PROCEDIMIENTO Y DISPOSITIVO PARA LA DETERMINACION DE LA CLASE DE VEHICULO.
Procedimiento para la clasificación de vehículos (A) mediante su longitud de vehículo (L),
en el que se dirige sobre la calzada una radiación de radar en forma de un cono de radar (4) con un ángulo de apertura horizontal (a) bajo un ángulo de colocación agudo (ß) y a una distancia (a) respecto a una calzada, y mediante la evaluación de las señales de radar provocadas por la reflexión en un vehículo (A) que circula por la calzada, se determina un trayecto recorri- do (s), a lo largo del cual el vehículo (A) que está circulando refleja la radiación del radar, determinándose a partir de las señales del radar, por lo menos un valor de distancia (E) mediante el cual se puede deducir un recorrido de paso (d) a lo largo del cual el vehículo (A) atraviesa el cono de radar (4), y de la diferencia entre el trayecto recorrido (s) y el recorrido de paso (d) se determina la longitud del vehículo (L) que se compara con unas longitudes típicas de vehículo (Lm) para las diferentes clases de vehículos con el fin de clasificar el vehículo (A)
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E08008406.
Solicitante: ROBOT VISUAL SYSTEMS GMBH.
Nacionalidad solicitante: Alemania.
Dirección: OPLADENER STRASSE 202,40789 MONHEIM.
Inventor/es: BEHRENS, ANDREAS.
Fecha de Publicación: .
Fecha Solicitud PCT: 5 de Mayo de 2008.
Fecha Concesión Europea: 9 de Diciembre de 2009.
Clasificación Internacional de Patentes:
- G01S13/92 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 13/00 Sistemas que utilizan la reflexión o la rerradiación de ondas de radio, p. ej. sistemas de radar; Sistemas análogos que utilizan la reflexión o la rerradiación de ondas cuya naturaleza o longitud de onda sea irrelevante o no especificada. › para la medición de la velocidad.
- G01S7/41 G01S […] › G01S 7/00 Detalles de sistemas según los grupos G01S 13/00, G01S 15/00, G01S 17/00. › que utilizan el análisis de la señal de eco para la caracterización del blanco; Firma del blanco; Sección transversal del blanco.
- G08G1/015 G […] › G08 SEÑALIZACION. › G08G SISTEMAS DE CONTROL DE TRÁFICO (control de tráfico ferroviario, seguridad del tráfico ferroviario B61L; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para el control del tráfico G01S 13/91, G01S 15/88, G01S 17/88; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para anticolisión G01S 13/93, G01S 15/93, G01S 17/93; control de posición, rumbo, altitud o actitud de vehículos terrestres, de agua, el aire o el espacio, no es específico para un entorno de tráfico G05D 1/00). › G08G 1/00 Sistemas de control del tráfico para vehículos en carretera (disposición de las señales de tráfico o las señales de carretera E01F 9/00). › con disposiciones para distinguir dos o más tipos de vehículos, p. ej. distinción entre automóviles y ciclos.
Clasificación PCT:
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
Procedimiento y dispositivo para la determinación de la clase de vehículo.
La invención se refiere a un procedimiento mediante el cual se clasifica un vehículo que pasa a través de una radiación de radar orientada sobre una calzada.
Un procedimiento de esta clase se conoce de modo genérico por la Solicitud de Patente EP 0 067 905 A1.
En la técnica de medición del tráfico se emplean sistemas de radar Doppler especialmente para la vigilancia e imposición de limitaciones legales de velocidad para vehículos. Para ello puede ser interesante no solamente determinar la velocidad de un vehículo sino también clasificar los vehículos.
El documento EP 0 067 905 A1 se refiere a un procedimiento y a un dispositivo en los cuales por medio de la evaluación de señales de un dispositivo de medición de velocidades por medio de un radar Doppler se deduce la velocidad de un vehículo que se ha medido y se deduce un criterio de diferenciación para asignar el vehículo a una clase de vehículos. De este modo resulta posible disparar una cámara cuando se rebasen diferentes velocidades máximas correspondientes a diferentes clases de vehículos. Como criterio de diferenciación se determina un criterio para la longitud del vehículo, determinado por el número de oscilaciones de radar emitidas que se reflejan durante el paso del vehículo.
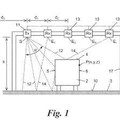
La aplicación del procedimiento de medida que aquí se describe, para una calzada con varios carriles se explicará sirviéndose de la Fig. 1.
