SISTEMA DE NAVEGACION QUIRURGICO PARA REALIZAR UNA CAVIDAD DE RECEPCION PARA UN ACETABULO.
Sistema de navegación quirúrgico para una herramienta (25) navegada para realizar una cavidad de recepción para un acetábulo en un hueso pélvico (6) navegado,
con un instrumento palpador (9) navegado y con un dispositivo de procesamiento de datos (4) para procesar los datos de posición de las piezas navegadas, caracterizado porque el dispositivo de procesamiento de datos (4) está programado de tal forma que a partir de los datos de posición de un punto de gota de lágrima (17) (figura de lágrima según Köhler) en el hueso pélvico (6), determinados con la ayuda del instrumento palpador (9) navegado, a partir de los datos de posición del plano de entrada (16) de la pelvis y a partir de los datos de posición de las dos espinas ilíacas anterosuperiores (13, 14) del hueso pélvico (6), determina un plano de gota de lágrima (19) que se extiende a través del punto de gota de lágrima (17) y que es perpendicular respecto al plano de entrada (16) de la pelvis y paralelo respecto a una línea que une las dos espinas ilíacas anterosuperiores (13, 14), porque a una altura predefinida encima del plano de gota de lágrima (19) determina un punto de referencia (24, 24') en una posición predefinida en la dirección anteroposterior y a una distancia predefinida con respecto a la superficie exterior del hueso pélvico (6) en la dirección lateromedial, porque usando los datos de posición de un acetábulo secundario desplazado en la dirección craneal con respecto al acetábulo primario calcula la altura del punto de referencia (24, 24') encima del plano de gota de lágrima (19) de tal forma que no se exceda un valor máximo de la distancia entre la altura del punto de referencia (24, 24') y el acetábulo secundario, y porque calcula la posición de la herramienta (25) con respecto al hueso pélvico (6) y con respecto al punto de referencia (24, 24')
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2006/005181.
Solicitante: AESCULAP AG.
Nacionalidad solicitante: Alemania.
Dirección: AM AESCULAP-PLATZ,78532 TUTTLINGEN.
Inventor/es: FRIEDRICH, DIRK, LEITNER, FRANCOIS, MOLLARD,BENOIT, KAMMERZELL,SERGEJ.
Fecha de Publicación: .
Fecha Concesión Europea: 7 de Julio de 2010.
Clasificación Internacional de Patentes:
- A61B17/17S2C
- A61B19/00N
- A61B19/00N6T
- A61B5/103R
Clasificación PCT:
- A61B19/00
- A61B5/103 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61B DIAGNOSTICO; CIRUGIA; IDENTIFICACION (análisis de material biológico G01N, p.ej. G01N 33/48). › A61B 5/00 Medidas encaminadas a establecer un diagnóstico (diagnóstico por medio de radiaciones A61B 6/00; diagnóstico por ondas ultrasónicas, sónicas o infrasónicas A61B 8/00 ); Identificación de individuos. › Dispositivos de medida para evaluar la forma, la configuración, el tamaño o el movimiento del cuerpo o de sus partes, con fines de diagnóstico (A61B 5/08 tiene prioridad; instrumentos de medida especialmente concebidos para la técnica dental A61C 19/04).
Fragmento de la descripción:
Sistema de navegación quirúrgico para realizar una cavidad de recepción para un acetábulo.
La invención se refiere a un sistema de navegación quirúrgico para una herramienta navegada para realizar una cavidad de recepción para un acetábulo en un hueso pélvico navegado, con un instrumento palpador navegado y con un dispositivo de procesamiento de datos para procesar los datos de posición de las piezas navegadas.
Para la implantación de una articulación coxofemoral artificial, se inserta un acetábulo artificial en el hueso pélvico, para lo que en el punto definido anatómicamente y con la orientación definida anatómicamente ha de realizarse una cavidad en el hueso pélvico para recibir el acetábulo. Normalmente, estas cavidades están configuradas de forma semiesférica y se realizan mediante una herramienta de fresado semicircular. Para poder determinar y mantener la posición exacta - es decir la orientación y la posición - de la cavidad de recepción, se conoce navegar mediante un sistema de navegación quirúrgico el hueso pélvico y la herramienta que produce la cavidad. Un sistema de navegación de este tipo permite determinar y vigilar la asignación espacial relativa de la herramienta y del hueso pélvico.
