobre las clavijas de soporte, en el cual la adherencia estática entre las clavijas de soporte y las cunas puede mantener al conjunto óptico en su sitio incluso cuando la plataforma se inclina con respecto al nivel;
al menos un actuador (63) dispuesto para provocar el movimiento del conjunto óptico aplicando un par suficiente para que el conjunto óptico supere la adherencia estática del mecanismo de oscilación por relajación permitiendo al conjunto óptico girar sobre las clavijas de soporte hasta una posición a nivel;
un sensor (80) para proporcionar señales que puedan usarse para determinar si la plataforma está a nivel; y un circuito de control para recibir las señales desde el sensor y activar controladamente el al menos un actuador para superar la adherencia estática del mecanismo de oscilación por relajación e inclinar el conjunto óptico hacia el nivel para que el al menos un rayo de luz visible esté sustancialmente a nivel
Tipo: Resumen de patente/invención. Número de Solicitud: W0238563US.
Solicitante: ROBERT BOSCH COMPANY LIMITED.
Nacionalidad solicitante: China.
Dirección: 21ST FLOOR KING'S ROAD 625 VRC,HONG KONG.
Inventor/es: TACKLIND, CHRISTOPHER, A., DOLGONOSOV,ZINOVY.
Fecha de Publicación: .
Fecha Concesión Europea: 7 de Octubre de 2009.
Clasificación Internacional de Patentes:
- G01C15/00A
Clasificación PCT:
- G01C15/00 FISICA. › G01 METROLOGIA; ENSAYOS. › G01C MEDIDA DE DISTANCIAS, NIVELES O RUMBOS; TOPOGRAFIA; NAVEGACION; INSTRUMENTOS GIROSCOPICOS; FOTOGRAMETRIA O VIDEOGRAMETRIA (medida del nivel de líquidos G01F; radio navegación, determinación de la distancia o velocidad mediante la utilización de efectos de propagación, p. ej. efecto Doppler, tiempo de propagación, de ondas de radio, disposiciones análogas que utilicen otras ondas G01S). › Instrumentos o accesorios topográficos no previstos en los grupos G01C 1/00 - G01C 13/00.
Clasificación antigua:
- G01C15/00 G01C […] › Instrumentos o accesorios topográficos no previstos en los grupos G01C 1/00 - G01C 13/00.
Fragmento de la descripción:
Herramienta automática servocontrolada nivelada aplomada.
Campo de la técnica
La invención aquí descrita se refiere generalmente a herramientas de alineación que generan rayos de alineación ópticos. Más particularmente, se describen mecanismos de nivelación mejorados para nivelar automáticamente el rayo o los rayos.
Antecedentes
Una variedad de herramientas de verificación y carpintería han empleado láseres anteriormente. Las primeras herramientas láser de alineación eran niveladas manualmente como se describe en la Patente Estadounidense Nº 3.897.637 y en la Patente Estadounidense Nº 3.279.070. Posteriormente, se emplearon instrumentos autonivelantes para mejorar la precisión y la fiabilidad.
En un tipo de instrumento de nivelación, se suspende un láser completo mediante un péndulo y se nivela con la gravedad. Por ejemplo, en la Patente Estadounidense Nº 3.771.876 se cuelgan un rayo láser He-Ne y un chasis mediante un soporte flexible para crear un rayo de plomada que posteriormente es dirigido hacia el plano horizontal usando un pentaprisma. La Fig. 1 de este documento muestra dicho sistema, con el láser 4 colgado mediante un cable 2 por encima de un pentaprisma 10. El rayo sale por una ventana 14, mientras que un motor 16 gira el pentaprisma 10. La oscilación pendular del láser 4 se amortigua con un imán 12. Se han usado fluidos viscosos para amortiguar las oscilaciones en acercamientos alternativos.