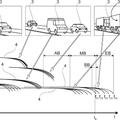
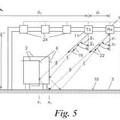
En la Fig. 1 se ha representado a título de ejemplo el paso de tres vehículos A1, A2, A3, que pasan a través de un cono de radar 4 con un ángulo de apertura a cuyo rayo principal está orientado en la dirección de la calzada con un ángulo de colocación ß. El ángulo de colocación ß también se puede realizar mediante un ángulo de bizqueo del sensor del radar. Los vehículos A1, A2, A3 atraviesan el cono del radar 4 cada uno en un carril distinto y por lo tanto en unos campos de distancia diferentes respecto al equipo de radar. Los vehículos A1, A2, A3 penetran en el cono del radar 4 en un momento t1a, t2a ó t3a, a una distancia respectiva de E1a, E2a ó E3a, y salen del cono del radar 4 en un momento t1b, t2b ó t3b respectivamente a una distancia E1b, E2b ó E3b. Durante el tiempo intermedio recorren, debido a que aumenta la anchura del cono del radar 4, y cada vez en función de la distancia E al equipo de radar 5, diferentes trayectos recorridos s1, s2 ó s3, es decir trayectos de diferente longitud.
A partir del número de oscilaciones de radar reflejadas entre el momento de entrada y el momento de salida ta ó tb respectivamente, y el conocimiento de un trayecto fijo e (producto de la semi-longitud de onda de la radiación de radar y cos ß) que recorre un vehículo A1, A2 ó A3 respectivamente durante una oscilación del radar, se puede determinar el respectivo trayecto recorrido s1, s2 ó s3, es decir su longitud, durante el cual el equipo de radar 5 recibe oscilaciones de radar reflejadas.
Dado que la medición comienza con la entrada del frente del vehículo y termina con la salida de su cola, los trayectos recorridos s1, s2 ó s3 se componen del respectivo trayecto de paso recorrido d1, d2 ó d3 a través del cono del radar 4, es decir su longitud y la respectiva longitud de vehículo L1, L2 ó L3 (véase la Figura 2 y la Figura 3).
La longitud del vehículo L solamente se puede determinar con exactitud a partir del trayecto recorrido s, si o bien todos los vehículos realizan el mismo trayecto de recorrido de paso d, o si se conoce el trayecto de recorrido de paso d y se puede determinar por lo tanto la longitud del vehículo L a partir del respectivo trayecto recorrido s.
Dado que el objetivo primario no es el de determinar la longitud del vehículo L sino utilizar ésta como medio para poder clasificar el vehículo que se ha medido, es por lo tanto suficiente con establecer un criterio de longitud que permita asignar el vehículo de forma unívoca a una sola clase de vehículo.
Por el documento DE 693 17 186 T2 (Solicitud paralela al documento US 5.402.346 A) se conoce un sistema para la determinación de por lo menos un parámetro de regulación del tráfico para vehículos.
Con el fin de permitir el control simultáneo de todos los carriles, se dirige sobre los carriles una radiación de radar pulsada. El lóbulo de radar formado (denominado aquí diagrama) es estrecho en cuanto al ángulo de apertura horizontal (denominado aquí ángulo lateral), y está inclinado hacia la calzada con un ángulo de colocación horizontal (denominado aquí también ángulo lateral).
Se cita la longitud del vehículo como uno de los parámetros de regulación de tráfico que se trata de determinar.
Éste se forma a partir del producto de la velocidad del vehículo que se ha determinado y el tiempo de permanencia del vehículo dentro del cono del radar, menos el recorrido que efectúa el vehículo al atravesar el cono de radar (recorrido de paso). Este recorrido de paso se forma como valor fijo a partir de la longitud de una ventana de distancia predeterminada y del coseno del ángulo de colocación horizontal y del ángulo de apertura horizontal.
En comparación con el documento EP 0 067 905 A1 donde se determina una diferencia de longitudes entre vehículos exclusivamente sirviéndose de los trayectos recorridos s determinados para los vehículos - en el documento DE 693 17 186 T2 también se determinan los recorridos efectuados, si bien por medio de la velocidad media y la duración de presencia del vehículo dentro del cono de radar - se corrigen en el documento DE 693 17 186 T2 estos recorridos con un valor fijo.
La precisión del criterio de diferenciación de la longitud del vehículo no se mejora de este modo. En ambos casos, los valores de longitud obtenidos adolecen de los mismos defectos ya que el recorrido de paso para vehículos que circulan a diferentes distancias respecto al aparato de radar no es constante. Cuanto mayor sea el ángulo de apertura horizontal del cono de radar tanto mayor es este error.
