Procedimiento para determinar la longitud del trayecto recorrido por un vehículo.
Procedimiento para determinar la longitud (L) del trayecto (11,
12), recorrido por un vehículo (1),mediante el uso de un dispositivo de medición de posición (13) que registra posiciones (14) del vehículo (1) ymediante el uso de un mapa de carreteras digital (15) que está compuesto de segmentos de carretera (s2-s9) delongitudes de segmento conocidas (l2, l3), con los pasos de:
registrar posiciones (14) del vehículo (1) durante el trayecto (11, 12) mediante el dispositivo de medición de posición(13),
asignar las posiciones registradas (14) del vehículo a una secuencia de segmentos de carretera (s2-s9), ydeterminar la longitud (L) del trayecto a partir de las longitudes de segmento (l2, l3) de estos segmentos de carretera(s2-s9),
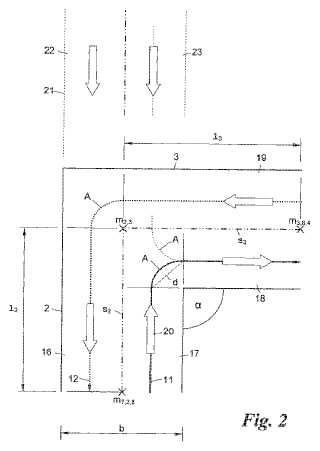
caracterizado porque para al menos dos segmentos de carretera consecutivos se calcula, a partir del ángulo ( α) entre dos segmentos de carretera consecutivos (s2-s9) y una anchura de carretera hipotética (b) de ambossegmentos de carretera (s2-s9), la longitud del trayecto de desviación (A) del vehículo (1) de un segmento decarretera a otro segmento de carretera, y la longitud (L) del trayecto se corrige, durante su determinación, en funciónde esta longitud del trayecto de desviación (A).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E10450146.
Solicitante: KAPSCH TRAFFICCOM AG.
Nacionalidad solicitante: Austria.
Dirección: Am Europlatz 2 1120 Wien AUSTRIA.
Inventor/es: NAGY, OLIVER, Tijink,Jasja, KAES,KATHARINA.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01C22/00 FISICA. › G01 METROLOGIA; ENSAYOS. › G01C MEDIDA DE DISTANCIAS, NIVELES O RUMBOS; TOPOGRAFIA; NAVEGACION; INSTRUMENTOS GIROSCOPICOS; FOTOGRAMETRIA O VIDEOGRAMETRIA (medida del nivel de líquidos G01F; radio navegación, determinación de la distancia o velocidad mediante la utilización de efectos de propagación, p. ej. efecto Doppler, tiempo de propagación, de ondas de radio, disposiciones análogas que utilicen otras ondas G01S). › Medida de la distancia recorrida sobre el suelo por vehículos, personas, animales u otros cuerpos sólidos en movimiento, p. ej. utilizando odómetros o usando podómetros.
- G07B15/02 G […] › G07 DISPOSITIVOS DE CONTROL. › G07B APARATOS DE ENTREGA DE TIQUES; TAXIMETROS; DISPOSICIONES O APARATOS PARA COBRAR EN UN PUNTO DE CONTROL EL PRECIO DE LOS BILLETES O LOS DERECHOS DE ENTRADA O DE PEAJE; APARATOS PARA FRANQUEAR. › G07B 15/00 Dispositivos o aparatos para cobrar el precio de los billetes, el peaje o las entradas en uno o más puntos de control (monedas o papeles de valor, p. ej. billetes G07D; aparatos para la venta o el alquiler de artículos o de servicios accionados por monedas, tarjetas de crédito, billetes o similares G07F 7/00, G07F 17/00). › que tiene en cuenta factores variables como la distancia o el tiempo, p. ej. para el transporte de pasajeros, sistemas de aparcamiento o sistemas de alquiler de coches (G07B 15/06 tiene prioridad; taxímetros G07B 13/00; parquímetros per se G07F 17/24).