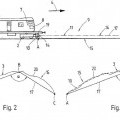
En la Patente Estadounidense Nº 5.184.406 se describe otro sistema de nivelación por láser y se muestra en la Fig. 2. Se monta un conjunto 22 de láser y diodo sobre un flotador 26, que es sustentado por un líquido 28 en un recipiente 24. El rayo láser permanece aplomado a pesar de la inclinación del recipiente. En otro acercamiento mostrado en la Fig. 3, la Patente Estadounidense Nº 5.144.487 usa un péndulo con rodamiento a bolas. La plataforma 23 está suspendida de un pivote 25 con rodamiento a bolas dentro de una carcasa 29. Un conjunto óptico dentro de la plataforma 23 genera múltiples rayos láser colimados 21 para la alineación. Unas corrientes parásitas inducidas por el imán 27 amortiguan el movimiento de la plataforma. El uso de varios rodamientos a bolas hace que el instrumento sea caro, grande, y de precisión y robustez limitadas.
En otro acercamiento distinto, se monta rígidamente un láser en una carcasa del aparato y se usa un medio de compensación (típicamente, dispositivos de lente) para corregir la inclinación de la carcasa. Por ejemplo, en la Patente Estadounidense Nº 3.684.381, una ventana superior 34 y una carcasa 35 (representada en la Fig. 4) contienen una fina película de aceite 36. Esta fina película de aceite 36 se usa para crear un prisma corrector que dirige el rayo láser descendente 32 en la dirección de la plomada. El prisma de aceite se forma con el nivel superior del aceite 36 que está nivelado y una ventana inferior 38 que está inclinada. Se monta una fuente de láser en una carcasa 30 de láser. Este sistema sólo es preciso cuando se usan las dos células con aceite con un índice de refracción de 1,5000. Este sistema ha demostrado ser inadecuado debido a la ausencia de un fluido que tenga las propiedades deseadas por encima del rango de temperatura normal. Adicionalmente, el menisco de la película de aceite 36 en los bordes de la cámara contribuye a errores de frente de onda. En el sistema de la Fig. 4, un pentaprisma 40 (que típicamente está girando) dirige el rayo de plomada sobre un plano horizontal.
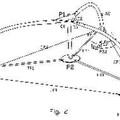
Se han desarrollado varios procedimientos para compensar la inclinación de un rayo láser usando cables. Por ejemplo, en la Patente estadounidense Nº 4.221.483 una lente pendular cuelga por debajo de un diodo láser. Según se inclina la carcasa, el movimiento de la lente por la gravedad es proporcional al ángulo de inclinación, que conduce el rayo de plomada hacia la posición de plomada. De nuevo un pentaprisma convierte el rayo láser al plano horizontal. En un sistema descrito en las Patentes estadounidenses Nos. 4.852.265 y 4.912.851 y mostrados en la Fig. 5, un rayo láser 41 es reflejado por un espejo 43 sobre una plataforma 46 que está suspendida de un único cable 44. El rayo láser 42 reflejado es compensado por la inclinación de la plataforma bajo la fuerza de la gravedad. La longitud y el diámetro del cable se eligen de modo que cuando la carcasa del aparato se inclina exactamente un grado, la plataforma se inclina exactamente medio grado. Debido a la relación de dos a uno entre la inclinación del espejo y la corrección del rayo, el rayo láser se restablece en su dirección de plomada después de haberse inclinado. Estas patentes también muestran diodos láser montados en voladizos que responden a la inclinación de la carcasa para corregir el rayo de salida.
El documento EP-0895057 describe un compensador de eje óptico. Un contenedor hermético tiene un líquido transparente sellado en el mismo para formar una superficie líquida libre. Una unidad compensadora de eje óptico permite que un rayo láser pase a través del contenedor hermético con un ángulo predeterminado y puede llevar a cabo una compensación del eje óptico basada en los cambios de un eje óptico de salida en función del cambio angular de dicha superficie líquida libre con respecto a un eje óptico incidente. Un mecanismo de inclinación puede inclinar dicha unidad de compensación del eje óptico. Un medio detector de inclinación puede detectar la inclinación de la unidad de compensación del eje óptico. Una unidad de control puede accionar el mecanismo de inclinación de acuerdo a una detección de inclinación por el medio detector de inclinación, y nivela la unidad de compensación del eje óptico, y la unidad de compensación del eje óptico compensa un ángulo de inclinación del eje óptico.