Durante la sustitución de un acetábulo defectuoso por un acetábulo artificial, normalmente, el acetábulo se implanta en el mismo lugar en el que anteriormente estaba dispuesto el acetábulo natural (documento WO2004/030556A2). En lo sucesivo, esta posición se denomina acetábulo primario.
No obstante, también hay casos en los que el acetábulo natural no se encuentra en la posición deseada anatómicamente, ya sea por un defecto congénito o por un desplazamiento del acetábulo natural de la posición del acetábulo primario, habitualmente hacia arriba, es decir, en la dirección craneal. En estos casos, durante el implante de un acetábulo artificial que ha de insertarse en la posición anatómica normal, es decir en la posición del acetábulo primario, resulta extraordinariamente difícil determinar dicha posición en el hueso pélvico para poder guiar la herramienta de la manera deseada.
La invención tiene el objetivo de realizar un sistema de navegación quirúrgico del tipo genérico de tal forma que se proporcione una ayuda al cirujano para la posición y la orientación correctas de la herramienta con respecto al hueso pélvico, de forma que la cavidad de recepción para el acetábulo pueda realizarse en el hueso pélvico en el lugar anatómico deseado y con la orientación deseada, aunque anteriormente el acetábulo natural no se haya encontrado en dicha posición anatómica deseada.
En un sistema de navegación quirúrgico del tipo mencionado al principio, este objetivo se consigue según la invención porque el dispositivo de procesamiento de datos está programado de tal forma que a partir de los datos de posición de un punto de gota de lágrima (figura de lágrima según Köhler) en el hueso pélvico, determinados con la ayuda del instrumento palpador navegado, a partir de los datos de posición del plano de entrada de la pelvis y a partir de los datos de posición de las dos espinas ilíacas anterosuperiores del hueso pélvico determina un plano de gota de lágrima que se extiende a través del punto de gota de lágrima y que es perpendicular respecto al plano de entrada de la pelvis y paralelo respecto a una línea que une las dos espinas ilíacas anterosuperiores, porque a una altura predefinida encima del plano de gota de lágrima determina un punto de referencia en una posición predefinida en la dirección anteroposterior y a una distancia predefinida con respecto a la superficie exterior del hueso pélvico en la dirección lateromedial, porque, usando los datos de posición de un acetábulo secundario desplazado en el sentido craneal con respecto al acetábulo primario, calcula la altura del punto de referencia encima del plano de gota de lágrima de tal forma que no se exceda un valor máximo de la distancia entre la altura del punto de referencia y el acetábulo secundario, y porque calcula la posición de la herramienta con respecto al hueso pélvico y con respecto al punto de referencia.
Con la ayuda de pocos puntos pronunciados del hueso pélvico y sobre la base de ciertas suposiciones anatómicas, de esta manera se consigue elegir la posición de la herramienta con la que se realiza la cavidad de recepción, de tal forma que la cavidad de recepción puede realizarse en la posición y la orientación deseadas en el hueso pélvico.
Partiendo del plano de entrada de la pelvis del hueso pélvico, tendido por las dos espinas ilíacas anterosuperiores, por una parte, y por la sínfisis púbica, por otra parte, y mediante la determinación de la posición de los puntos de gota de lágrima se consigue determinar el plano de gota de lágrima, es decir, un plano horizontal de la pelvis que atraviesa el punto de gota de lágrima y que constituye un plano de referencia, a partir del cual pueden determinarse la posición y la orientación de la cavidad de recepción.
Para ello, se determina un punto de referencia que se encuentra a una altura determinada encima de dicho plano de gota de lágrima y cuya posición en el sentido anteroposterior se elige mediante suposiciones anatómicas.
Finalmente, se determina también la distancia de dicho punto de referencia con respecto a la superficie exterior del hueso pélvico, a saber, en la dirección lateromedial. También para ello se aprovechan suposiciones anatómicas para determinar el punto de referencia que, por ejemplo, puede encontrarse dentro del hueso pélvico o que, en otro caso especialmente preferible, puede coincidir con el lado posterior del hueso pélvico en la zona del acetábulo.