- G07B15/06 G07B 15/00 […] › Disposiciones para tarificación vial o peaje urbano de vehículos o usuarios de vehículos, p. ej. sistema automático de peaje.
PDF original: ES-2423024_T3.pdf
Fragmento de la descripción:
Procedimiento para determinar la longitud del trayecto recorrido por un vehículo La presente invención se refiere a un procedimiento para determinar la longitud del trayecto recorrido por un vehículo mediante el uso de un dispositivo de medición de posición que registra posiciones del vehículo y mediante el uso de un mapa de carreteras digital que está compuesto de segmentos de carretera de longitudes de segmento conocidas, con los pasos de:
registrar posiciones del vehículo en el trayecto mediante el dispositivo de medición de posición, asignar las posiciones registradas del vehículo a una secuencia de segmentos de carretera, y determinar la longitud del trayecto a partir de las longitudes de segmento de estos segmentos de carretera.
Un procedimiento de este tipo es conocido, por ejemplo, según el preámbulo de la reivindicación 1, por el documento DE102006027676A1.
Por el documento EP1471329A2 es conocido un procedimiento de búsqueda de ruta óptima para la navegación en una red de carreteras, aplicándose en el caso de desviaciones en las rutas, que se van a analizar, factores de ponderación que dependen de la dificultad de desviarse aquí en situaciones reales de la carretera, por ejemplo, del ángulo de desviación y de la relación de anchura de las carreteras en cuestión.
La medición del tramo o de la longitud del trayecto recorrido por un vehículo es una de las bases fundamentales para el cálculo de peaje en los modernos sistemas de peaje viario que se basan en mapas digitales. A tal efecto, las posiciones del vehículo determinadas mediante navegación por satélite (“position fixes”, posiciones establecidas) se asignan, por ejemplo, mediante “map matching” (cotejo de mapas) , a los segmentos de carretera del mapa de carreteras digital y a partir de sus longitudes se determina el tramo recorrido. La invención se basa en el conocimiento de que este procedimiento está sujeta a una inexactitud considerable, ya que se basa en suposiciones idealizadas: Los segmentos de carretera de los mapas de carreteras digitales, disponibles actualmente, representan carreteras reales de una forma lineal idealizada a fin de simplificar y reducir el coste de almacenamiento. Las longitudes de segmento de los segmentos de carretera están definidas aquí en cada caso entre los puntos de intersección de las carreteras reales.
Los solicitantes han reconocido que un error de medición significativo se acumula si un vehículo no sigue estos puntos medios de intersección idealizados, sino que aprovecha la anchura real de la carretera y toma en particular curvas interiores o exteriores, pasando por delante de los puntos medios de intersección. La invención crea por primera vez un procedimiento que tiene en cuenta los errores de representación de mapas de carreteras digitales idealizados y sobre la base de estos mapas de carreteras permite determinar la longitud del trayecto con una exactitud mayor que los procedimientos conocidos.
A tal efecto, según las reivindicaciones 1 a 12 se calcula para al menos dos segmentos de carretera consecutivos a partir del ángulo entre dos segmentos de carretera consecutivos y una anchura de carretera hipotética de ambos segmentos de carretera la longitud del trayecto de desviación del vehículo de un segmento de carretera a otro segmento de carretera, y la longitud del trayecto se corrige, al determinarse, en función de esta longitud del trayecto de desviación.
Partiendo de segmentos de carretera de un mapa de carreteras digital con una forma lineal idealizada, el procedimiento según la invención calcula un modelo realista de red de carreteras al aplicar por primera vez en el cálculo de longitud trayectos de desviación reales en intersecciones de carretera. Como resultado de esto, el trayecto recorrido por un vehículo se puede determinar con una exactitud esencialmente mayor que con los procedimientos conocidos.