Todas las técnicas y aparatos de nivelación por láser anteriormente mencionados sufren limitaciones de precisión, problemas de robustez, y/o el coste de los componentes. En particular, los dispositivos que precisan péndulos requieren costosas juntas de baja fricción para permitir un libre movimiento del láser. Estos péndulos de baja fricción están sujetos a oscilaciones (al más mínimo toque) que precisan un largo tiempo para estabilizarse. Como resultado, tales dispositivos pendulares requieren mecanismos de amortiguación caros y difíciles de perfeccionar para superar los problemas de oscilación. Lo que se necesita es un procedimiento y un aparato para superar éstas y otras dificultades con un dispositivo de nivelación láser de relativo bajo coste.
De acuerdo con los principios de la presente invención, se describen un aparato y un procedimiento para lograr la nivelación de un rayo.
Un primer aspecto de la invención proporciona un nivel óptico que comprende: un conjunto óptico para generar al menos un rayo láser visible, incluyendo el conjunto óptico unas clavijas de soporte; una plataforma que incluye unas cunas en las que se insertan las clavijas de soporte para soportar el conjunto óptico; un mecanismo de "oscilación por relajación" (slip-stick) proporcionado por las clavijas de soporte y las cunas que soportan pivotalmente el conjunto óptico para su rotación con al menos un grado de libertad sobre las clavijas de soporte, en el cual la adherencia estática entre las clavijas de soporte y las cunas puede mantener el conjunto óptico en su sitio incluso cuando se inclina la plataforma con respecto al nivel; al menos un actuador dispuesto para provocar movimiento del conjunto óptico al suministrar al conjunto óptico un par suficiente para superar la adherencia estática del mecanismo de "oscilación por relajación" permitiendo al conjunto óptico girar sobre las clavijas de soporte hasta una posición de nivel; un sensor para proporcionar señales que pueden usarse para determinar si la plataforma está a nivel; y unos circuitos de control para recibir señales desde el sensor y activar controladamente el al menos un actuador para superar la adherencia estática del mecanismo de "oscilación por relajación" e inclinar el conjunto óptico hacia el nivel de tal modo que el al menos un rayo láser visible esté sustancialmente a nivel.
Un segundo aspecto de la invención proporciona un procedimiento para proyectar un rayo de luz visible en la dirección del nivel o de la plomada, pese a la condición inclinada de un conjunto óptico, que comprende: (a) montar un conjunto óptico mediante la inserción de unas clavijas de soporte en unas cunas de una plataforma, proporcionando las clavijas de soporte y las cunas un mecanismo de "oscilación por relajación" que soporta pivotalmente el conjunto óptico...
Reivindicaciones:
1. Un nivel óptico que comprende:
un conjunto óptico (62) para generar al menos un rayo (64) de luz visible, incluyendo el conjunto óptico unas clavijas (65) de soporte;
una plataforma (66) que incluye unas cunas en las que se insertan las clavijas de soporte para soportar el conjunto óptico;
un mecanismo de oscilación por relajación proporcionado por las clavijas de soporte y las cunas que soportan el conjunto óptico para que gire con al menos un grado de libertad sobre las clavijas de soporte, en el cual la adherencia estática entre las clavijas de soporte y las cunas puede mantener al conjunto óptico en su sitio incluso cuando la plataforma se inclina con respecto al nivel;
al menos un actuador (63) dispuesto para provocar el movimiento del conjunto óptico aplicando un par suficiente para que el conjunto óptico supere la adherencia estática del mecanismo de "oscilación por relajación" permitiendo al conjunto óptico girar sobre las clavijas de soporte hasta una posición a nivel;
un sensor (80) para proporcionar señales que puedan usarse para determinar si la plataforma está a nivel; y un circuito de control para recibir las señales desde el sensor y activar controladamente el al menos un actuador para superar la adherencia estática del mecanismo de oscilación por relajación e inclinar el conjunto óptico hacia el nivel para que el al menos un rayo de luz visible esté sustancialmente a nivel.
2. El nivel óptico de la Reivindicación 1 en el cual el sensor (80) comprende:
una fuente (133) de luz para producir un rayo (134) de luz detectora;
un nivel (132) de burbuja de dos ejes alineado con el rayo de luz de manera que cuando el nivel de burbuja de dos ejes está nivelado, el rayo de luz también está a nivel;
un detector (131) de luz sensible a la posición que es sensible al rayo de luz detectora; y
estando dispuesta la fuente (133) de luz para proyectar el rayo (134) de luz detectora a través del nivel (132) de burbuja de dos ejes hacia el detector de luz sensible a la posición para que el detector pueda determinar si el nivel de burbuja de dos ejes está nivelado.
