PROCEDIMIENTO Y DISPOSITIVO PARA DETERMINAR UNA POSICIÓN.
Un procedimiento para la determinación de una posición en un dispositivo medidor de posiciones (1) con los siguientes pasos:
- Generación de señales de exploración en función de la posición (A, B) de una unidad detectora (2),
- recepción de valores momentáneos (DA, DB) de las señales de exploración (A, B) en un paso de exploración preestablecido (t), el cual es generado en el dispositivo medidor de posiciones (1) en forma sincronizada con respecto a un paso (T, D, T'') suministrado por la electrónica de seguimiento (10),
- generación de valores de posición (P) asignados a los pasos de exploración (t) a partir de las señales de exploración recibidas (DA, DB),
- generación de un valor de medición de posición resultante (PM) a partir de varios valores de posición (P) por filtración,
- transmisión serial de dicho valor de medición de posición resultante (PM) a través de una línea de datos serial (11) hacia una electrónica de seguimiento (10).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2002/010974.
Solicitante: DR. JOHANNES HEIDENHAIN GMBH.
Nacionalidad solicitante: Alemania.
Dirección: POSTFACH 12 60 83292 TRAUNREUT ALEMANIA.
Inventor/es: HAGL,Rainer.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01D5/244 FISICA. › G01 METROLOGIA; ENSAYOS. › G01D MEDIDAS NO ESPECIALMENTE ADAPTADAS A UNA VARIABLE PARTICULAR; DISPOSICIONES PARA LA MEDIDA DE DOS O MAS VARIABLES NO CUBIERTAS POR OTRA UNICA SUBCLASE; APARATOS CONTADORES DE TARIFA; DISPOSICIONES PARA TRANSFERENCIA O TRANSDUCTORES NO ESPECIALMENTE ADAPTADAS A UNA VARIABLE PARTICULAR; MEDIDAS O ENSAYOS NO PREVISTOS EN OTRO LUGAR. › G01D 5/00 Medios mecánicos para la transferencia de la magnitud de salida de un elemento sensor; Medios para la conversión de la magnitud de salida de un elemento sensor en otra variable, en los que la forma o naturaleza del elemento sensor no determinan los medios de conversión; Transductores no especialmente adaptados a una variable específica (G01D 3/00 tiene prioridad; especialmente adaptados para aparatos que dan resultados distintos al valor instantáneo de una variable G01D 1/00). › que influyen en las características de pulsos o trenes de pulsos; que generan pulsos o trenes de pulsos.
PDF original: ES-2376659_T3.pdf
Fragmento de la descripción:
Procedimiento y dispositivo para determinar una posición La invención se refiere a un procedimiento para determinar una posición en un dispositivo medidor de posiciones, así como un dispositivo medidor de posiciones para realizar dicho procedimiento.
Los dispositivos para determinar posiciones deben cumplir en creciente medida las exigencias planteadas por los sistemas de control de accionamiento altamente dinámicos. También se emplean en forma creciente los accionamientos directos, con los cuales se puede alcanzar una elevada calidad de control. Para ello, el requisito previo es una determinación exacta y dinámica de la posición y la velocidad. La determinación de la posición hoy en día se basa sobre todo en codificadores rotatorios o transductores de longitud incrementales o absolutos. A través de la información de amplitud contenida en las señales de exploración sinusoidales, mediante conmutaciones de interpolación se genera una información de posición que posee una resolución mucho mayor que el período de división del dispositivo medidor de posición. La velocidad normalmente se determina mediante una diferenciación de valores discretos de tiempo y la aceleración a través de una diferenciación adicional de la velocidad.