En cuanto se conoce dicho punto de referencia, el sistema de navegación puede vigilar constantemente la posición relativa de la herramienta con respecto al hueso pélvico y, en particular, con respecto al punto de referencia, ofreciendo al cirujano una posibilidad de control para el guiado de la herramienta y la posición anatómica correcta de la cavidad de recepción en el hueso pélvico, que se consigue de esta forma. Especialmente se puede reducir el peligro de que la cavidad de recepción se realice a demasiada profundidad en el hueso pélvico, en cuyo caso en la zona del acetábulo queda una pared ósea demasiado delgada o incluso se produce una formación indeseable de ventanas en el hueso.
Resulta ventajoso si para determinar la posición del plano de entrada de la pelvis se acerca el instrumento palpador navegado a las dos espinas ilíacas anterosuperiores del hueso pélvico y a la sínfisis púbica, y si a partir de los datos de posición de estos tres puntos se calcula el plano de entrada de la pelvis.
Por lo tanto, a este respecto, también se puede recurrir a las características anatómicas del hueso pélvico, pudiendo realizarse de forma extracorporal la exploración de los tres puntos mencionados.
Resulta ventajoso si la altura del punto de referencia encima del plano de gota de lágrima se elige en función del dimensionamiento de la herramienta y, por tanto, del tamaño deseado de la cavidad de recepción, de tal forma que el borde inferior de la cavidad de recepción quede situado aproximadamente en el plano de gota de lágrima.
Generalmente, la cavidad de recepción se realiza con una fresa semiesférica, ya que mediante este dimensionamiento la cavidad de recepción semiesférica quede bien definida en cuanto a su altura.
En caso de un desplazamiento en el sentido craneal del acetábulo secundario, en el que está alojado el hueso femoral en el hueso pélvico antes de la operación, para el paciente resulta una reducción preoperativa de la pierna en comparación con un alojamiento anatómico normal en el acetábulo primario, en el que quedaría alojado un fémur en caso de un alojamiento anatómicamente correcto. Si se implanta el nuevo acetábulo en la zona del acetábulo primario, resulta inevitablemente un alargamiento de la pierna que normalmente se tolera. Sin embargo, se ha mostrado que el alargamiento de la pierna no es problemática hasta una magnitud de unos 25 mm, pero que pueden surgir problemas en caso de un alargamiento más grande, especialmente en caso de un alargamiento superior a 40 mm, ya que en este caso los músculos y los nervios se estiran excesivamente. Esto puede provocar daños y debería evitarse.
Por lo tanto, según un ejemplo 2 preferible está previsto que la altura del punto de referencia encima del plano de gota de lágrima se elige de tal forma que no se excede un valor máximo de la distancia...
Reivindicaciones:
1. Sistema de navegación quirúrgico para una herramienta (25) navegada para realizar una cavidad de recepción para un acetábulo en un hueso pélvico (6) navegado, con un instrumento palpador (9) navegado y con un dispositivo de procesamiento de datos (4) para procesar los datos de posición de las piezas navegadas, caracterizado porque el dispositivo de procesamiento de datos (4) está programado de tal forma que a partir de los datos de posición de un punto de gota de lágrima (17) (figura de lágrima según Köhler) en el hueso pélvico (6), determinados con la ayuda del instrumento palpador (9) navegado, a partir de los datos de posición del plano de entrada (16) de la pelvis y a partir de los datos de posición de las dos espinas ilíacas anterosuperiores (13, 14) del hueso pélvico (6), determina un plano de gota de lágrima (19) que se extiende a través del punto de gota de lágrima (17) y que es perpendicular respecto al plano de entrada (16) de la pelvis y paralelo respecto a una línea que une las dos espinas ilíacas anterosuperiores (13, 14), porque a una altura predefinida encima del plano de gota de lágrima (19) determina un punto de referencia (24, 24') en una posición predefinida en la dirección anteroposterior y a una distancia predefinida con respecto a la superficie exterior del hueso pélvico (6) en la dirección lateromedial, porque usando los datos de posición de un acetábulo secundario desplazado en la dirección craneal con respecto al acetábulo primario calcula la altura del punto de referencia (24, 24') encima del plano de gota de lágrima (19) de tal forma que no se exceda un valor máximo de la distancia entre la altura del punto de referencia (24, 24') y el acetábulo secundario, y porque calcula la posición de la herramienta (25) con respecto al hueso pélvico (6) y con respecto al punto de referencia (24, 24').