En el documento EP 0 067 905 A1 se indica por ejemplo que con la determinación del criterio de longitud que aquí se propone, es decir el trayecto recorrido s por medio del número de oscilaciones del radar, se pueden diferenciar un turismo con una longitud de 4,5 m y una anchura de 1,5 m y un minibús con una longitud de 6 m y una anchura de 2 m, de un camión con una longitud de 10 m y una anchura de 2,5 m, aunque los vehículos se encuentren en el primero, el segundo o el tercer carril. También queda claro no obstante que la diferenciación solamente es posible basándose en las grandes diferencias de longitudes, concretamente por una parte 4,5 m ó 6 m y por otra parte 10 m, que son mayores que el campo de tolerancia de los recorridos de paso d, en función de la anchura de la calzada. Un turismo de 4,5 m y un minibús de 6 m no se pueden diferenciar con seguridad si los vehículos circulan en cualquier lugar de la anchura de la calzada, es decir en diferentes carriles.
Para aquellos campos de aplicación en los que se tenga que vigilar un número mayor de los tres carriles que aquí se han indicado a título de ejemplo, o se desee una diferenciación más detallada que no sea sólo entre camiones y otros vehículos, la determinación de un criterio de longitud por medio de la determinación del trayecto recorrido s, p.ej. por medio del número de oscilaciones de radar reflejadas según el documento EP 0 067 905 A1, no presenta suficiente exactitud.
La clasificación de los vehículos puede ser interesante no solo para la aplicación indicada para una limitación de velocidad en función de las clases de vehículos sino también para vigilar la utilización ilícita de una carretera no autorizada para transporte de cargas pesadas, determinando la utilización de los carriles por diferentes clases de vehículos para fines estadísticos o reconocer vehículos sujetos al pago de peaje, si esta obligación viene determinada o debida a su clase de vehículo. También puede ser interesante identificar motocicletas o motociclos que sólo lleven una matrícula en la parte posterior, para disparar en caso de una infracción de velocidad una foto de cola adicional, limitada a estos vehículos. La longitud del vehículo también podría ser un criterio para asignar una velocidad que se haya medido a un vehículo dentro de un grupo...
Reivindicaciones:
1. Procedimiento para la clasificación de vehículos (A) mediante su longitud de vehículo (L), en el que se dirige sobre la calzada una radiación de radar en forma de un cono de radar (4) con un ángulo de apertura horizontal (a) bajo un ángulo de colocación agudo (ß) y a una distancia (a) respecto a una calzada, y mediante la evaluación de las señales de radar provocadas por la reflexión en un vehículo (A) que circula por la calzada, se determina un trayecto recorri- do (s), a lo largo del cual el vehículo (A) que está circulando refleja la radiación del radar, determinándose a partir de las señales del radar, por lo menos un valor de distancia (E) mediante el cual se puede deducir un recorrido de paso (d) a lo largo del cual el vehículo (A) atraviesa el cono de radar (4), y de la diferencia entre el trayecto recorrido (s) y el recorrido de paso (d) se determina la longitud del vehículo (L) que se compara con unas longitudes típicas de vehículo (Lm) para las diferentes clases de vehículos con el fin de clasificar el vehículo (A).
2. Procedimiento según la reivindicación 1, caracterizado porque el trayecto recorrido (s) que efectúa el vehículo (A) durante una oscilación de radar se determina a partir del número de oscilaciones de radar reflejadas y del recorrido (e) determinado por la longitud de onda de la oscilación del radar y el ángulo de colocación (ß).
3. Procedimiento según la reivindicación 1, caracterizado porque el trayecto recorrido (s) se determina a partir del tiempo de paso mediante los momentos de entrada (ta) en el cono de radar (4) y el de salida (tb) y se determina la velocidad medida (v).
4. Procedimiento según una de las reivindicación 1 a 3, caracterizado porque se determina un valor de distancia (E) que se asigna a un recorrido de paso (d) previamente memorizado.
5. Procedimiento según una de las reivindicación 1 a 3, caracterizado porque en el momento de entrada (ta) del vehículo (A) y en el momento de salida (tb) del vehículo (A) del cono de radar (4) se determinan valores de distancia (E), y a partir de los valores de distancia (E) y debido al ángulo de apertura (a) y al ángulo de colocación (ß) se calcula el recorrido de paso (d).