Una realización particularmente ventajosa de la invención para mapas de carreteras digitales, en los que al menos un segmento de carretera representa una carretera con al menos dos carriles asignados a direcciones de marcha opuestas, se caracteriza porque al calcularse el trayecto de desviación hacia/desde este segmento de carretera se calcula el trayecto de desviación hacia/desde el carril que está asignado a la dirección de marcha del vehículo. Asimismo, otra realización preferida de la invención para mapas de carreteras digitales, en los que al menos un segmento de carretera representa una carretera con al menos dos carriles, de los que al menos un carril está asignado a una dirección de desviación determinada, se caracteriza porque al calcularse el trayecto de desviación hacia/desde este segmento de carretera se calcula el trayecto de desviación hacia/desde el carril que está asignado a la dirección de desviación del vehículo. Por tanto, ambas variantes tienen en cuenta no sólo la posición mutua de los segmentos de carretera, sino adicionalmente también el historial de movimiento (“track”) del vehículo para la selección y el cálculo del trayecto de desviación que se va a aplicar entre segmentos de carretera. La determinación de la longitud del trayecto se puede configurar así de manera aún más exacta.
En otra realización de la invención que se caracteriza por un cálculo particularmente rápido, el trayecto de desviación se puede calcular aproximadamente como un polígono. Alternativamente, el trayecto de desviación se puede calcular también como un arco de curva, lo que proporciona una aproximación más exacta a las condiciones reales de la carretera.
Si el mapa de carreteras digital contiene datos sobre la anchura de la carretera, estos datos se pueden tomar directamente del mapa de carreteras. Sin embargo, como anchura de carretera se asume preferentemente un valor predefinido, por lo que el procedimiento se puede ejecutar sobre la base de mapas de carreteras convencionales con carreteras digitalizadas de forma lineal.
Otra realización particularmente preferida de la invención se caracteriza porque previamente se calculan posibles trayectos de desviación entre segmentos de carretera del mapa de carreteras digital y estos trayectos se almacenan de manera temporal en una tabla, de la que se toma a continuación el respectivo trayecto de desviación que se va a tener en cuenta entre dos segmentos de carretera.
Otras posibilidades de aceleración del procedimiento, por ejemplo, para el procesamiento en tiempo real en un OBU, un servidor de facturación de peaje o un servidor de map matching, radican en una o varias de las siguientes medidas preferidas:
un trayecto de desviación entre dos segmentos de carretera se calcula y se tiene en cuenta sólo si el ángulo entre estos segmentos supera un valor mínimo predefinido; los trayectos de desviación en el desarrollo del trayecto recorrido se calculan y se tienen en cuenta sólo si estos superan una cantidad mínima predefinida o si su suma supera un valor mínimo predefinido; no se calculan ni se tienen en cuenta trayectos de desviación entre más de dos segmentos de carretera consecutivos, entre los que existen ángulos aproximadamente iguales, pero alternos respecto a su dirección de desviación; y/o los trayectos de desviación se calculan y se tienen en cuenta sólo para segmentos de carretera en determinadas áreas del mapa de carreteras digital, preferentemente sólo en áreas urbanas.
La invención se explica detalladamente a continuación por medio de un ejemplo de realización representado en los dibujos adjuntos. En los dibujos muestran:
Fig. 1 por secciones, una red de carreteras que está modelada mediante un mapa de carreteras digital y en la que los vehículos recorren trayectos a modo de ejemplos; y Fig. 2 en detalle, el procedimiento de la invención para determinar las longitudes de los trayectos recorridos en una desviación de la red de carreteras de la figura 1.
La figura 1 muestra un vehículo 1 que se mueve en las carreteras 2-9, a modo de ejemplos, de una red de carreteras 10 representada por secciones. Con la línea de puntos 11 y con la línea gruesa 12 se representan dos posibles trayectos que puede recorrer el vehículo 1 en la red de carreteras 10.
El vehículo 1 está equipado con un aparato de vehículo 13 (onboard unit, OBU, unidad de a bordo) que determina continuamente su posición, por ejemplo, con ayuda de la navegación por satélite u otras formas conocidas. Para ilustrar se muestran tres posiciones de vehículo 14 a modo de ejemplos (position fixes) . Las posiciones de vehículo 14 son registradas por el aparato de vehículo 13 o son transmitidas por éste a una central (no representada) de un sistema de peaje viario para su registro.