En los documentos relativos al seminario sobre regulación de posiciones "Fortschritte in der Regel-und Antriebstechnik” (Progresos en la técnica de regulación y accionamiento) que tuvo lugar el 13 y 14 de noviembre de 1998, se incluye un artículo con el título "Verbesserte Auswertung von inkrementalen Gebersystemen durch Oversampling” (Evaluación mejorada de sistemas transmisores incrementales por sobremuestreo) de D. Mann. En este artículo se indica que la determinación de la posición y la determinación de la velocidad se pueden mejorar a través del así llamado oversampling ("sobremuestreo") . Dicho oversampling se define como la suma de todos los valores de posición determinados durante un paso de exploración de un regulador (electrónica de seguimiento) dividida entre el número de tales valores. De la Fig. 11 y de la Fig. 15 se evidencia que el dispositivo de medición de posiciones propiamente dicho sólo suministra las señales de exploración analógicas A y B y que el procesamiento subsiguiente, incluyendo el procedimiento de oversampling, tiene lugar en la electrónica de seguimiento. Sin embargo, la transmisión de valores de medición de posición analógicos es relativamente susceptible a las interferencias y los ruidos, y también es negativa la elevada cantidad de conductores requeridos entre el dispositivo de medición de posiciones y la electrónica de seguimiento.
Un objeto de la presente invención consiste en proveer un procedimiento y un dispositivo para la determinación de posiciones que permita obtener una regulación cualitativamente buena y fiable sobre la base de los valores de medición de posición suministrados por el dispositivo medidor de posiciones a través de una línea de datos serial.
Este objeto es resuelto por el procedimiento descrito en la reivindicación 1.
En las reivindicaciones subordinadas a la reivindicación 1 se describen realizaciones convenientes de dicho procedimiento.
Adicionalmente, el objeto de la invención queda resuelto a través del dispositivo para la determinación de posiciones con las características que se describen en la reivindicación 11.
En las reivindicaciones subordinadas a la reivindicación 11 se describen realizaciones convenientes del dispositivo de acuerdo con la invención.
Con la presente invención es posible obtener una reducción en el número de conductores requeridos entre el dispositivo medidor de posiciones y la electrónica de seguimiento, mediante el uso de una interfaz serial con elevadas velocidades de transmisión. De esta manera, en los sistemas de accionamiento es posible mejorar el comportamiento de posicionamiento, el comportamiento de sincronización, el comportamiento de fallos, así como la generación de ruido.
La interfaz serial también puede ser usada para la transmisión de datos no críticos en relación al tiempo, tales como, p. ej., los parámetros del dispositivo medidor de posiciones, datos de vigilancia o datos de diagnóstico.
De acuerdo con la presente inversión, los valores reales de la posición y, dado el caso, los de la aceleración ya son explorados con una elevada frecuencia de reloj en el dispositivo medidor de posiciones y dichos valores reales son preprocesados por filtración, por ejemplo, mediante la determinación del valor promedio o un filtro pasabajos. Los valores reales resultantes que se obtienen de esta manera, a continuación son transmitidos a través de una interfaz serial hacía la electrónica de seguimiento al paso solicitado.
Para obtener una referencia cronológicamente exacta con respecto al paso interno de la electrónica de seguimiento, existen varias posibilidades:
- La electrónica de seguimiento emite una señal de paso continua, cuya frecuencia corresponde al paso de exploración o cuya frecuencia diverge del mismo, donde en caso de una divergencia tiene lugar una
multiplicación de la frecuencia o una división de la frecuencia, o -con cada paso de solicitud es sincronizado un paso interno del dispositivo medidor, por ejemplo un cristal de cuarzo o un circuito de sincronización de fase, y con ello se controla la sobreexploración en el dispositivo medidor de posiciones dentro de un ciclo de pasos de la electrónica de seguimiento prescrito por ésta, o -el paso de exploración se obtiene por la recuperación del paso en el dispositivo de medición de posiciones a partir de una corriente de datos en la electrónica de seguimiento.
Para determinar los valores reales de posición y/o de aceleración, los transductores A/D son controlados al paso de exploración para recibir los valores de medición.