2. Sistema de navegación según la reivindicación 1, caracterizado porque el dispositivo de procesamiento de datos (4) está programado de tal forma que a partir de los datos de posición de las dos espinas ilíacas anterosuperiores (13, 14) y de la sínfisis púbica (15) del hueso pélvico (6), determinados mediante el instrumento palpador (9), calcula el plano de entrada (16) de la pelvis.
3. Sistema de navegación según una de las reivindicaciones 1 ó 2, caracterizado porque el dispositivo de procesamiento de datos (4) está programado de tal forma que la altura del punto de referencia (24, 24') encima del plano de gota de lágrima (19) se elige en función del dimensionamiento de la herramienta (25) y, por tanto, del tamaño deseado de la cavidad de recepción, de tal forma que el borde inferior de la cavidad de recepción queda situado aproximadamente en el plano de gota de lágrima (19).
4. Sistema de navegación según una de las reivindicaciones anteriores, caracterizado porque el valor máximo asciende a 40 mm.
5. Sistema de navegación según una de las reivindicaciones 1 a 3, caracterizado porque el valor máximo asciende a 25 mm.
6. Sistema de navegación según una de las reivindicaciones anteriores, caracterizado porque el dispositivo de procesamiento de datos (4) está programado de tal forma que determina el valor máximo entre un punto central del acetábulo secundario y los puntos de referencia (24, 24').
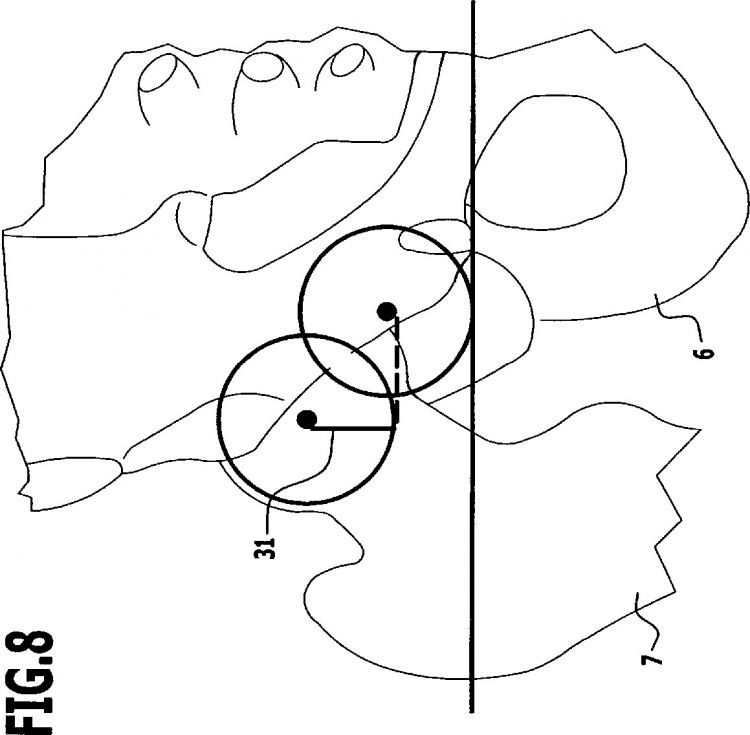
7. Sistema de navegación según la reivindicación 6, caracterizado porque el dispositivo de procesamiento de datos (4) está programado de tal forma que a partir de los datos de posición de un hueso femoral (7) navegado que se ha movido en el acetábulo secundario, antes de la operación, con respecto al hueso pélvico (6), determina el centro del movimiento del hueso femoral (7), usando dicho centro como punto central del acetábulo secundario.
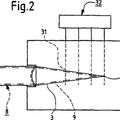
8. Sistema de navegación según la reivindicación 6, caracterizado porque el dispositivo de procesamiento de datos (4) está programado de tal forma que a partir de los datos de posición de un instrumento palpador (32) navegado, aplicado en la superficie de alojamiento del acetábulo secundario, determina la posición del acetábulo secundario, y porque a partir de los datos de posición del acetábulo secundario determina su centro como punto central del acetábulo secundario.
9. Sistema de navegación según una de las reivindicaciones anteriores, caracterizado porque el dispositivo de procesamiento de datos (4) está programado de tal forma que elige la posición del punto de referencia (24, 24') en la dirección anteroposterior, de tal forma que se encuentre aproximadamente en el centro de la cavidad de recepción.