La red... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para determinar la longitud (L) del trayecto (11, 12) , recorrido por un vehículo (1) , mediante el uso de un dispositivo de medición de posición (13) que registra posiciones (14) del vehículo (1) y mediante el uso de un mapa de carreteras digital (15) que está compuesto de segmentos de carretera (s2-s9) de longitudes de segmento conocidas (l2, l3) , con los pasos de: registrar posiciones (14) del vehículo (1) durante el trayecto (11, 12) mediante el dispositivo de medición de posición (13) , asignar las posiciones registradas (14) del vehículo a una secuencia de segmentos de carretera (s2-s9) , y determinar la longitud (L) del trayecto a partir de las longitudes de segmento (l2, l3) de estos segmentos de carretera (s2-s9) , caracterizado porque para al menos dos segmentos de carretera consecutivos se calcula, a partir del ángulo (e) entre dos segmentos de carretera consecutivos (s2-s9) y una anchura de carretera hipotética (b) de ambos segmentos de carretera (s2-s9) , la longitud del trayecto de desviación (A) del vehículo (1) de un segmento de carretera a otro segmento de carretera, y la longitud (L) del trayecto se corrige, durante su determinación, en función de esta longitud del trayecto de desviación (A) .
2. Procedimiento según la reivindicación 1, en el que al menos un segmento de carretera (s2-s9) del mapa de carreteras digital (15) representa una carretera (2-9) con al menos dos carriles (16-19) asignados a direcciones de marcha opuestas (20) , caracterizado porque al calcularse el trayecto de desviación (A) hacia/desde este segmento de carretera (s2-s9) se calcula el trayecto de desviación (A) hacia/desde el carril (16-19) que está asignado a la dirección de marcha (20) del vehículo (1) .
3. Procedimiento según la reivindicación 1 ó 2, en el que al menos un segmento de carretera (s2-s9) del mapa de carreteras digital (15) representa una carretera (21) con al menos dos carriles (22, 23) , de los que al menos un carril (23) está asignado a una dirección de desviación determinada, caracterizado porque al calcularse el trayecto de desviación (A) hacia/desde este segmento de carretera (s2-s9) se calcula el trayecto de desviación (A) hacia/desde el carril (23) que está asignado a la dirección de desviación del vehículo (1) .
4. Procedimiento según una de las reivindicaciones 1 a 3, caracterizado porque el trayecto de desviación (A) se calcula como línea poligonal.
5. Procedimiento según una de las reivindicaciones 1 a 3, caracterizado porque el trayecto de desviación (A) se calcula como arco de curva.
6. Procedimiento según una de las reivindicaciones 1 a 5, caracterizado porque la mencionada anchura de carretera hipotética (b) se toma del mapa de carreteras digital (15) .
7. Procedimiento según una de las reivindicaciones 1 a 15, caracterizado porque como anchura de carretera (b) se asume un valor predefinido.
8. Procedimiento según una de las reivindicaciones 1 a 7, caracterizado porque se calculan posibles trayectos de desviación (A) entre segmentos de carretera (s2-s9) del mapa de carreteras digital (15) de forma previa y se almacenan de manera temporal en una tabla, de la que se toma a continuación el respectivo trayecto de desviación (A) que se va a tener en cuenta entre dos segmentos de carretera.
9. Procedimiento según una de las reivindicaciones 1 a 8, caracterizado porque un trayecto de desviación (A) entre dos segmentos de carretera (s2-s9) se calcula y se tiene en cuenta sólo si el ángulo (e) entre segmentos supera un valor mínimo predefinido.
10. Procedimiento según una de las reivindicaciones 1 a 9, caracterizado porque los trayectos de desviación (A) en el desarrollo del trayecto recorrido (11, 12) se calculan y se tienen en cuenta sólo si superan una cantidad mínima predefinida o si su suma supera un valor mínimo predefinido.
