Sistema de vista cenital para una excavadora.
Sistemas y métodos para proporcionar una vista cenital de una máquina industrial,
tales como una excavadora. Un sistema incluye al menos un procesador configurado para recibir datos de al menos un sensor instalado en la excavadora en relación con el área alrededor de la excavadora, identificar una pluralidad de planos basados en los datos, determinar si la pluralidad de planos están colocados en una configuración predeterminada asociado con un camión volquete, y si la pluralidad de planos se sitúan en la configuración predeterminada, superponer la pluralidad de planos en una vista cenital de la excavadora y la zona.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2013/034664.
Solicitante: Harnischfeger Technologies, Inc.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 2751 Centerville Road. Suite 342 19808 Wilmington DE Delaware ESTADOS UNIDOS DE AMERICA.
Inventor/es: HARGRAVE JR.,Brian K, REILAND,Mathew J, MUNOZ,Ryan A, KOXLIEN,Steven, SISNEROS,Paul.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G06F19/00
- G06K9/00 FISICA. › G06 CALCULO; CONTEO. › G06K RECONOCIMIENTO DE DATOS; PRESENTACION DE DATOS; SOPORTES DE REGISTROS; MANIPULACION DE SOPORTES DE REGISTROS (impresión per se B41J). › Métodos o disposiciones para la lectura o el reconocimiento de caracteres impresos o escritos o el reconocimiento de formas, p. ej. de huellas dactilares (métodos y disposiciones para la lectura de grafos o para la conversión de patrones de parámetros mecánicos, p.e. la fuerza o la presencia, en señales eléctricas G06K 11/00; reconocimiento de la voz G10L 15/00).
Fragmento de la descripción:
Sistema de vista cenital para una excavadora Sector de la técnica
La invención se engloba en el sector de la técnica de la construcción.
Antecedentes
Las realizaciones de la presente invención se refieren a la provisión de una vista cenital de los objetos físicos detectados situados alrededor de una máquina industrial, tal como una excavadora de cables eléctrica o mecánica.
Explicación de la invención
Las máquinas industriales, tales como las excavadoras de cables eléctricas o mecánicas, dragas, etc., se usan para realizar operaciones de excavación para retirar material, por ejemplo, desde un banco de una mina. Un operario controla una excavadora de cables durante una operación de excavación para cargar una cuchara con material. El operario deposita el material de la cuchara a un camión volquete. Después de depositar el material, el ciclo de excavación continúa y el operario hace pivotar la cuchara de nuevo al banco para realizar una excavación adicional.
Conforme se mueve la cuchara, es importante tener una trayectoria de giro despejada para evitar impactar con otros objetos. Por ejemplo, la cuchara puede impactar contra el camión volquete u otro equipo en la trayectoria de giro. La cuchara puede impactar también contra el banco, el suelo, otras partes de la excavadora, y/u otros objetos situados alrededor de la excavadora. El impacto, especialmente si es fuerte, puede causar daños a la cuchara y al objeto impactado. Además, el impacto puede causar daños a otros componentes de la excavadora.
Por consiguiente, las realizaciones de la invención proporcionan sistemas y procedimientos para la detección y mitigación de colisiones de la excavadora. Para detectar las colisiones, los sistemas y procedimientos detectan los objetos dentro de una zona alrededor de una excavadora. Después de la detección de objetos, opcionalmente, los sistemas y los procedimientos pueden aumentar el control de la excavadora para mitigar el impacto de posibles colisiones con los objetos detectados. Cuando se mitiga una colisión, los sistemas y procedimientos pueden proporcionar alertas al operario de la excavadora usando una retroalimentación audible, visual y/o táctil.
En particular, una realización de la invención proporciona un sistema para proporcionar una vista cenital de una zona alrededor de una excavadora. El sistema incluye al menos un procesador. El al menos un procesador está configurado para recibir datos desde al menos un sensor instalado en la excavadora, en el que los datos están relacionados con la zona alrededor de la excavadora, identificar una pluralidad de planos en base a los datos, y determinar si la pluralidad de planos están posicionados en una configuración predeterminada asociada con un camión volquete. Si la pluralidad de planos están posicionados en la configuración predeterminada, el al menos un procesador está configurado para superponer la pluralidad de planos sobre una imagen de vista cenital de la excavadora y la zona.