6. Procedimiento según una de las reivindicación 1 a 3, caracterizado porque los valores de distancia (E) se determinan a lo largo de todo el tiempo de paso, y a partir de los valores de distancia (E) y de la velocidad (v) se determina la huella del vehículo cuya longitud corresponde al recorrido de paso (d).
7. Procedimiento según una de las reivindicación 4-6, caracterizado porque el campo de medición determinado por el ángulo de apertura (a) se limita al determinar a partir de las señales de radar unos valores angulares, y solamente se utilizan para la determinación del trayecto recorrido (s) y del recorrido de paso (d) aquellos valores de medición que tienen asignados valores angulares situados entre unos valores angulares predeterminados.
8. Procedimiento según una de las reivindicación 1 a 7, caracterizado porque se memoriza la forma de la señal (M) de la radiación radar reflejada, causada por la reflectividad y tamaño y forma del perfil cubierto del vehículo (A) y se compara con formas de señal (Mm) típicas de distintas clases de vehículo previamente memorizadas para verificar la clasificación realizada.
9. Procedimiento según una de las reivindicación 1 a 8, caracterizado porque se realiza alguna toma del vehículo clasificado (A) y en la toma se reproduce una indicación relativa a la longitud del vehículo (L).
10. Procedimiento según una de las reivindicación 1 a 8, caracterizado porque se realiza una toma del vehículo clasificado (A) y en la toma se reproduce una indicación relativa a la clasificación (K).
11. Procedimiento según una de las reivindicación 8 ó 10, caracterizado porque solamente se realiza una toma si al vehículo clasificado (A) se le asigna una velocidad (v) que sea superior a la velocidad máxima para la clase de vehículo correspondiente.
12. Procedimiento según la reivindicación 11, caracterizado porque se establece una toma frontal y una toma posterior del vehículo clasificado (A) si éste se ha clasificado como motocicleta o furgoneta triciclo.
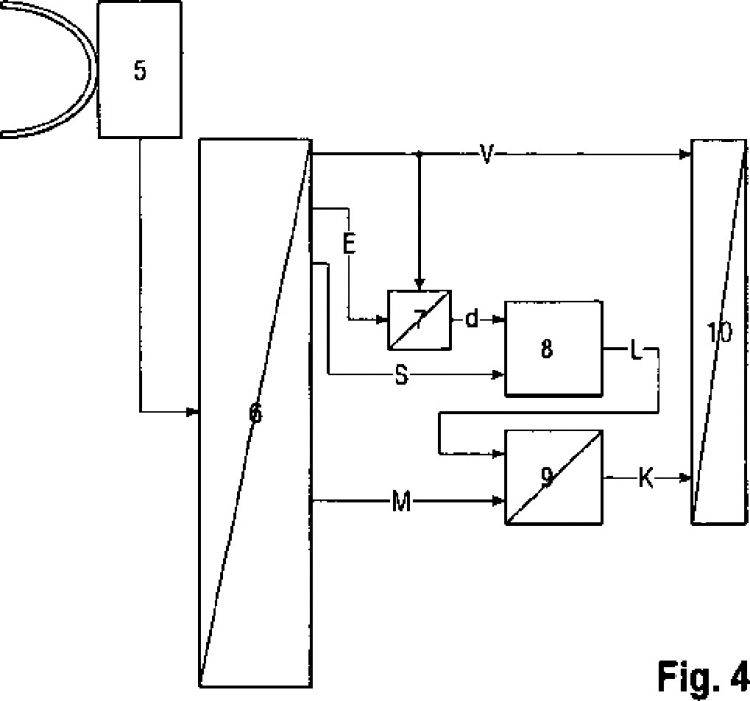
13. Dispositivo para clasificación de vehículos (A) por medio de su longitud de vehículo (L) con un equipo de radar (5) que bajo un ángulo de colocación agudo (ß) y a una distancia (a) a una calzada dirige una radiación radar en forma de un cono de radar (4) con un ángulo de apertura horizontal (a) sobre la calzada y recibe la radiación radar reflejada por un vehículo (A) y forma señales de radar, así como una unidad de evaluación y memoria (6) unida al equipo de radar (5), que es adecuada para determinar a partir de las señales de radar un trayecto recorrido (s) a lo largo del cual un vehículo (A) que está circulando refleja la radiación del radar,
estando la unidad de evaluación y memoria (6) realizada de tal modo que forma por lo menos un valor de distancia (E) mediante el cual se determina en una unidad de cálculo (7) dispuesta a continuación un recorrido de paso (d) a lo largo del cual el vehículo (A) atraviesa el cono de radar (4), estando presente una unidad de formación de la diferencia (8) que junto con la unidad de cálculo (7) y la unidad de evaluación y memoria (6) está realizada de tal modo que a partir de la diferencia entre el trayecto recorrido (s) y el recorrido de paso (d) determina la longitud del vehículo (L), para comunicarla a un comparador (9) dispuesto a continuación y unido a la unidad de formación de la diferencia (8), que es adecuado para comparar la longitud de vehículo (L) que se ha determinado con unas longitudes de vehículo (Lm) típicas de distintas clases de vehículo, que están memorizadas, con el fin de clasificar el vehículo (A).