10. Sistema de navegación según una de las reivindicaciones anteriores, caracterizado porque el dispositivo de procesamiento de datos (4) está programado de tal forma que a partir de los datos de posición determinados por la aplicación de un palpador (9) navegado en uno o varios puntos de medición (35) del borde dorsal (34) del hueso pélvico (6) en la zona del acetábulo primario, se determina una posición de la cavidad de recepción de tal forma que la distancia del borde de la cavidad de recepción con respecto al punto de medición (35) o a los puntos de medición del borde dorsal (34) no pase por debajo de un valor mínimo determinado.
11. Sistema de navegación según la reivindicación 10, caracterizado porque el dispositivo de procesamiento de datos (4) está programado de tal forma que de entre los datos de posición de varios puntos de medición (35) del borde dorsal (34) del hueso pélvico (6) elige aquél que más lejos esté dispuesto en la dirección ventral, y de tal forma que a partir de los datos de posición de dicho punto de medición (35) elegido determina el valor mínimo determinado.
12. Sistema de navegación según una de las reivindicaciones 10 u 11, caracterizado porque el dispositivo de procesamiento de datos (4) está programado de tal forma que determina un plano frontal dorsal (36) que atraviesa un punto de medición (35) del borde dorsal (34), y que determina el valor mínimo determinado entre el borde de la cavidad de recepción y dicho plano frontal dorsal (36).
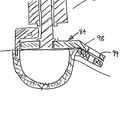
13. Sistema de navegación según una de las reivindicaciones anteriores, caracterizado porque el dispositivo de procesamiento de datos (4) está programado de tal forma que determina la distancia del punto de referencia (24) con respecto a la superficie exterior del hueso pélvico (6) a partir de los datos de posición de un instrumento palpador (21) navegado que se hace pasar en la dirección medial por el hueso pélvico (6), a través de un orificio artificial (20) en la zona del acetábulo primario del hueso pélvico (6), hasta alcanzar el lado posterior (23) del hueso pélvico (6).
14. Sistema de navegación según la reivindicación 13, caracterizado porque para determinar la distancia del punto de referencia (24) desde la superficie exterior del hueso pélvico (6), el instrumento palpador (21) presenta una superficie de contacto (12) que sobresale lateralmente de un vástago (11) para el contacto con el lado posterior (23) del hueso pélvico (6).
15. Sistema de navegación según una de las reivindicaciones anteriores, caracterizado porque el dispositivo de procesamiento de datos (4) está programado de tal forma que calcula la menor distancia de la superficie exterior (26) de la herramienta (25), que sirve para mecanizar el hueso, con respecto al punto de referencia (24, 24').
16. Sistema de navegación según una de las reivindicaciones 1 a 14, caracterizado porque el dispositivo de procesamiento de datos (4) está programado de tal forma que calcula la menor distancia entre el punto central (27) de la herramienta (25) y los puntos de referencia (24, 24').
17. Sistema de navegación según una de las reivindicaciones 1 a 14, caracterizado porque el dispositivo de procesamiento de datos (4) está programado de tal forma que calcula la menor distancia de la superficie exterior (26) de la herramienta (25), que sirve para mecanizar el hueso, con respecto a un plano sagital que atraviesa el punto de referencia (24, 24').
18. Sistema de navegación según una de las reivindicaciones 1 a 14, caracterizado porque el dispositivo de procesamiento de datos (4) está programado de tal forma que calcula la menor distancia entre el punto central (27) de la herramienta (25) y un plano sagital que atraviesa el punto de referencia (24, 24').
19. Sistema de navegación según una de las reivindicaciones 14 a 18, caracterizado porque el dispositivo de procesamiento de datos (4) está programado de tal forma que indica en una pantalla (5) la posición relativa de la herramienta (25) y del punto de referencia (24, 24') o del plano sagital dado por el punto de referencia (24, 24').
20. Sistema de navegación según una de las reivindicaciones 7 a 19, caracterizado porque el dispositivo de procesamiento de datos (4) está programado de tal forma que indica en una pantalla (5) la posición relativa de la herramienta (25) y del acetábulo secundario.
21. Sistema de navegación según una de las reivindicaciones 10 a 19, caracterizado porque el dispositivo de procesamiento de datos (4) está programado de tal forma que indica en una pantalla (5) la posición relativa de la herramienta (25) y de los puntos de medición (35) del borde dorsal (34) del hueso pélvico (6) y/o del plano frontal dorsal (36).