Otra realización de la invención proporciona un procedimiento para proporcionar una vista cenital de una zona alrededor de una máquina industrial. El procedimiento incluye recibir, en al menos un procesador, datos desde al menos un sensor instalado en la máquina industrial, en el que los datos están relacionados con la zona alrededor de la máquina industrial. El procedimiento incluye también identificar, mediante el al menos un procesador, una pluralidad de planos en base a los datos, determinar, mediante el al menos un procesador, si la pluralidad de planos están posicionados en una configuración predeterminada asociada con un objeto físico predeterminado y, si la pluralidad de planos están posicionados en la configuración predeterminada, superponer la pluralidad de planos sobre una imagen de vista cenital de la máquina industrial y la zona.
Otros aspectos de la invención serán evidentes tras una consideración de la descripción detallada y los dibujos adjuntos.
Breve descripción de los dibujos
El archivo de solicitud o patente contiene al menos un dibujo en color. Las copias de esta patente o publicación de solicitud de patente con el dibujo o dibujos a color serán proporcionados por la oficina bajo petición y abonando la tasa necesaria.
La Fig. 1 ¡lustra una máquina industrial y un camión volquete según una realización de la invención.
La Fig. 2 ilustra un controlador para la máquina industrial de la Fig. 1.
La Fig. 3 es un diagrama de flujo que ilustra un procedimiento de detección de objetos llevado a cabo por el controlador de la Fig. 2.
La Fig. 4 ilustra planos ejemplares detectados por el controlador de la Fig. 2.
La Fig. 5 ilustra volúmenes de exclusión ejemplares definidos por el controlador de la Fig. 2 en base a los planos de la Fig. 4.
La Fig. 6 ¡lustra las imágenes capturadas alrededor de una máquina industrial.
La Fig. 7 ilustra una vista cenital de la máquina industrial basada en las imágenes de la Fig. 6.
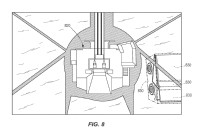
La Fig. 8 ilustra la vista cenital de la Fig. 7 superpuesta con los planos detectados por el controlador de la Fig. 2.
La Fig. 9 es un diagrama de flujo que ilustra un procedimiento para mitigar colisiones, llevado a cabo por el controlador de la Fig. 2.
La Fig. 1 ¡lustra un controlador para una máquina industrial según otra realización de la Invención.
Descripción detallada
Antes de explicar detalladamente cualquiera de las realizaciones de la invención, debe entenderse que la invención no se limita en su aplicación a los detalles de construcción y la disposición de componentes expuestos en la descripción siguiente o ¡lustrados en los dibujos siguientes. La invención es capaz de otras realizaciones y puede ser puesta en práctica o puede ser llevada a cabo de diversas maneras. Debe entenderse también que la fraseología y la terminología usada en la presente memoria tienen un propósito descriptivo y no deben considerarse como limitativas. El uso de "que Incluye", "que comprende" o "que tiene" y sus variaciones en la presente memoria pretende abarcar los elementos listados a continuación y sus equivalentes, así como elementos adicionales. Los términos "montado", "conectado" y "unido" se usan ampliamente y abarcan tanto un montaje, conexión y acoplamiento directo como un montaje, conexión y acoplamiento indirecto. Además, "conectado" y "acoplado" no se limitan a conexiones o acoplamientos físicos o mecánicos, y puede incluir conexiones o acoplamientos eléctricos, directos o indirectos. Además, pueden realizarse comunicaciones y notificaciones electrónicas usando cualquier medio conocido, incluyendo conexiones directas, conexiones inalámbricas, etc.
Cabe señalar también que pueden usarse una pluralidad de dispositivos basados en hardware y en software, así como una pluralidad de diferentes componentes estructurales, para poner en práctica la invención. Además, debería entenderse que las realizaciones de la Invención pueden incluir componentes o módulos hardware, software y electrónicos que, para los propósitos de descripción, pueden ser ilustrados y descritos como si la mayoría de los componentes estuviesen implementados exclusivamente en hardware. Sin embargo, una persona con conocimientos ordinarios en la materia, y basándose en una lectura de la presente descripción detallada, reconocería que, en al menos una realización, los aspectos de la invención basados en la electrónica pueden ser implementados en software (por ejemplo, almacenado en unos medios no transitorios, legibles por ordenador) ejecutables por uno o más procesadores. Como tal, cabe señalar que pueden usarse una pluralidad de dispositivos basados en hardware y software, así como una pluralidad de diferentes componentes estructurales, para ¡mplementar la invención. Además, y tal como se describe en los párrafos siguientes, las configuraciones mecánicas específicas ¡lustradas en los dibujos pretenden ejemplificar realizaciones de la invención y son posibles otras configuraciones mecánicas alternativas. Por ejemplo, los "controladores" descritos en la especificación pueden incluir componentes de procesamiento estándares, tales como uno o más procesadores, uno o más módulos de medios legibles por ordenador, una o más interfaces de entrada/salida y diversas conexiones (por ejemplo, un bus de sistema) que conectan los componentes.