11. Procedimiento según una de las reivindicaciones 1 a 10, caracterizado porque no se calculan ni se tienen en cuenta trayectos de desviación (A) entre más de dos segmentos de carretera consecutivos (s2-s9) , entre los que existen ángulos (e) aproximadamente iguales, pero alternos respecto a su dirección de desviación.
12. Procedimiento según una de las reivindicaciones 1 a 11, caracterizado porque los trayectos de desviación (A) se calculan y se tienen en cuenta sólo para segmentos de carretera (s2-s9) en determinadas áreas del mapa de carreteras digital (15) , preferentemente sólo en áreas urbanas.
REFERENCIAS CITADAS EN LA DESCRIPCIÓN
Esta lista de referencias citadas por el solicitante es únicamente para la comodidad del lector. No forma parte del documento de la patente europea. A pesar del cuidado tenido en la recopilación de las referencias, no se pueden 5 excluir errores u omisiones y la EPO niega toda responsabilidad en este sentido.
Documentos de patente citados en la descripción 10 • DE102006027676A1 [0002] • EP1471329A2 [0003]
Patentes similares o relacionadas:
 Procedimiento para registrar vehículos estacionados y para calcular tasas de estacionamiento, del 18 de Septiembre de 2019, de Cleverciti Systems GmbH: Procedimiento para registrar vehículos estacionados y para calcular tasas de estacionamiento, en donde
- se detectan y/o se fijan zonas de estacionamiento […]
Procedimiento para registrar vehículos estacionados y para calcular tasas de estacionamiento, del 18 de Septiembre de 2019, de Cleverciti Systems GmbH: Procedimiento para registrar vehículos estacionados y para calcular tasas de estacionamiento, en donde
- se detectan y/o se fijan zonas de estacionamiento […]
Provisión de servicios municipales usando dispositivos móviles y una red de sensores, del 11 de Septiembre de 2019, de Stationnement Urbain Developpements et Etudes: Un dispositivo móvil que comprende: un procesador , una memoria acoplada al procesador, un visualizador , un mecanismo de entrada […]
Procedimiento de control de acceso a una zona reservada con control de validez de un título de acceso almacenado en la memoria de un dispositivo móvil, del 10 de Abril de 2019, de Revenue Collection Systems France SAS: Procedimiento de control de acceso a una zona reservada mediante un sistema de control de acceso a la zona reservada, el procedimiento comprende los […]
Sistema de gestión de aparcamiento, del 30 de Enero de 2019, de ONE SITU: Un método para monitorear un espacio de aparcamiento por un parquímetro , comprendiendo el método: determinar y comunicar, mediante el parquímetro […]
Soporte publicitario para transportes públicos con carga de contenido remoto, del 3 de Octubre de 2018, de DREAMS FACTORY ADVERTISING AND DESIGN COMPANY, S.L: Soporte publicitario para transportes públicos con carga de contenido remoto. La invención consiste en un soporte publicitario autónomo, que se auto-gestiona […]
Pago móvil de billetes de transporte, del 4 de Julio de 2018, de VISA U.S.A. INC: Un sistema de transporte para el uso en combinación con un dispositivo móvil para proporcionar acceso a un usuario de un dispositivo móvil, donde el sistema de […]
Método para llevar a cabo un proceso de estacionamiento con la ayuda de un dispositivo de telefonía móvil, del 27 de Diciembre de 2017, de DEUTSCHE TELEKOM AG: Método para llevar a cabo una proceso de estacionamiento utilizando un dispositivo de telefonía móvil conectado a una red pública de telefonía móvil , con […]
PROCEDIMIENTO Y SISTEMA DE CONTROL DE VEHÍCULOS Y PLAZAS DE APARCAMIENTO PARA APARCAMIENTOS EXTERIORES, del 16 de Noviembre de 2017, de QUERCUS TECHNOLOGIES, S.L: Un procedimiento y sistema de control de vehículos y plazas de aparcamiento para aparcamientos exteriores , comprendiendo: […]