La electrónica de seguimiento en particular es una regulación de accionamiento con un paso de regulación interno, del cual se deriva el paso de solicitud. El paso de exploración está sincronizado con dicho paso de solicitud y por lo tanto también con el paso de regulación.
A través de la presente invención es posible realizar una reducción en el número de conductores de señales entre el dispositivo medidor de posiciones y la electrónica de seguimiento. Son suficientes 6 líneas de señales o menos, concretamente dos para el paso, dos para el suministro de tensión y dos para los valores de medición (datos) . El paso también puede ser transmitido a través de las líneas de suministro de tensión.
Si en los dispositivos medidores de posición se quiere aprovechar los valores reales de aceleración de sensores de aceleración integrados o instalados en forma adyacente para someterlos igualmente a una sobreexploración, esto no causará un incremento en el número de líneas de señales, ya que también estos datos pueden ser transmitidos en forma serial en la línea de datos. La parametrización de la sobreexploración, tal como p. ej. el número de intervalos de exploración para los valores reales en comparación con el paso de transmisión o el paso del regulación, el tipo de filtro y el parámetro de filtro, puede ser ajustada a través de una interfaz bidireccional desde la electrónica de seguimiento.
A continuación, la invención será descrita más detalladamente con referencia a los ejemplos de realización representados en los dibujos.
La Figura 1 muestra una representación de principio de un dispositivo medidor de posiciones de acuerdo con la invención, La Figura 2 muestra una unidad de procesamiento del dispositivo medidor de posiciones de acuerdo con la Figura 1, La Figura 3 muestra un diagrama de señales;
La Figura 4 muestra una configuración de circuito para la obtención del paso de exploración a partir del paso de solicitud;
La Figura 5 muestra un principio para la recuperación del paso en el dispositivo medidor de posiciones;
La Figura 6 muestra una configuración de circuito para la recuperación del paso; y La Figura 7 muestra una configuración de circuito con línea de paso separada.
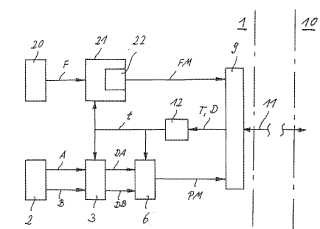
El dispositivo medidor de posiciones 1 representado en la Fig. 1 está formado por una unidad detectora 2, en cuya salida hay varias señales de exploración A, B analógicas que presentan un desplazamiento de fase mutuo de 90º . Una unidad detectora 2 de esta clase es en sí conocida, en donde las señales de exploración A, B son generadas por la exploración... [Seguir leyendo]
Reivindicaciones:
1. Un procedimiento para la determinación de una posición en un dispositivo medidor de posiciones (1) con los siguientes pasos:
- Generación de señales de exploración en función de la posición (A, B) de una unidad detectora (2) , -recepción de valores momentáneos (DA, DB) de las señales de exploración (A, B) en un paso de exploración preestablecido (t) , el cual es generado en el dispositivo medidor de posiciones (1) en forma sincronizada con respecto a un paso (T, D, T'') suministrado por la electrónica de seguimiento (10) , -generación de valores de posición (P) asignados a los pasos de exploración (t) a partir de las señales de exploración recibidas (DA, DB) , -generación de un valor de medición de posición resultante (PM) a partir de varios valores de posición (P) por filtración, -transmisión serial de dicho valor de medición de posición resultante (PM) a través de una línea de datos serial (11) hacia una electrónica de seguimiento (10) .
2. Un procedimiento de acuerdo con la reivindicación 1, caracterizado por que las señales de exploración en función de la posición (A, B) son señales analógicas sinusoidales con desplazamiento de fases mutuo, en donde cada una de dichas señales analógicas (A, B) es digitalizada en el momento del paso de exploración (t) y en donde respectivamente a partir de los valores digitales (DA, DB) de las señales de exploración mutuamente desplazadas en fase (A, B) se genera un valor de posición (P) .