La Fig. 1 representa una excavadora 1 de cables ejemplar. La excavadora 1 de cables incluye cadenas 15 para impulsar la excavadora 1 de cables hacia adelante y hacia atrás, y para hacer girar la excavadora 1 de cables (es decir, variando la velocidad y/o dirección de la cadenas izquierda y derecha, una con respecto a la otra). Las cadenas 15 soportan una...
Reivindicaciones:
1. Un sistema para proporcionar una vista cenital de una zona alrededor de una excavadora, en el que el sistema comprende:
al menos un procesador configurado para
recibir datos desde al menos un sensor instalado en la excavadora, en el que los datos están relacionados con la zona alrededor de la excavadora,
identificar una pluralidad de planos en base a los datos,
determinar si la pluralidad de planos están posicionados en una configuración predeterminada asociada con un camión volquete, y
si la pluralidad de planos están posicionados en la configuración predeterminada, superponer la pluralidad de planos en una imagen de vista cenital de la excavadora y la zona.
2. Sistema según la reivindicación 1, en el que el al menos un procesador está configurado además para establecer un color de al menos uno de entre la pluralidad de planos superpuestos en base a una distancia entre la cuchara y el al menos uno de entre la pluralidad de planos.
3. Sistema según la reivindicación 1, en el que el al menos un procesador está configurado además para animar al menos uno de entre la pluralidad de planos superpuestos.
4. Sistema según la reivindicación 1, en el que el al menos un procesador está configurado además para modificar al menos uno de entre la pluralidad de planos superpuestos para alertar a un operario de la excavadora de una posible colisión entre la cuchara y el camión volquete.
5. Sistema según la reivindicación 1, en el que el al menos un procesador está configurado además para superponer una Imagen que ¡lustra una vista cenital de la excavadora sobre la imagen de vista cenital.
6. Sistema según la reivindicación 4, en el que el al menos un procesador está configurado además para modificar la imagen que ilustra la vista cenital de la excavadora en base a una posición actual de la cuchara.
7. Sistema según la reivindicación 1, en el que el al menos un procesador está configurado además para mostrar la imagen de vista cenital en una interfaz de usuario incluida en la excavadora.
8. Sistema según la reivindicación 1, en el que el al menos un procesador está configurado además para mostrar la imagen de vista cenital en una interfaz de usuario remota de la excavadora.
9. Sistema según la reivindicación 1, en el que el al menos un sensor incluye al menos un escáner láser.
1. Sistema según la reivindicación 1, en el que el al menos un sensor incluye al menos una cámara estéreo.
11. Sistema según la reivindicación 1, en el que el al menos un sensor incluye al menos un escáner láser y al menos una cámara estéreo.
12. Sistema según la reivindicación 1, en el que el al menos un procesador está configurado para determinar si la pluralidad de planos están posicionados en la configuración predeterminada mediante la determinación de si la pluralidad de planos incluye un plano de cabecera horizontal, un plano de caja de camión horizontal, un plano frontal vertical, dos planos laterales verticales y un plano posterior vertical.
13. Un procedimiento para proporcionar una vista cenital de una zona alrededor de una máquina industrial, en el que el procedimiento comprende:
recibir, en al menos un procesador, los datos desde al menos un sensor instalado en la máquina industrial, en el que los datos están relacionados con la zona alrededor de la máquina industrial,
identificar, por medio del al menos un procesador, una pluralidad de planos en base a los datos,
determinar, por medio del al menos un procesador, si la pluralidad de planos están posicionados en una configuración predeterminada asociada con un objeto físico predeterminado,
si la pluralidad de planos están posicionados en la configuración predeterminada, superponer la pluralidad de planos sobre una imagen de vista cenital de la máquina industrial y la zona.
14. Procedimiento según la reivindicación 13, que comprende además establecer un color de al menos uno de entre la pluralidad de planos superpuestos en base a una distancia entre al menos un componente móvil de la máquina industrial y el al menos uno de entre la pluralidad de planos superpuestos.