3. El nivel óptico de la Reivindicación 2 en el cual el rayo de luz detectora es dirigido hacia abajo a través del nivel de burbuja de dos ejes hacia el detector de luz sensible a la posición que está posicionado por debajo del nivel de burbuja de dos ejes.
4. El nivel óptico de la Reivindicación 2 en el cual el rayo de luz del detector es dirigido hacia arriba a través del nivel de burbuja de dos ejes hacia el detector de luz sensible a la posición que está posicionado por encima del nivel de burbuja de dos ejes.
5. El nivel óptico de la Reivindicación 2 en el cual el detector de luz sensible a la posición es un detector de cuadratura, un detector de dispositivo acoplado por carga, o un detector semiconductor complementario de óxido de metal.
6. El nivel óptico de la Reivindicación 1 en el cual el sensor (80) comprende:
un primer nivel de burbuja de un eje alineado para producir un rayo de luz que forme algún primer ángulo predeterminado con un primer eje cuando el nivel de burbuja de un eje esté nivelado con respecto al primer eje;
un segundo nivel de burbuja de un eje alineado para producir un rayo de luz que forme algún segundo ángulo predeterminado con un segundo eje cuando el segundo nivel de burbuja de un eje esté nivelado con respecto al segundo eje;
una primera fuente de luz y una segunda fuente de luz;
un primer detector de luz sensible a la posición y un segundo detector de luz sensible a la posición;
estando la primera fuente de luz posicionada para que proyecte un primer rayo detector a través del primer nivel de burbuja de un eje hacia el primer detector de luz sensible a la posición permitiéndole determinar si el primer nivel de burbuja de un eje está a nivel con respecto al primer eje; y
estando la segunda fuente de luz posicionada para que proyecte un segundo rayo detector a través del segundo nivel de burbuja de un eje hacia el segundo detector de luz sensible a la posición permitiéndole determinar si el segundo nivel de burbuja de un eje está a nivel con respecto al segundo eje.
7. El nivel óptico de la reivindicación 1 en el cual el sensor comprende:
un primer nivel de burbuja de un eje alineado con el rayo de luz de manera que cuando el primer nivel de burbuja de un eje está orientado con un primer ángulo predeterminado con respecto al primer eje, entonces el rayo de luz está a nivel con respecto al primer eje;
un segundo nivel de burbuja de un eje alineado con el rayo de luz de manera que cuando el segundo nivel de burbuja de un eje está orientado con un segundo ángulo predeterminado con respecto al segundo eje, entonces el rayo de luz está a nivel con respecto al segundo eje;
una primera fuente de luz y una segunda fuente de luz;
un primer detector de luz sensible a la posición y un segundo detector de luz sensible a la posición;
estando la primera fuente de luz posicionada de manera que proyecte un primer rayo del detector a través del primer nivel de burbuja de un eje hacia el primer detector de luz sensible a la posición de manera que éste pueda determinar si el primer nivel de burbuja de un eje está orientado con el primer ángulo predeterminado con respecto al primer eje; y estando la segunda fuente de luz posicionada de manera que proyecte un segundo rayo del detector a través del segundo nivel de burbuja de un eje hacia el segundo detector de luz sensible a la posición de manera que éste pueda determinar si el segundo nivel de burbuja de un eje está orientado con el segundo ángulo predeterminado con respecto al segundo eje.
8. El nivel óptico de la Reivindicación 1 en el cual el sensor comprende
un primer nivel de burbuja de un eje alineado con el rayo de luz de manera que cuando el primer nivel de burbuja de un eje está nivelado con respecto al primer eje, entonces el rayo de luz también está a nivel con respecto al primer eje;
un segundo nivel de burbuja de un eje alineado con el rayo de luz de manera que cuando el segundo nivel de burbuja de un eje está nivelado con respecto al segundo eje, entonces el rayo de luz también está a nivel con respecto al segundo eje;
una primera fuente de luz y una segunda fuente de luz;
un primer detector de luz sensible a la posición y un segundo detector de luz sensible a la posición;
estando la primera fuente de luz posicionada de manera que proyecte un primer rayo detector a través del primer nivel de burbuja de un eje hacia el primer detector de luz sensible a la posición permitiéndole determinar si la plataforma está a nivel con respecto al primer eje; y
estando la segunda fuente de luz posicionada de manera que proyecte un segundo rayo detector a través del segundo nivel de burbuja de un eje hacia el segundo detector de luz sensible a la posición permitiéndole determinar si la plataforma está a nivel con respecto al segundo eje.
