CIP-2021 : A01D 46/30 : Dispositivos robotizados para recoger los productos de la cosecha uno por uno.
CIP-2021 › A › A01 › A01D › A01D 46/00 › A01D 46/30[1] › Dispositivos robotizados para recoger los productos de la cosecha uno por uno.
Notas[g] desde A01D 34/00 hasta A01D 51/00: Cosechadoras o segadoras para hierba, cereales y otros vegetales
A NECESIDADES CORRIENTES DE LA VIDA.
A01 AGRICULTURA; SILVICULTURA; CRIA; CAZA; CAPTURA; PESCA.
A01D RECOLECCION; SIEGA.
A01D 46/00 Recolección de frutas, hortalizas, lúpulo o productos similares; Dispositivos para sacudir los árboles o arbustos.
A01D 46/30 · Dispositivos robotizados para recoger los productos de la cosecha uno por uno.
CIP2021: Invenciones publicadas en esta sección.
Cosecha selectiva automatizada de cultivos.
(28/08/2019) Un dispositivo para cosechar selectivamente cultivos en una planta, comprendiendo el dispositivo:
un aparato de recogida , pudiéndose rotar el aparato de recogida alrededor de un eje central, comprendiendo el aparato de recogida:
una pluralidad de pinzas separadas y extendidas cada una radialmente desde el eje central , y configuradas cada una para recoger uno de los cultivos individual diferente;
un conjunto de transporte que comprende un primer mecanismo de rotación:
un conjunto portador que comprende un segundo mecanismo de rotación;
uno o más sensores de obtención de imágenes ; y
una unidad de procesamiento ;
en el que:
cada una de la pluralidad de pinzas pueden ajustarse entre…
EQUIPO PORTÁTIL PARA LA COSECHA SELECTIVACON IDENTIFICACIÓN DE FRUTOS POR COLOR.
(20/08/2015) La presente invención corresponde a un equipo portátil para la cosecha selectiva y un método para identificación de frutos y cosecha selectiva de frutos de café u otros frutos, el equipo portátil para la cosecha selectiva de frutos en una rama que comprende: un sistema de adquisición de imágenes , un sistema de procesamiento de imágenes, un mecanismo de desprendimiento , un sistema de control, un mecanismo de recepción, y, un sistema de alimentación de energía al equipo, el equipo también posee un sistema de servo-visión. El método para la identificación de frutos por color y cosecha selectiva que comprende las etapas de (a) adquirir imágenes de los frutos en la rama; (b) almacenarlas imágenes en una…
Dispositivo y método para la separación de una parte de una cosecha.
(25/12/2013) Dispositivo para la separación de una cosecha de una parte de cosecha, tal como un fruto u hoja, que comprendeun portador provisto de medios de agarre para dicha parte de la cosecha, y medios de corte para dicha partede cosecha, dichos medios de agarre que comprenden elementos giratorios dispuestos opuestos uno al otro, entrelos cuales un punto de pinzamiento se delimita para la admisión de dicha parte de cosecha que debe ser quitada,caracterizado por el hecho de que dichos medios de corte están dispuestos de manera que el punto de corte dedicha parte de cosecha se extiende en la extensión de dicho punto de pinzamiento.
Método y dispositivo para la retirada de una hoja de una planta de cultivo.
(27/05/2013) Método para la retirada de hojas de una planta de cultivo , que comprende la observación de una primerahoja de la planta de cultivo desde una posición baja usando técnicas de visión para determinar la retirada de la primerahoja, la retirada de dicha primera hoja por medios de arrancamiento, donde dicha retirada comprende el hecho deagarrar dicha hoja o su peciolo, arrancar dicho peciolo del tallo central de la planta de cultivo y apartar la hoja de dichaplanta de cultivo, la observación repetida desde abajo de dicha planta de cultivo después de la retirada de dicha hoja yel uso de dichas técnicas de visión para determinar la hoja posterior que va a ser retirada a continuación y la retirada dedicha hoja posterior.
MAQUINA PARA LA RECOLECCION AUTOMATICA DE FRUTOS CULTIVADOS EN HILERAS.
(03/01/2011) Máquina para la recolección automática de frutos cultivados en hileras, comprendiendo un vehículo autónomo, de estructura tubular , conformada por largueros unidos entre sí mediante travesaños , y con rueda que abarca varias hileras de cultivo , incorporando brazos robóticos autónomos e independientes controlados mediante un procesador común, estando montados sobre una plataforma que se desplaza sobre una guía , y cuyo extremo con sistema de visión y posicionado, y dispone de una cazoleta curvada con forma de embudo dotada de una ranura con una cuchilla , dispuesta oblicuamente. El sistema de visión y posicionado comprende una cámara , un sensor de contacto y un sensor de distancia
PROCEDIMIENTO Y VEHICULO DE RECOGIDA PARA LA RECOLECCION DE CULTIVOS QUE CRECEN EN TALLOS.