14. Dispositivo según la reivindicación 13, caracterizado porque la unidad de evaluación y memoria (6) está prevista para memorizar la forma de la señal (M) de la radiación del radar reflejada, provocada por la reflectividad y el tamaño y la forma del perfil cubierto del vehículo (A) y estando el comparador (9) unido a la unidad de evaluación y memoria (6) y realizado de tal modo que compara la forma de la señal (M) con unas formas de señal (Mm) típicas de determinadas clases de vehículos, que están memorizadas, para verificar la clasificación hecha por medio de la longitud del vehículo (L).
15. Dispositivo según la reivindicación 13 ó 14, caracterizado por existir una cámara (10) para realizar una toma del vehículo clasificado (A) indicándose en la toma la longitud del vehículo (L) y/o la clasificación (K).
Patentes similares o relacionadas:
SISTEMA DE RECONOCIMIENTO Y CLASIFICACIÓN DE VEHÍCULOS, del 22 de Mayo de 2020, de INFORMATICA EL CORTE INGLES, S.A.: Los sistemas actuales de reconocimiento de vehículos se basan en el reconocimiento de imágenes, lo que supone unos tiempos de procesado muy elevados que no […]
 Procedimiento de clasificación de vehículos en movimiento, del 30 de Octubre de 2019, de JENOPTIK ROBOT GMBH: Procedimiento de clasificación de vehículos , en el que se acotan vehículos al pasar por un cono de radar formado por una radiación […]
Procedimiento de clasificación de vehículos en movimiento, del 30 de Octubre de 2019, de JENOPTIK ROBOT GMBH: Procedimiento de clasificación de vehículos , en el que se acotan vehículos al pasar por un cono de radar formado por una radiación […]
Sistema y procedimiento de clasificación de vehículos, del 17 de Septiembre de 2018, de Global Traffic Technologies LLC: Un procedimiento de clasificación de vehículos, que comprende: generar una forma de onda de señal a partir de una señal en un único bucle inductivo, […]
Sensor de radar integrado en la calzada, del 17 de Mayo de 2017, de VOLTRA solutions GmbH: Dispositivo para el registro de informaciones de tráfico con al menos un dispositivo de sensor dispuesto de modo insertado en la calzada , en el que […]
Dispositivo y procedimiento para la detección de un eje de rueda de un vehículo, del 25 de Enero de 2017, de KAPSCH TRAFFICCOM AG: Dispositivos para la detección de un eje de rueda de un vehículo en marcha sobre una calzada , comprendiendo: una pluralidad de sensores de radar […]
Método y sistema para detección y clasificación de vehículos, del 12 de Mayo de 2016, de ABERTIS AUTOPISTAS ESPAÑA, S.A. (UNIPERSONAL): Método y sistema para detección y clasificación de vehículos. La presente invención se refiere a un método y un sistema de detección […]
 Procedimiento para medir la posición de una superficie de un vehículo, del 19 de Noviembre de 2014, de KAPSCH TRAFFICCOM AG: Procedimiento para medir la posición (P) de una superficie de un vehículo sobre una calzada , con los pasos:
a) emisión de un primer rayo […]
Procedimiento para medir la posición de una superficie de un vehículo, del 19 de Noviembre de 2014, de KAPSCH TRAFFICCOM AG: Procedimiento para medir la posición (P) de una superficie de un vehículo sobre una calzada , con los pasos:
a) emisión de un primer rayo […]
 Dispositivo para medir la posición de un vehículo o de una superficie de este, del 19 de Noviembre de 2014, de KAPSCH TRAFFICCOM AG: Dispositivo para medir la posición (P) de un vehículo o de una superficie de este sobre una calzada , con
al menos un emisor de radar […]
Dispositivo para medir la posición de un vehículo o de una superficie de este, del 19 de Noviembre de 2014, de KAPSCH TRAFFICCOM AG: Dispositivo para medir la posición (P) de un vehículo o de una superficie de este sobre una calzada , con
al menos un emisor de radar […]