3. Un procedimiento de acuerdo con la reivindicación 1, caracterizado por que la electrónica de seguimiento (10) emite una señal de paso continua (T, t'') hacia el dispositivo de medición de posiciones (1) , a partir del cual en el dispositivo medidor de posiciones (1) se obtiene el paso de exploración (t) por multiplicación de frecuencia.
4. Un procedimiento de acuerdo con la reivindicación 1, caracterizado por que el valor de medición de posición resultante (PM) es transmitido debido al paso de transmisión (T) transmitido por la electrónica de seguimiento (10) al dispositivo medidor de posiciones (1) , donde un generador de sincronismo (12) divide dicho paso de solicitud (T) en el paso de exploración (t) .
5. Un procedimiento de acuerdo con la reivindicación 1, caracterizado por que el paso de exploración (t) en el dispositivo medidor de posiciones (1) se obtiene por recuperación de paso a partir de una corriente de datos (D) de la electrónica de seguimiento (10) .
6. Un procedimiento de acuerdo con la reivindicación 1 o 2, caracterizado por que la transmisión del valor de medición de posición resultante (PM) es causada por un paso de transmisión (T) , y que la electrónica de seguimiento (10) presenta una regulación de accionamiento con un paso de regulación interno, donde el paso de transmisión (T) y el paso de exploración (t) se sincronizan con dicho paso de regulación.
7. Un procedimiento de acuerdo con la reivindicación 6, caracterizado por que el paso de exploración (t) se obtiene por recuperación de pasos a partir de una corriente de datos (D) de la electrónica de seguimiento (10) en el dispositivo medidor de posiciones (1) .
8. Un procedimiento de acuerdo con la reivindicación 1, caracterizado por los siguientes pasos:
- Generación de una señal de exploración (F) en función de la aceleración de un sensor de aceleración (20) , -recepción de los valores momentáneos de la señal de exploración (F) en un paso de exploración preestablecido (t) , -formación de un valor de aceleración resultante (FM) a partir de varios valores momentáneos por filtración, -transmisión serial de dicho valor de medición de aceleración resultante (FM) a través de la línea de datos serial (11) .
9. Un procedimiento de acuerdo con cualquiera de las reivindicaciones precedentes, caracterizado por que la filtración y/o el número de pasos de exploración (t) entre dos pasos de transmisión (T) consecutivos se ajusta a través de parámetros que son transmitidos al dispositivo medidor de posiciones (1) a través de la línea de datos serial (11) .
10. Un procedimiento de acuerdo con alguna de las reivindicaciones precedentes, caracterizado por que la filtración y/o el número de pasos de exploración (t) entre dos pasos de transmisión (T) consecutivos se ajusta en función de la velocidad.
11. Un dispositivo medidor de posiciones con
- una unidad detectora (2) para la generación de varias señales de exploración (A, B) en función de la posición, -una unidad receptora (3) que recibe valores momentáneos de las señales de exploración (DA, DB) en un paso
de exploración preestablecido (t) , -un generador de sincronismo (12, 12.1) que genera los pasos de exploración (t) en forma sincronizada con respecto a un paso (T, D, t'') suministrado por la electrónica de seguimiento (10) , -una unidad de procesamiento (6) , en la que por filtración se forma un valor de medición de posición (PM) resultante a partir de valores momentáneos (DA, DB) de varios pasos de exploración (t) , -una interfaz (9) que basada en un paso de transmisión (T) transmite el valor de medición de posición resultante (PM) a través de una línea de datos serial (11) a una electrónica de seguimiento (10) .
12. Un dispositivo medidor de posiciones de acuerdo con la reivindicación 11, caracterizado por que
- la unidad de recepción (3) presenta como mínimo un transductor A/D, y que -la unidad de procesamiento (6) incluye una unidad de interpolación (7) para la formación de valores de posición (P) asignados a los pasos de exploración (t) a partir de las señales de exploración digitalizadas (DA, DB) , así como un filtro (8) para la generación del valor de medición de posición resultante (PM) a partir de varios valores de posición (P) asignados a los pasos de exploración (t) .