9. El nivel óptico de la Reivindicación 8 en el cual el primer nivel de burbuja de un eje y el segundo nivel de burbuja de un eje están orientados sustancialmente a 90º entre sí.
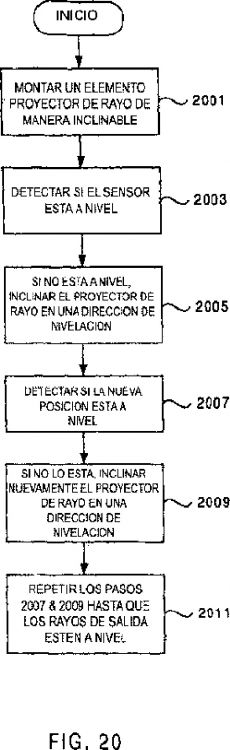
10. Un procedimiento para proyectar un rayo de luz visible en una dirección nivelada o aplomada, a pesar de una situación inclinada de un conjunto óptico, cuyo procedimiento comprende:
(a) montar (2001) un conjunto óptico mediante unas clavijas de soporte insertadas en las cunas de una plataforma, proporcionando las clavijas de soporte y las cunas un mecanismo de oscilación por relajación que soporta pivotalmente el conjunto óptico, y que puede mantener al mismo en una posición estacionaria por fricción entre las clavijas de soporte y las cunas, y en el cual el conjunto óptico puede inclinarse sobre dos ejes cuando es sometido a un par suficiente por un actuador y mantener su posición una vez que se ha retirado el par, permitiendo por lo tanto que el conjunto óptico se incline controladamente, siendo el conjunto óptico capaz de generar al menos un rayo de luz visible;
(b) detectar (2003) si el al menos un rayo de luz visible generado por el conjunto óptico está a nivel;
(c) aplicar un par mediante el actuador sobre el conjunto óptico suficiente para inclinar controladamente (2005) el conjunto óptico con un nuevo ángulo en el caso de que el al menos un rayo de luz visible generado por el conjunto óptico esté a nivel cuando el conjunto óptico esté en el nuevo ángulo;
(d) detectar (2007) si el al menos un rayo de luz visible generado por el conjunto óptico está a nivel cuando el conjunto óptico está con el nuevo ángulo;
(e) aplicar otro par sobre el conjunto óptico mediante el actuador suficiente para inclinar controladamente (2009) el conjunto óptico con otro ángulo si el nuevo ángulo es tal que el al menos un rayo de luz visible generado por el conjunto óptico no está a nivel; y
(f) repetir (2011) las operaciones de detectar e inclinar como en los pasos (d) y (e) hasta que el al menos un rayo de luz visible generado por el conjunto óptico esté a nivel.
11. El nivel óptico de la Reivindicación 10 en el cual la operación de detectar si el al menos un rayo de luz visible generado por el conjunto óptico está a nivel comprende:
proporcionar un nivel de burbuja de dos ejes alineado de manera que cuando esté nivelado, el al menos un rayo de luz visible generado por el conjunto óptico esté también a nivel;
proporcionar al menos un rayo de luz detectora para que sea proyectado a través de la burbuja de dos ejes;
proyectar el al menos un rayo de luz detectora a través del nivel de burbuja de dos ejes hacia el detector de luz; y
detectar, con dichos rayo de luz detectora y detector de luz sensible a la posición, si el al menos un rayo de luz visible generado por el conjunto óptico está a nivel.