15. Procedimiento según la reivindicación 13, que comprende además animar al menos uno de entre la pluralidad 5 de planos superpuestos.
16. Procedimiento según la reivindicación 13, que comprende además modificar al menos uno de entre la pluralidad de planos superpuestos para alertar a un operario de la excavadora de una posible colisión entre al menos un componente móvil de la máquina industrial y el objeto físico.
17. Procedimiento según la reivindicación 13, que comprende además superponer una imagen que ilustra una vista 1 cenital de la máquina industrial sobre la imagen de vista cenital.
18. Procedimiento según la reivindicación 17, que comprende además modificar la imagen que ilustra la vista cenital de la máquina industrial en base a una posición actual de al menos un componente móvil de la máquina industrial.
19. Procedimiento según la reivindicación 13, que comprende además mostrar la imagen de vista cenital en una 15 interfaz de usuario incluida en la excavadora.
2. Procedimiento según la reivindicación 13, que comprende además mostrar la imagen de vista cenital en una interfaz de usuario remota de la excavadora.
21. Procedimiento según la reivindicación 13, en el que la recepción de los datos desde el al menos un sensor incluye recibir los datos desde al menos uno de entre un escáner láser y una cámara estéreo.
22. Procedimiento según la reivindicación 13, en el que la determinación de si la pluralidad de planos están
posicionados en la configuración predeterminada incluye la determinación de si la pluralidad de planos incluye un plano de cabecera horizontal, un plano de caja de camión horizontal, un plano frontal vertical, dos planos laterales verticales y un plano posterior vertical.
Patentes similares o relacionadas:
Método y aparato de autentificación de identidad, terminal y servidor, del 29 de Julio de 2020, de Advanced New Technologies Co., Ltd: Un método de autenticación de identidad, en donde el método comprende: adquirir información de rasgos faciales de un usuario y utilizar la información […]
 Sistema de generación de marcador y método, del 29 de Julio de 2020, de NEC CORPORATION: Un sistema de generación de marcador que comprende:
medios de entrada de imagen de vídeo para proporcionar como entrada una imagen de vídeo;
[…]
Sistema de generación de marcador y método, del 29 de Julio de 2020, de NEC CORPORATION: Un sistema de generación de marcador que comprende:
medios de entrada de imagen de vídeo para proporcionar como entrada una imagen de vídeo;
[…]
Dispositivo de procesamiento de imágenes, método de procesamiento de imágenes y programa, del 29 de Julio de 2020, de RAKUTEN, INC: Dispositivo de procesamiento de imágenes, que comprende: medios de obtención de imágenes captadas para la lectura de datos […]
PROCEDIMIENTO Y DISPOSITIVO DE REGISTRO AUTOMÁTICO DE LA LOCOMOCIÓN DE NEMATODOS U ORGANISMOS PEQUEÑOS DE TAMAÑOS SIMILARES POR INTERFEROMETRÍA TEMPORAL DE MICROHACES DE LUZ, del 23 de Julio de 2020, de PHYLUMTECH S.A: Procedimiento y dispositivo de registro automático de la locomoción de nematodos u organismos pequeños de tamaños similares por interferometría temporal de microhaces […]
MÉTODO PARA LA ELIMINACIÓN DEL SESGO EN SISTEMAS DE RECONOCIMIENTO BIOMÉTRICO, del 2 de Julio de 2020, de UNIVERSIDAD AUTONOMA DE MADRID: Método para eliminación del sesgo (por edad, etnia o género) en sistemas de reconocimiento biométrico, que comprende definir un conjunto de M muestras de Y personas […]
Método, dispositivo de generación de imagen y sistema para generar una medición de autenticidad de un objeto, del 1 de Julio de 2020, de SICPA HOLDING SA: Un método, llevado a cabo por un dispositivo de generación de imagen , para generar una medición de autenticidad de un objeto o para contribuir en la generación […]
Cámara inteligente para compartir fotografías automáticamente, del 1 de Julio de 2020, de QUALCOMM INCORPORATED: Un procedimiento para compartir una imagen final utilizando un dispositivo, en el que el procedimiento es realizado por un servidor y comprende: […]
Estimación de una postura basada en la silueta, del 24 de Junio de 2020, de VIZRT AG: Un método implementado por ordenador para estimar una postura de un modelo de objeto articulado , en el que el modelo de objeto articulado […]