13. Un dispositivo medidor de posiciones de acuerdo con la reivindicación 11, caracterizado por que el generador de sincronismo es un componente (13) para la recuperación de pasos del paso de exploración (t) a partir de una corriente de datos (D) pendiente en el dispositivo medidor de posiciones (1) .
14. Un dispositivo medidor de posiciones de acuerdo con alguna de las reivindicaciones precedentes 11 hasta 13, caracterizado por que un sensor de aceleración (20) para la generación de una señal de exploración (F) en función de la aceleración está asignado al dispositivo medidor de posiciones (1) , y que la señal de exploración (F) puede ser conducida hacia una unidad de procesamiento (21) para la formación de un valor de aceleración resultante (FM) a partir de varios valores momentáneos, en donde el valor de aceleración resultante (FM) puede ser transmitido a través de la línea de datos serial (11) .
Patentes similares o relacionadas:
Sistema y proceso para determinar desplazamientos de instrumentos de medición, del 10 de Junio de 2020, de PSC Engineering S.r.l: Sistema para determinar y restar desplazamientos (δ) de instrumentos de medición e instrumentaciones para aplicaciones navales para estabilizar […]
Método de estimación de fase y aparato para el mismo, del 20 de Mayo de 2020, de Novanta Corporation: Aparato para estimación de fase mediante el procesamiento de señales de sensor desde un conjunto de sensores , transportando las señales de sensor colectivamente una fase […]
Dispositivo de medición de la posición y procedimiento para el funcionamiento de un dispositivo de medición de la posición, del 29 de Abril de 2020, de DR. JOHANNES HEIDENHAIN GMBH: Dispositivo de medición de la posición que comprende: - un soporte de división , sobre el que está dispuesta la división de la medición , - una […]
Adaptador de enchufe, instrumento de ajuste y robot asociado, del 22 de Abril de 2020, de KUKA Deutschland GmbH: Adaptador de enchufe, que presenta: - una rosca , que está configurada para atornillar el adaptador de enchufe a un instrumento de ajuste , - un dispositivo […]
Dispositivo de medida de posición y método para utilizar un dispositivo de medida de posición, del 6 de Noviembre de 2019, de DR. JOHANNES HEIDENHAIN GMBH: Dispositivo de medida de posición que comprende un soporte de graduación sobre el que hay situada una graduación de medida , una unidad de detección […]
Cuentarrevoluciones magnético para la autodetección de estados de error al determinar el número de revoluciones detectables con este cuentarrevoluciones, del 23 de Octubre de 2019, de Leibniz-Institut für Photonische Technologien e.V: Cuentarrevoluciones magnético o contador de desplazamiento para la autodetección de estados de error al determinar números de revoluciones o números de desplazamientos […]
Método de comprobación para un dispositivo optoelectrónico de medida, y dispositivo, del 16 de Octubre de 2019, de FAGOR AUTOMATION S.COOP: Método de comprobación para un dispositivo optoelectrónico de medida, comprendiendo el dispositivo una regla graduada con una pluralidad de marcas distribuidas […]
 Dispositivo de medición de posición y método de funcionamiento de un dispositivo de medición de posición, del 28 de Agosto de 2019, de DR. JOHANNES HEIDENHAIN GMBH: Dispositivo de medición de posición que comprende un soporte de graduación con una graduación de medición , una unidad de exploración […]
Dispositivo de medición de posición y método de funcionamiento de un dispositivo de medición de posición, del 28 de Agosto de 2019, de DR. JOHANNES HEIDENHAIN GMBH: Dispositivo de medición de posición que comprende un soporte de graduación con una graduación de medición , una unidad de exploración […]