22. Sistema de navegación según una de las reivindicaciones anteriores, caracterizado porque el dispositivo de procesamiento de datos (4) está programado de tal forma que genera una señal de advertencia en cuanto se pase por encima o por debajo de valores críticos.
Patentes similares o relacionadas:
 KIT PARA TALLAR UNA ROSCA INTERNA EN HUESO, del 2 de Marzo de 2010, de CORIN LIMITED: Un kit para terrajar un hueso y tallar una rosca interna en el hueso que define un taladro, comprendiendo el kit:
un componente guía adaptado para recubrir el […]
KIT PARA TALLAR UNA ROSCA INTERNA EN HUESO, del 2 de Marzo de 2010, de CORIN LIMITED: Un kit para terrajar un hueso y tallar una rosca interna en el hueso que define un taladro, comprendiendo el kit:
un componente guía adaptado para recubrir el […]
 CATETER GUIADO ROBOTICAMENTE, del 19 de Agosto de 2010, de BIOSENSE WEBSTER, INC.: Aparato para usarse con un catéter manejable que incluye un control para el pulgar adaptado para controlar una desviación de […]
CATETER GUIADO ROBOTICAMENTE, del 19 de Agosto de 2010, de BIOSENSE WEBSTER, INC.: Aparato para usarse con un catéter manejable que incluye un control para el pulgar adaptado para controlar una desviación de […]
 PROCEDIMIENTO QUIRURGICO DE LOCALIZACION SIN IMAGEN PARA SUSTITUCION DE LA CADERA, del 23 de Julio de 2010, de KINAMED, INC: Un método de determinar la posición pélvica de un paciente quirúrgico e introducir dicha posición en un ordenador mediante un sistema de seguimiento, adecuado para uso […]
PROCEDIMIENTO QUIRURGICO DE LOCALIZACION SIN IMAGEN PARA SUSTITUCION DE LA CADERA, del 23 de Julio de 2010, de KINAMED, INC: Un método de determinar la posición pélvica de un paciente quirúrgico e introducir dicha posición en un ordenador mediante un sistema de seguimiento, adecuado para uso […]
 DISPOSITIVO DE TRATAMIENTO NO INVASIVO DE AFECCIONES DISCALES POR MEDIO DE ULTRASONIDOS, del 15 de Abril de 2010, de ULTRAZONIX DNT AB: Dispositivo de tratamiento no invasivo de afecciones discales por medio de ultrasonidos, que tiene al menos un transductor de ultrasonidos […]
DISPOSITIVO DE TRATAMIENTO NO INVASIVO DE AFECCIONES DISCALES POR MEDIO DE ULTRASONIDOS, del 15 de Abril de 2010, de ULTRAZONIX DNT AB: Dispositivo de tratamiento no invasivo de afecciones discales por medio de ultrasonidos, que tiene al menos un transductor de ultrasonidos […]
ATENUADOR DE HAZ DE DISCO GIRATORIO CON CUÑA VARIABLE PARA UN ENDOILUMINADOR OFTÁLMICO, del 9 de Febrero de 2012, de NOVARTIS AG: Atenuador de disco giratorio con cuña variable para su utilización en un endoiluminador oftálmico, que comprende: una cuña variable y un eje al que […]
MÉTODO Y APARATO PARA LA FABRICACIÓN DE FÉRULAS QUIRÚRGICAS ORTOGNÁTICAS, del 1 de Diciembre de 2011, de BOARD OF REGENTS THE UNIVERSITY OF TEXAS SYSTEM: Un método para la formación de un modelo compuesto computarizado de la estructura ósea y la dentición de un paciente, caracterizado por: colocar una pluralidad […]
CABEZAL DE DETECCIÓN PREOPERATORIO ADECUADO PARA SER ACOPLADO A UNA HERRAMIENTA DE EXÉRESIS, del 31 de Agosto de 2011, de CENTRE NATIONAL DE LA RECHERCHE SCIENTIFIQUE: Sonda peroperatoria para guiar una herramienta de exéresis, que comprende un cabezal de detección , comprendiendo dicho cabezal de detección: […]
SONDA ENDOILUMINADORA DE ALTO RENDIMIENTO, del 8 de Julio de 2011, de ALCON, INC: Endoiluminador de alto rendimiento, que comprende: una primera fibra óptica proximal , acoplada ópticamente a una fuente de luz y que puede funcionar para […]