Patentes similares o relacionadas:
 PLATAFORMA DE FONDO SUBMARINO CONFIGURABLE PARA MEDICIONES DIVERSAS, CON OPCIÓN DE CONTROL REMOTO, Y MODOS CAUTIVO O LIBRE, del 25 de Enero de 2012, de ARREDONDO DIEZ, JOSE FRANCISCO: Plataforma de fondo submarino configurable para mediciones diversas, con opción de control remoto, y modos cautivo o libre, consistente en una base […]
PLATAFORMA DE FONDO SUBMARINO CONFIGURABLE PARA MEDICIONES DIVERSAS, CON OPCIÓN DE CONTROL REMOTO, Y MODOS CAUTIVO O LIBRE, del 25 de Enero de 2012, de ARREDONDO DIEZ, JOSE FRANCISCO: Plataforma de fondo submarino configurable para mediciones diversas, con opción de control remoto, y modos cautivo o libre, consistente en una base […]
 PROCEDIMIENJTO PARA LA MEDICIÓN DE UNA POSICIÓN DE VÍA, del 19 de Mayo de 2011, de FRANZ PLASSER BAHNBAUMASCHINEN- INDUSTRIEGESELLSCHAFT M.B.H.: Procedimiento para la medición de una posición de vía, que es registrada con relación a una cuerda larga formada por un rayo láser como recta de […]
PROCEDIMIENJTO PARA LA MEDICIÓN DE UNA POSICIÓN DE VÍA, del 19 de Mayo de 2011, de FRANZ PLASSER BAHNBAUMASCHINEN- INDUSTRIEGESELLSCHAFT M.B.H.: Procedimiento para la medición de una posición de vía, que es registrada con relación a una cuerda larga formada por un rayo láser como recta de […]
DERIVADOS DE PIRIDINA Y PIRIMIDINA COMO ANTAGONISTAS DEL mGluR2, del 30 de Marzo de 2011, de F. HOFFMANN-LA ROCHE AG: Un compuesto de fórmula (I): en el queuno de entre X o Y es N y el otro es CH, o ambos X e Y son N; Q es S, O, -CH=N- o -N=CH-; A es arilo o un heteroarilo […]
 EQUIPO MEDIDOR DE DISTANCIA, del 1 de Febrero de 2011, de ROBERT BOSCH GMBH: Equipo medidor de distancia para la medición de distancias sin contacto, particularmente un equipo de mano, con una carcasa que presenta una superficie […]
EQUIPO MEDIDOR DE DISTANCIA, del 1 de Febrero de 2011, de ROBERT BOSCH GMBH: Equipo medidor de distancia para la medición de distancias sin contacto, particularmente un equipo de mano, con una carcasa que presenta una superficie […]
 DISPOSICIÓN DE MEDICIÓN, del 21 de Enero de 2011, de STABILA-MESSGERATE GUSTAV ULLRICH GMBH: Disposición de medición que comprende un aparato de medición como un aparato de medición láser con una carcasa , que está unida de forma desmontable a un trípode […]
DISPOSICIÓN DE MEDICIÓN, del 21 de Enero de 2011, de STABILA-MESSGERATE GUSTAV ULLRICH GMBH: Disposición de medición que comprende un aparato de medición como un aparato de medición láser con una carcasa , que está unida de forma desmontable a un trípode […]
 INSTRUMENTO DE MEDICION DEL METRAJE DE SUPERFICIES, del 13 de Noviembre de 2009, de MEASURIX: Procedimiento de medición de la extensión superficial de superficies planas poligonales en el espacio, en el cual:
- se utiliza un dispositivo […]
INSTRUMENTO DE MEDICION DEL METRAJE DE SUPERFICIES, del 13 de Noviembre de 2009, de MEASURIX: Procedimiento de medición de la extensión superficial de superficies planas poligonales en el espacio, en el cual:
- se utiliza un dispositivo […]
Nivel láser con soporte ajustable, del 22 de Julio de 2020, de KAPRO INDUSTRIES LTD.: Un nivel láser para ser colocado sobre una superficie de referencia horizontal, comprendiendo el nivel láser: (a) un cuerpo de nivel láser para proyectar […]
APARATO ASISTENTE DE LA ESTACIÓN TOTAL PARA LA MEDICIÓN CON OBSTÁCULOS, APLICADO A TOPOGRAFÍA, del 4 de Junio de 2020, de GÓMEZ PALACIO, Sergio: La presente invención se refiere a un dispositivo o aparato asistente de la estación total en topografía, el cual es usado para la medición con obstáculos, […]