(20/05/2010) Un procedimiento para la recolección de frutas o verduras, en particular frutas o verduras en ramilletes o racimos, como tomates en ramillete, uvas y similares, en el que el procedimiento comprende las siguientes etapas:
a) colocar un vehículo de recogida adyacente a una planta que tiene fruta a lo largo de una fila de plantas que tienen fruta;
b) activar un sistema de visión, de forma que el sistema de visión reconocerá la presencia de un ramillete o de un racimo de frutas o verduras en dicha planta, y determinar si las frutas o verduras están maduras para ser recolectadas; si el racimo o el ramillete está maduro para ser recolectado el…
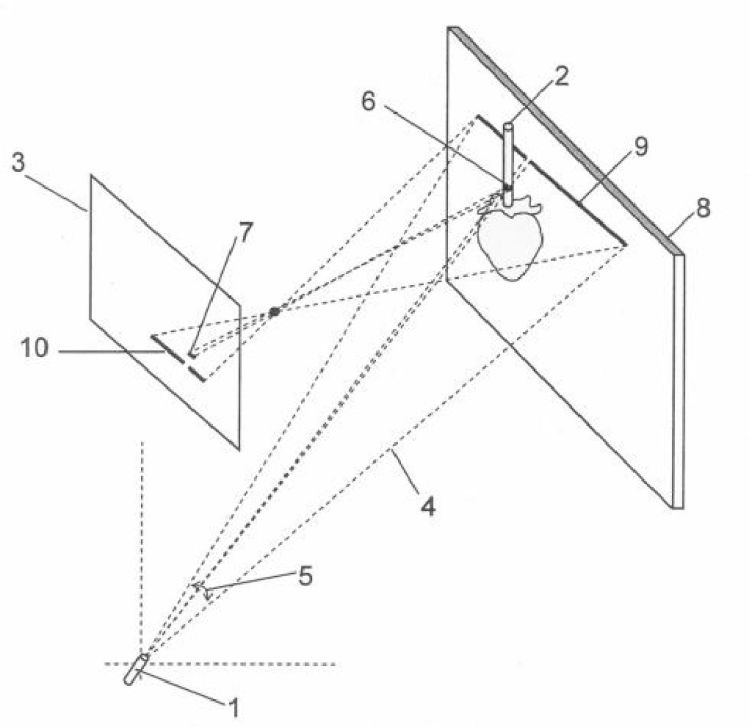
DETECTOR DE PEDUNCULOS Y TALLOS VEGETALES BASADO EN LA DESIGNACION OPTICA CON LASER DE LINEA.
(04/12/2009). Ver ilustración. Solicitante/s: UNIVERSIDAD POLITECNICA DE MADRID. Inventor/es: CASAR CORREDERA,JOSE RAMON, TARRIO ALONSO,PAULA, BESADA PORTAS,JUAN ALBERTO, PORTILLO GARCIA,JAVIER IGNACIO, DURAN ALTISENT,JOSE MARIA.
Detector de pedúnculos y tallos vegetales basado en la designación óptica con láser de línea. Esta invención resuelve el problema de designar y estimar con precisión la posición 3-D de un punto de un pedúnculo o de un tallo mediante la utilización de un diodo láser de línea para generar instantáneamente sobre él una marca óptica perfectamente identificable. Un láser de línea es un diodo láser de "spot" convencional con una lente que esparce la luz en ángulo plano o abanico que, al alcanzar el pedúnculo (o tallo), produce sobre él una marca óptica. A partir de la imagen o imágenes de la escena tomadas por el sensor o sensores de visión, se puede encontrar la posición 3-D del punto marcado por un proceso convencional de triangulación, y, en consecuencia, dirigir con precisión un manipulador robótico para realizar la tarea deseada: recolección, trasplante, etc.
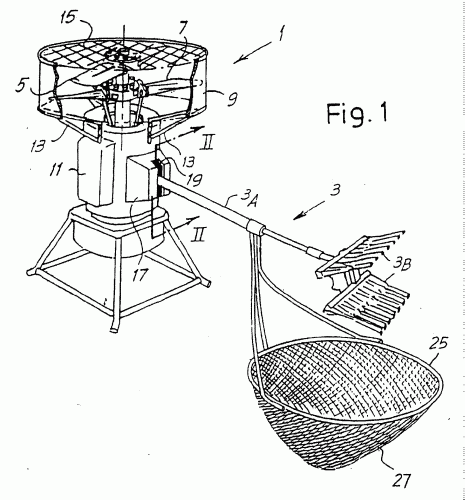
HELICOPTERO CONTROLADO REMOTAMENTE.
(01/11/2006). Ver ilustración. Solicitante/s: MAFLEX S.R.L. Inventor/es: MAZZOTTI, GIUSEPPE.
Aparato para recolectar aceitunas, bayas o bien otros frutos, o para llevar a cabo otras operaciones en follaje de plantas, tales como podado o rociado con líquidos o con insecticidas para combatir plagas de las plantas, caracterizado porque comprende: un helicóptero controlado remotamente por un operario en el suelo; una herramienta que puede ser girada horizontalmente, la cual se aplica al helicóptero; y medios para girar horizontalmente y accionar (3C, 3D) la herramienta controlada remotamente por el operario a fin de orientar la herramienta y llevarla contra el follaje de la planta y accionarla entonces, llevando a cabo de ese modo la operación deseada.
{kind=link}
{kind=link}